一种自主清洁的光伏清洁机器人
本发明涉及清洁机器人,尤其涉及一种自主清洁的光伏清洁机器人。
背景技术:
1、太阳能光伏作为一种可再生清洁能源,已成为当今全球能源变革的重要力量。太阳能电池板表面容易积累风沙、灰尘等污垢,若没有及时科学专业的清洁,最高可导致组件发电功率衰减40%~60%,发电量下降20%~30%。因此,通过合理科学地清洁太阳能电池板以及对组件的悉心养护来提升电站发电量和效益的理念,受到业界认可。
2、现有的一种自主清洁的光伏清洁机器人(公开号:cn110919666a)至少有以下弊端:
3、上述专利在使用时,通过在相邻两个光伏板阵列之间的间隙通过桥面连接,光伏清洁机器人通过桥面实现光伏板阵列之间的连续清洁作业,由于以上专利中的机器人在光伏板上,没有通过限位机构进行限位,没有限位机构的机器人会在光伏板上乱窜,导致清洁效率降低,清洁结果不理想。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种自主清洁的光伏清洁机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种自主清洁的光伏清洁机器人,包括支架和固定安装于支架内壁的光伏板,所述支架相对两侧的外表面对称设置有两个传动箱,两个所述传动箱的内部均设置有张紧机构,所述张紧机构包括对称转动安装于传动箱底壁的两根立柱,两根所述立柱的底端均贯穿传动箱的下表面,并固定安装有转动臂,所述转动臂远离立柱一端的下表面转动安装有滚轮,其中一根所述立柱的顶端固定安装有第一驱动臂,另一根所述立柱的顶端固定安装有第二驱动臂,所述第一驱动臂和第二驱动臂远离立柱一端的上表面均固定安装有转轴,两根所述转轴之间铰接有连杆,所述第一驱动臂与第二驱动臂相互平行设置。
4、作为本发明的进一步方案,所述第一驱动臂和第二驱动臂的夹角为180°,所述连杆靠近第二驱动臂的上表面固定安装有驱动柱,所述驱动柱设置于连杆转动中心的上表面。
5、作为本发明的进一步方案,所述传动箱靠近第二驱动臂的底壁固定安装有电动伸缩杆,所述电动伸缩杆的伸缩端固定安装有驱动杆,所述驱动杆的上表面贯穿开设有驱动槽,所述驱动柱与驱动槽的内壁滑动安装。
6、作为本发明的进一步方案,两个所述传动箱相邻一侧的外表面均转动安装有一组履带轮,所述传动箱一侧的内壁固定安装有驱动电机,所述驱动电机的输出端贯穿传动箱的外表面,并与其中一个履带轮的转动中心固定安装。
7、作为本发明的进一步方案,两个所述传动箱相邻一侧的外表面之间对称固定安装有两根限位杆,两根所述限位杆之间固定安装有支板,所述支板与两个传动箱之间均转动安装有毛刷辊,所述毛刷辊的两端均贯穿传动箱的外表面,并固定安装有第一带轮,两组所述履带轮均贯穿传动箱的外表面,并固定安装有第二带轮,所述第一带轮和第二带轮的外表面套设有皮带。
8、作为本发明的进一步方案,所述支板设置于两根限位杆中间的位置,所述支板的内壁之间转动安装有两个支撑轮,其中一根所述限位杆的外表面设置有橡胶刮板。
9、作为本发明的进一步方案,两个所述传动箱的上表面固定安装有安装架,所述安装架的上表面固定安装有集尘箱,所述安装架的下表面固定安装有吸尘罩,所述吸尘罩设置于毛刷辊的上方。
10、作为本发明的进一步方案,所述集尘箱的两端通过气管与吸尘罩的内部相连通,所述集尘箱的上表面固定安装有吸尘泵,所述集尘箱一侧的外表面设置有门板。
11、与现有技术相比,本发明具有如下有益效果:
12、通过电动伸缩杆使驱动杆带动驱动槽伸出运动,驱动槽通过驱动柱带动第二驱动臂转动杆,使第二驱动臂通过立柱带动转动臂转动,通过转动臂带动滚轮紧紧的与支架的侧面抵上,同时第二驱动臂通过连杆带动第一驱动臂转动,使第一驱动臂带动另一个滚轮与支架的侧面相抵,通过本装置可以将清洁机器人限制在光伏板的指定位置,进行清洁清扫,避免机器人在光伏板上乱窜,提高了清洁效率,保证了清洁的效果。
技术特征:
