一种四环控制的LLC控制系统、方法与流程
本发明涉及车载电池快速充电,具体为一种四环控制的llc控制系统、方法。
背景技术:
1、随着现代工业的快速发展,新能源汽车的技术得到了快速的提升,在日益提升的电池容量下,对电池充电提出了快速、安全、高效、稳定的更高要求,但在传统的设计结构中,容易造成功率浪费的情况出现,导致其无法达成高效、稳定的充电的目的,如充电系统工作在额定电压的情况下将输出额定的电,但当充电系统工作在小于额定电压的情况下,充电系统将不会工作在最大功率的范畴内,此时将会减慢电动车的充电速度,就会造成功率的浪费,以及充电系统也无法稳定在一个恒定的工作状态中,在这种情况下,电车的充电安全性会受到极大的威胁。
2、另外,由于现代电动汽车超大电池容量的影响,新型的充电模块需要一个超宽范围的输出电压范围,而原有的传统设计无法达成这个目标,则原有的传统设计不仅极大的限制电池的充电范围,且会影响电池的容量,极大情况下影响电车的续航能力。
技术实现思路
1、针对上述问题,本发明提供了一种四环控制的llc控制系统、方法,其可保证电车可以快速、安全、高效、稳定地充电,并解决现有输出电压范围较窄、输出功率浪费的问题。
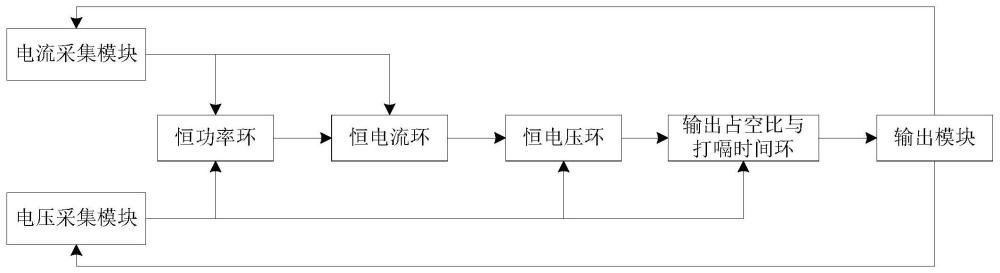
2、本发明采用如下技术方案,一种四环控制的llc控制系统,其包括电压采集模块、电流采集模块、输出模块,所述电压采集模块、电流采集模块均与所述输出模块连接,以分别对应采集所述输出模块输出的电压和电流信号;其特征在于,其还包括依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环,所述电流采集模块采集的信号数据同时输送至所述恒功率环、恒电流环,所述电压采集模块采集的信号数据同时输送至所述恒功率环、恒电压环、输出占空比与打嗝时间环,并将所述输出占空比与打嗝时间环的输出作为所述输出模块的输入给定,以达到稳定输出电压或电流。
3、进一步地,所述恒电流环、恒电压环均采用的2p2z补偿算法,以实现对接收的电压或电流信号进行稳定补偿;所述输出占空比与打嗝时间环采用的pi算法,用于减小pwm的输出占空比,以达到稳定输出;所述恒功率环采用的非线性算法,用于在接收不同信号数据时均进行恒定输出;
4、进一步地,根据车辆充电过程分为两种工作模式,分别为恒电压模式、恒电流模式;其中,当工作在恒电压模式时,通过依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环后输出恒定的电流,当工作在恒电流模式时,通过依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环后输出恒定的电压;
5、一种四环控制的llc控制方法,其特征在于:其包括:
6、布置依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环,且以所述恒功率环作为最外环、输出占空比与打嗝时间环作为最内环;
7、依据车辆充电工作模式,通过电压采集模块、电流采集模块对应获取当前周期下的实际输出电压或电流,当工作在恒电流模式时,将电流采集模块的输出电流同时送入所述恒功率环、恒电流环的控制器中以实现稳定电压,接着通过恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环的控制顺序,输出恒定的电压,从而实现稳定输出电压的闭环控制;
8、当工作在恒电压模式时,将电压采集模块的输出电压同时送入所述恒功率环、恒电压环、输出占空比与打嗝时间环的控制器中以实现稳定电压,接着通过恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环的控制顺序,输出恒定的电流,从而实现稳定输出电流的闭环控制。
9、进一步地,所述恒电流环、恒电压环的控制模型表达式均为:
10、u(n)=ka1u(n-1)+ka2u(n-2)+kb0e(n)+kb1e(n-1)+kb2e(n-2)
11、其中,
12、
13、
14、
15、
16、
17、z0(fz0)=2*π*fz0
18、z1(fz1)=2*π*fz1
19、p1(fp1)=2*π*fp1
20、fz0指第一个零点z0的频率;
21、fz1指第二个零点z1的频率;
