一种基于高压BLDC与PMSM的无位置控制系统及方法与流程
本发明属于电机控制,涉及一种基于高压bldc与pmsm的无位置控制系统及方法。
背景技术:
1、目前电驱动系统常使用的无位置传感器控制技术分为针对bldc的方波无位置控制与针对pmsm的正弦波无位置控制。其中,针对bldc的方波无位置控制零低速段常采用转子定位加开环起动的方法,中高速段常采用的方法有端电压法、相电压法、三次谐波法、反电势积分法估算转子位置;针对pmsm的正弦波无位置控制零低速段常采用恒压频比开环起动或高频注入法,中高速段采用滑模观测器法估算转子位置。
2、上述基于bldc的方波无位置控制方式在零低速起动阶段存在起动不平滑、转矩脉动大的问题;基于pmsm的正弦波无位置控制在中高速阶段存在预估转子位置波动引起偶发的电流尖峰所导致的系统可靠性低的问题。
技术实现思路
1、本发明的目的是:提供一种基于高压bldc与pmsm的无位置控制系统及方法,综合以上控制方式的优势且克服了方波控制零低速阶段起动不平滑、转矩脉动大与正弦波控制中高速阶段预估转子位置波动引起偶发的电流尖峰的不足。
2、本发明技术方案如下:
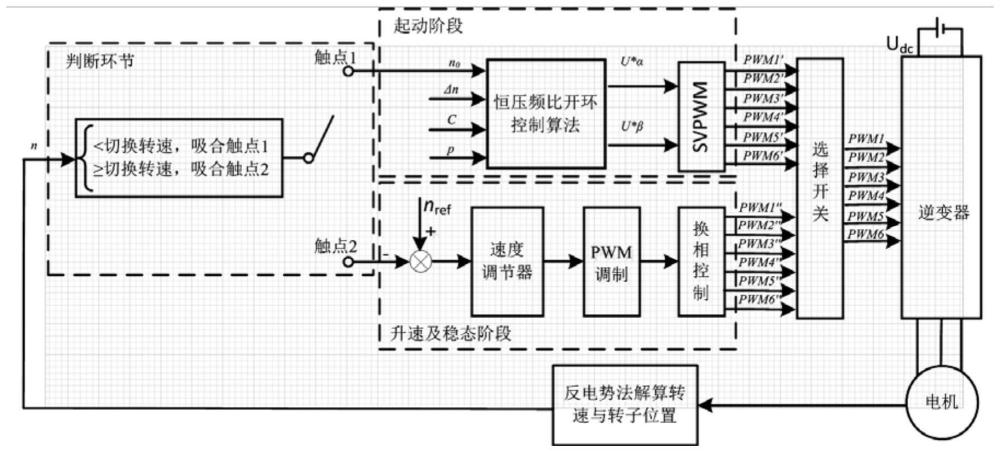
3、一种基于高压bldc与pmsm的无位置控制系统,包括:硬件采集模块、转速计算模块、转子位置预估模块、零低速开环起动模块和中高速闭环模块;
4、所述硬件采集模块连接至电动机三相输入端,用于采集电动机端电压,且根据电动机端电压计算端电压频率,将采集的端电压及端电压频率传递至转子位置预估模块;
5、所述转子位置预估模块用于检测端电压过零点从而预估转子位置,并将端电压频率和转子位置传递至转速计算模块;
6、所述转速计算模块根据端电压频率计算电动机运行转速,并根据电动机运行转速控制零低速开环起动模块或中高速闭环模块工作;
7、当运行转速低于切换转速时,零低速开环起动模块工作,以开环控制方式带动电动机转速达到切换转速;当运行转速达到切换转速时,中高速闭环模块工作,根据电动机运行转速和转子位置以三相六拍闭环控制方式控制电动机工作。
8、进一步,硬件采集模块通过三路采样电阻与分压电阻串联后星形连接并联至电动机三相输入端的方式采集电动机端电压;
9、采集后的端电压经调理电路后经跟随器输入至基准为0的滞环比较电路生成频率与端电压频率相同的方波信号。
10、一种基于高压bldc与pmsm的无位置控制方法,所述方法所述的系统实施,所述方法包括以下步骤:
11、步骤一:采集电动机端电压,并根据采集的端电压计算端电压频率;
12、步骤二:根据端电压频率计算电动机运行转速;
13、步骤三:判断电动机运行转速与切换转速的关系,当电动机运行转速低于切换转速时,进入步骤四,否则进入步骤五;
14、步骤四:以恒压频比开环控制方式控制电动机启动;
15、步骤五:以三相六拍闭环控制方式控制电动机运行。
16、进一步,所述切换转速为:5%~10%额定转速。
17、进一步,切换转速通过以下方法确定:以恒压频比开关控制方式控制电动机启动,并控制电动机转速逐渐升高,当计算得到的电动机运行转速波动范围不超过±50rpm,则判定此时电动机运行转速稳定,此时的电动机运行转速作为切换转速。
18、进一步,所述步骤四中,恒压频比开环控制方式具体步骤如下:
19、步骤四1:令ud=0,频率f初始化为1,uq=kf;k为压频比常数;
20、步骤四2:根据ud和uq进行反park变换,得到uα、uβ;
21、uα=udcosθ-uqsinθ
22、uβ=udsinθ+uqcosθ
23、θ=2πft,t为运算周期;
24、步骤四3:svpwm根据uα、uβ生成六路pwm波控制电动机运行;
