一种电机驱动的方法与流程
本发明属于电机控制,具体涉及一种电机驱动的方法。
背景技术:
1、通道闸是一种常见的安全控制设备,广泛应用于公共场所、商业建筑、机场、车站等地方。它可以通过电子控制系统实现对人员和车辆的进出管理,有效地保障了场所的安全和秩序。通道闸的种类有很多,常见的有三辊闸、摆臂闸、翼门闸等。三辊闸是一种比较经济实用的通道闸,适用于人员进出口;摆臂闸则更适合车辆进出口,因为它可以通过电动机驱动摆臂自动开启和关闭;翼门闸则是一种高档次的通道闸,外观美观大气,适用于高端商业建筑等场所。
2、现在的通道闸都是通过减速齿轮实现变速及增大驱动力矩功能,并依此实现精确定位控制。此方式因齿轮传动存在磨擦问题,长期使用会磨损,存在寿命短,噪声大的缺点。
技术实现思路
1、本发明的目的在于提供一种电机驱动的方法,直接通过电机驱动闸板运动,通过合理设计电机的极数、力矩等参数,使其可直接驱动闸板按预定要求运转,从而省去减速机的传动链,以解决上述背景技术中提出的问题。
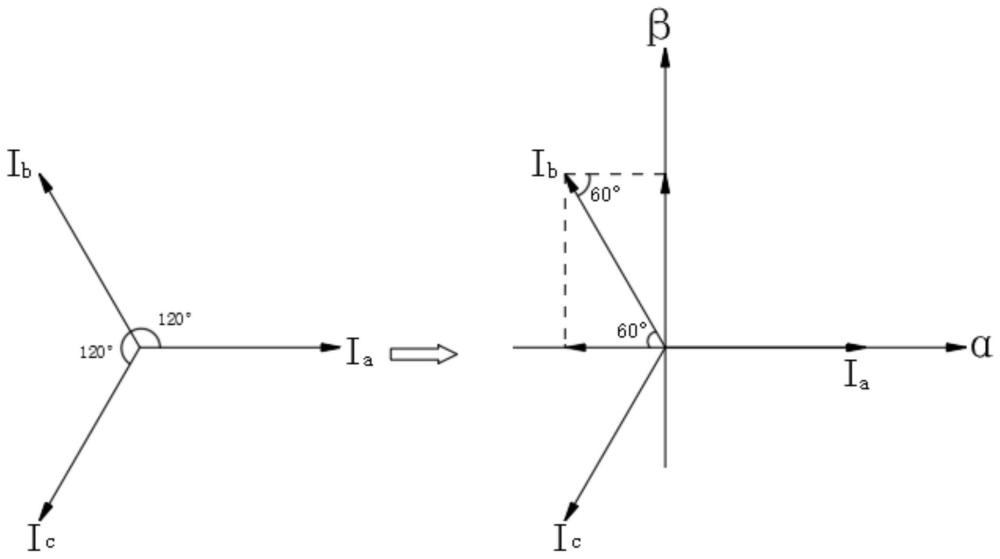
2、为实现上述目的,本发明采用了如下技术方案:一种电机驱动的方法,包括:将三相线相位差为120度的矢量进行抽象后,运用三角函数将其转换到两相的第一坐标系α-β上,并将所述第一坐标系α-β叠合在电机转子上;使用pid控制器分别控制所述第一坐标系α-β的两相,形成电流环;采用空间矢量脉冲宽度调制方式对所述电流环进行调节,判断获取合成的力矩转换作用时间;使用线形霍尔传感器采集所述电机转子位置信息,结合所述作用时间计算所述电机转子旋转过的角度,得到转速;将所述转速通过电机自检逻辑直接给定速度环,使所述电机转子分别向0°和180°方向转动,直到所述电机转子停止运动后标记两个方向的旋转限位位置,根据两个所述旋转限位位置确定中间位置;所述电机转子按照两个所述旋转限位位置和中间位置运动。
3、优选的,所述将三相线相位差为120度的矢量进行抽象后,运用三角函数将其转换到两相的第一坐标系α-β上,包括:
4、将ia、ib、ic变为iα、iβ;电流在a相输入时,iα电流直接等于ia电流,变换前乘以公式如下:
5、
6、获取第二坐标系d-q;
7、式中,ia、ib、ic为所述第二坐标系d-q中两两相差120°的三相电流,iα、iβ为分别为所述第一坐标系α-β中三相电流在αβ轴的分量。
8、优选的,所述将所述第一坐标系α-β叠合在电机转子上,包括:将所述第二坐标系d-q叠合在所述电机转子上,设定所述第二坐标系的d轴指向所述电机转子,所述第二坐标系d-q转动时与所述第一坐标系α-β的夹角θ为所述电机转子转动的电角度。
9、优选的,所述采用空间矢量脉冲宽度调制方式对所述电流环进行调节,判断获取合成的力矩转换作用时间,包括:推断出合成力矩所在扇区、以及tx、ty、tz所占比例;
10、其中,tx、ty、tz为作用在三相通电的时间。
11、优选的,所述推断出合成力矩所在扇区、以及tx、ty所占比例,包括:
12、
13、通过比较的符号得出所在扇区;
14、式中,ua、ub、为三相电压中a相和b相的电压,um为电压峰值,uα、uβ分别为相电压在αβ轴的分量。
15、优选的,所述
16、tx、ty的时间计算公式如下:
17、udc为输入电压直流分量。
18、优选的,所述判断合成的力矩转换作用时间,包括:在所述合成的力矩转换作用时间大于t时,进行i区调制,将超过边长t六边形且在半径为t的圆中的调制部分等比例拉回到六边形的直边上;在所述合成的力矩转换作用时间大于1.1547t时,进行ii区调制。
19、优选的,所述线形霍尔传感器设置为三组,且三组所述线形霍尔传感器间隔120度,输出三路正弦波信号。
20、优选的,所述使用线形霍尔传感器采集所述电机转子位置信息,包括:
21、当所述电机转子靠近所述线形霍尔传感器达到一定值时,其输出是导通状态,当所述电机转子级逐渐离开霍尔传感器,磁感应逐渐小时,其输出仍保存导通状态,在磁场转变为s极达到一定值时,其输出翻转为截止状态,此过程输出波形为sin波形的上半部,根据采样获得的电压信号得到所述电机转子具体的电角度;