1.一种自主清洁的光伏清洁机器人,包括支架(1)和固定安装于支架(1)内壁的光伏板(2),其特征在于,所述支架(1)相对两侧的外表面对称设置有两个传动箱(3),两个所述传动箱(3)的内部均设置有张紧机构,所述张紧机构包括对称转动安装于传动箱(3)底壁的两根立柱(30),两根所述立柱(30)的底端均贯穿传动箱(3)的下表面,并固定安装有转动臂(18),所述转动臂(18)远离立柱(30)一端的下表面转动安装有滚轮(16),其中一根所述立柱(30)的顶端固定安装有第一驱动臂(19),另一根所述立柱(30)的顶端固定安装有第二驱动臂(21),所述第一驱动臂(19)和第二驱动臂(21)远离立柱(30)一端的上表面均固定安装有转轴(22),两根所述转轴(22)之间铰接有连杆(20),所述第一驱动臂(19)与第二驱动臂(21)相互平行设置。
2.根据权利要求1所述的一种自主清洁的光伏清洁机器人,其特征在于,所述第一驱动臂(19)和第二驱动臂(21)的夹角为180°,所述连杆(20)靠近第二驱动臂(21)的上表面固定安装有驱动柱(23),所述驱动柱(23)设置于连杆(20)转动中心的上表面。
3.根据权利要求2所述的一种自主清洁的光伏清洁机器人,其特征在于,所述传动箱(3)靠近第二驱动臂(21)的底壁固定安装有电动伸缩杆(26),所述电动伸缩杆(26)的伸缩端固定安装有驱动杆(24),所述驱动杆(24)的上表面贯穿开设有驱动槽(25),所述驱动柱(23)与驱动槽(25)的内壁滑动安装。
4.根据权利要求1所述的一种自主清洁的光伏清洁机器人,其特征在于,两个所述传动箱(3)相邻一侧的外表面均转动安装有一组履带轮(15),所述传动箱(3)一侧的内壁固定安装有驱动电机(17),所述驱动电机(17)的输出端贯穿传动箱(3)的外表面,并与其中一个履带轮(15)的转动中心固定安装。
5.根据权利要求4所述的一种自主清洁的光伏清洁机器人,其特征在于,两个所述传动箱(3)相邻一侧的外表面之间对称固定安装有两根限位杆(11),两根所述限位杆(11)之间固定安装有支板(10),所述支板(10)与两个传动箱(3)之间均转动安装有毛刷辊(14),所述毛刷辊(14)的两端均贯穿传动箱(3)的外表面,并固定安装有第一带轮(27),两组所述履带轮(15)均贯穿传动箱(3)的外表面,并固定安装有第二带轮(28),所述第一带轮(27)和第二带轮(28)的外表面套设有皮带(29)。
6.根据权利要求5所述的一种自主清洁的光伏清洁机器人,其特征在于,所述支板(10)设置于两根限位杆(11)中间的位置,所述支板(10)的内壁之间转动安装有两个支撑轮(13),其中一根所述限位杆(11)的外表面设置有橡胶刮板(12)。
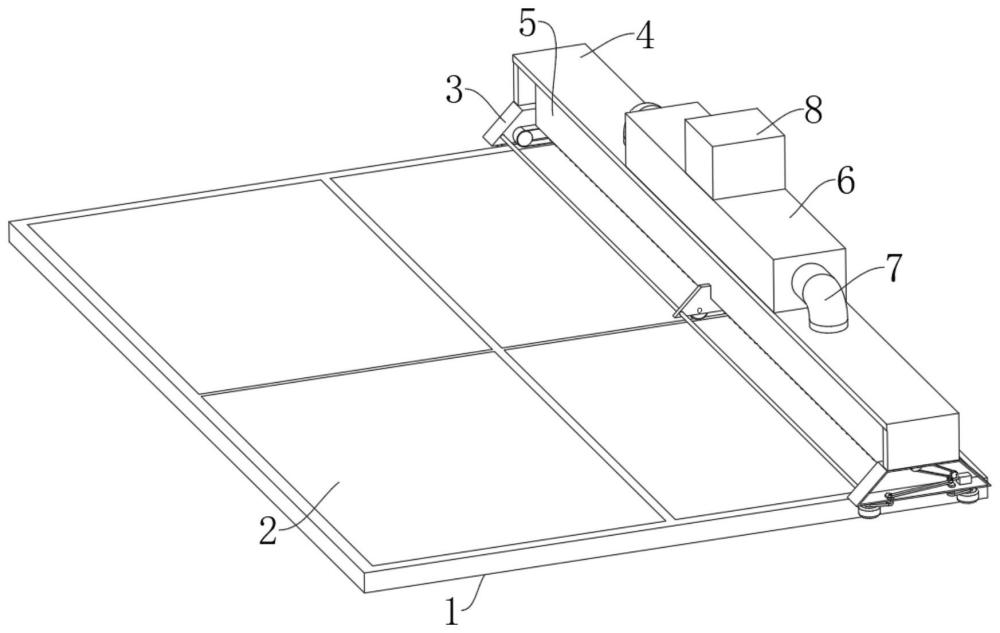
7.根据权利要求5所述的一种自主清洁的光伏清洁机器人,其特征在于,两个所述传动箱(3)的上表面固定安装有安装架(4),所述安装架(4)的上表面固定安装有集尘箱(6),所述安装架(4)的下表面固定安装有吸尘罩(5),所述吸尘罩(5)设置于毛刷辊(14)的上方。
8.根据权利要求7所述的一种自主清洁的光伏清洁机器人,其特征在于,所述集尘箱(6)的两端通过气管(7)与吸尘罩(5)的内部相连通,所述集尘箱(6)的上表面固定安装有吸尘泵(8),所述集尘箱(6)一侧的外表面设置有门板(9)。
技术总结
本发明涉及清洁机器人技术领域,公开了一种自主清洁的光伏清洁机器人,包括支架和固定安装于支架内壁的光伏板,所述支架相对两侧的外表面对称设置有两个传动箱,两个所述传动箱的内部均设置有张紧机构。本发明通过电动伸缩杆使驱动杆带动驱动槽伸出运动,驱动槽通过驱动柱带动第二驱动臂转动杆,使第二驱动臂通过立柱带动转动臂转动,通过转动臂带动滚轮紧紧的与支架的侧面抵上,同时第二驱动臂通过连杆带动第一驱动臂转动,使第一驱动臂带动另一个滚轮与支架的侧面相抵,通过本装置可以将清洁机器人限制在光伏板的指定位置,进行清洁清扫,避免机器人在光伏板上乱窜,提高了清洁效率,保证了清洁的效果。
技术研发人员:庞作伟,黎明和
受保护的技术使用者:浙江大学湖州研究院
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!