22、fp1指第二个极点p1的频率;
23、fs指前一环输出的谐振频率;
24、kdc代表传递函数的增益;
25、u(n-1)为上次输出量;
26、u(n-2)为上上次输出量;
27、e(n)为本次误差量;
28、e(n-1)为上次误差量;
29、e(n-2)为上上次误差量;
30、ka1、ka2、kb0、kb1、kb2均表示不定系数;
31、进一步地,所述输出占空比与打嗝时间环的控制模型表达式为:
32、
33、
34、对表达式进行双线性变换后为:
35、
36、其中,kp为比例增量,ki为积分增量,kd指微分增量令;ts指采样时间;s指拉普拉斯中的复变量,z指双线性变换后的复变量;tz指采样频率。
37、本发明的有益效果是,其通过设置依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环,在这种控制方式下,能够解决现有输出电压范围较窄、输出功率浪费的问题,可在满足输出电压的条件下将会自适应输出电流,自动控制输出的功率以达到输出的稳定性,在满足输出电流的条件下,也会自适应输出电压,以达到自动控制输出的功率的目的,在这两者状态之间可以自适应输出的方式,减少了电车输出控制的复杂性,且通过环路的方式,能够让充电系统得以稳定的在输出较低的情况下运行,从而可以实现快速、安全、高效、稳定地充电,具有较好经济使用价值。
技术特征:
1.一种四环控制的llc控制系统,其包括电压采集模块、电流采集模块、输出模块,所述电压采集模块、电流采集模块均与所述输出模块连接,以分别对应采集所述输出模块输出的电压和电流信号;其特征在于,其还包括依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环,所述电流采集模块采集的信号数据同时输送至所述恒功率环、恒电流环,所述电压采集模块采集的信号数据同时输送至所述恒功率环、恒电压环、输出占空比与打嗝时间环,并将所述输出占空比与打嗝时间环的输出作为所述输出模块的输入给定,以达到稳定输出电压或电流。
2.根据权利要求1所述的一种四环控制的llc控制系统,其特征在于,所述恒电流环、恒电压环均采用的2p2z补偿算法,以实现对接收的电压或电流信号进行稳定补偿;所述输出占空比与打嗝时间环采用的pi算法,用于减小pwm的输出占空比,以达到稳定输出;所述恒功率环采用的非线性算法,用于在接收不同信号数据时均进行恒定输出。
3.根据权利要求1所述的一种四环控制的llc控制系统,其特征在于,根据车辆充电过程分为两种工作模式,分别为恒电压模式、恒电流模式;其中,当工作在恒电压模式时,通过依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环后输出恒定的电流,当工作在恒电流模式时,通过依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环后输出恒定的电压。
4.一种四环控制的llc控制方法,其特征在于:采用如权利要求1~3任一所述的一种四环控制的llc控制系统,所述方法包括:
5.根据权利要求4所述的一种四环控制的llc控制方法,其特征在于,所述恒电流环、恒电压环的控制模型表达式均为:
6.根据权利要求4所述的一种四环控制的llc控制方法,其特征在于,所述输出占空比与打嗝时间环的控制模型表达式为:
技术总结
本发明提供了一种四环控制的LLC控制系统、方法,其可保证电车可以快速、安全、高效、稳定地充电,并解决现有输出电压范围较窄、输出功率浪费的问题;其包括电压采集模块、电流采集模块、输出模块,所述电压采集模块、电流采集模块均与所述输出模块连接,以分别对应采集所述输出模块输出的电压和电流信号;其还包括依次连接的恒功率环、恒电流环、恒电压环、输出占空比与打嗝时间环,所述电流采集模块采集的信号数据同时输送至所述恒功率环、恒电流环,所述电压采集模块采集的信号数据同时输送至所述恒功率环、恒电压环、输出占空比与打嗝时间环,并将所述输出占空比与打嗝时间环的输出作为所述输出模块的输入给定,以达到稳定输出电压或电流。
技术研发人员:邱明,沈波,韩明洋
受保护的技术使用者:苏州新纽元电子技术有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!