22、在p对极的电机中,所述电机转子每旋转一圈,所述线形霍尔传感器产生p个周期的完整正弦波形,转换出的角度为:电角度=p倍机械角度;其中,p倍机械角度为电机实际转动的角度,p为电机的极对数。
23、本发明的技术效果和优点:本发明提出的一种电机驱动的方法,与现有技术相比,具有以下优点:
24、本发明中将三相线相位差为120度的矢量进行抽象后,运用三角函数将其转换到两相的第一坐标系α-β上,并将第一坐标系α-β叠合在电机转子上;使用pid控制器分别控制第一坐标系α-β的两相,形成电流环;采用空间矢量脉冲宽度调制方式对电流环进行调节,判断获取合成的力矩转换作用时间;使用线形霍尔传感器采集电机转子位置信息,结合作用时间计算电机转子旋转过的角度,得到转速;将转速通过电机自检逻辑直接给定速度环,使电机转子分别向0°和180°方向转动,直到电机转子停止运动后标记两个方向的旋转限位位置,根据两个旋转限位位置确定中间位置;电机转子按照两个旋转限位位置和中间位置运动,直接通过电机驱动闸板运动,通过合理设计电机的极数、力矩等参数,使其可直接驱动闸板按预定要求运转,从而省去减速机的传动链,可以降低成本,减小噪声及磨损问题。
技术特征:
1.一种电机驱动的方法,其特征在于,包括:
2.根据权利要求1所述的一种电机驱动的方法,其特征在于,所述将三相线相位差为120度的矢量进行抽象后,运用三角函数将其转换到两相的第一坐标系α-β上,包括:
3.根据权利要求2所述的一种电机驱动的方法,其特征在于,所述将所述第一坐标系α-β叠合在电机转子上,包括:将所述第二坐标系d-q叠合在所述电机转子上,设定所述第二坐标系的d轴指向所述电机转子,所述第二坐标系d-q转动时与所述第一坐标系α-β的夹角θ为所述电机转子转动的电角度。
4.根据权利要求3所述的一种电机驱动的方法,其特征在于,所述采用空间矢量脉冲宽度调制方式对所述电流环进行调节,判断获取合成的力矩转换作用时间,包括:推断出合成力矩所在扇区、以及tx、ty、tz所占比例;
5.根据权利要求4所述的一种电机驱动的方法,其特征在于,所述推断出合成力矩所在扇区、以及tx、ty所占比例,包括:
6.根据权利要求5所述的一种电机驱动的方法,其特征在于,所述
7.根据权利要求6所述的一种电机驱动的方法,其特征在于,所述判断合成的力矩转换作用时间,包括:在所述合成的力矩转换作用时间大于t时,进行i区调制,将超过边长t六边形且在半径为t的圆中的调制部分等比例拉回到六边形的直边上;在所述合成的力矩转换作用时间大于1.1547t时,进行i i区调制。
8.根据权利要求1所述的一种电机驱动的方法,其特征在于,所述线形霍尔传感器设置为三组,且三组所述线形霍尔传感器间隔120度,输出三路正弦波信号。
9.根据权利要求8所述的一种电机驱动的方法,其特征在于,所述使用线形霍尔传感器采集所述电机转子位置信息,包括:
技术总结
本发明属于电机控制技术领域,具体涉及一种电机驱动的方法,将三相线相位差为120度的矢量进行抽象后,运用三角函数将其转换到两相的第一坐标系α‑β上,并将所述第一坐标系α‑β叠合在电机转子上;使用PID控制器分别控制所述第一坐标系α‑β的两相,形成电流环;使所述电机转子分别向0°和180°方向转动,直到所述电机转子停止运动后标记两个方向的旋转限位位置,根据两个所述旋转限位位置确定中间位置;所述电机转子按照两个所述旋转限位位置和中间位置运动,直接通过电机驱动闸板运动,通过合理设计电机的极数、力矩等参数,使其可直接驱动闸板按预定要求运转,从而省去减速机的传动链,可以降低成本,减小噪声及磨损问题。
技术研发人员:黄朝钟,何荣良,柳腾赫,赵欣岩
受保护的技术使用者:深圳市捷顺科技实业股份有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!