25、步骤四4:控制uq和f同步增大,返回步骤四2直至电动机转速达到切换转速。
26、进一步,所述步骤四4中,在uq和f同步增大过程中控制uq与f的比值始终为k;
27、
28、un为电机额定相电压,fn为电机额定工作频率,c为1.2~1.9的常数;
29、c通过以下方法确定:令c=1.4控制电动机起动,待电动机正常运行后,调节c的大小,并采集观察电动机输入电流波形,选择输入电流波形中三相输入电流有效值最小时对应的c。
30、进一步,所述步骤五中,三相六拍闭环控制方式具体步骤如下:
31、步骤五1:估算转子位置;
32、步骤五2:将电动机运行转速与给定转速比较,得出偏差值,根据偏差值进行pi调节,得到电压占空比;
33、步骤五3:根据电压占空比和转子位置生成六路pwm波控制电动机运行。
34、进一步,所述步骤五1中,估算转子位置过程如下:
35、确定三相反电动势过零点;
36、将三相反电动势过零点延迟30°后作为三相的初步预估位置;
37、对三相的初步预估位置进行超前补偿后作为三相最终的预估位置;超前补偿范围为0°~30°。
38、本发明的有益效果:
39、与现有的技术相比,本发明的一种基于高压bldc与pmsm的无位置控制系统及方法,将无位置零低速阶段正弦波起动平滑稳定的优势与中高速阶段方波控制稳定性高的优势进行了融合,提高了系统的稳定性。此外,此种无位置控制技术在全转速段范围内可同时适用于bldc与pmsm,实现了其控制算法的通用化。
技术特征:
1.一种基于高压bldc与pmsm的无位置控制系统,其特征在于:所述系统包括:硬件采集模块、转速计算模块、转子位置预估模块、零低速开环起动模块和中高速闭环模块;
2.根据权利要求1所述的系统,其特征在于:硬件采集模块通过三路采样电阻与分压电阻串联后星形连接并联至电动机三相输入端的方式采集电动机端电压;
3.一种基于高压bldc与pmsm的无位置控制方法,所述方法基于前述任一权利要求所述的系统实施,其特征在于:所述方法包括以下步骤:
4.根据权利要求3所述的方法,其特征在于:
5.根据权利要求3所述的方法,其特征在于:切换转速通过以下方法确定:以恒压频比开关控制方式控制电动机启动,并控制电动机转速逐渐升高,当计算得到的电动机运行转速波动范围不超过±50rpm,则判定此时电动机运行转速稳定,此时的电动机运行转速作为切换转速。
6.根据权利要求5所述的方法,其特征在于:所述步骤四中,恒压频比开环控制方式具体步骤如下:
7.根据权利要求6所述的方法,其特征在于:所述步骤四4中,在uq和f同步增大过程中控制uq与f的比值始终为k;
8.根据权利要求7所述的方法,其特征在于:所述步骤五中,三相六拍闭环控制方式具体步骤如下:
9.根据权利要求8所述的方法,其特征在于:所述步骤五1中,估算转子位置过程如下:
技术总结
本发明属于电机控制技术领域,涉及一种基于高压BLDC与PMSM的无位置控制系统及方法,系统包括:硬件采集模块连接至电动机三相输入端,用于采集电动机端电压,且根据端电压计算端电压频率,将采集的端电压及端电压频率传递至转子位置预估模块;转子位置预估模块用于预估转子位置,转速计算模块根据端电压频率计算电动机运行转速,并根据电动机运行转速控制零低速开环起动模块或中高速闭环模块工作;当运行转速低于切换转速时,零低速开环起动模块工作,以开环控制方式带动电动机转速达到切换转速;当运行转速达到切换转速时,中高速闭环模块工作,根据电动机运行转速和转子位置以三相六拍闭环控制方式控制电动机工作。
技术研发人员:闫泽宇,房磊,涂文聪,张胜楠,王洋
受保护的技术使用者:陕西航空电气有限责任公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!