一种电机模组及其控制方法与流程
本发明涉及电气工程领域,尤其涉及一种电机模组及其控制方法。
背景技术:
1、现在的手持电动工具,一般只是控制电机转动;在不同姿势、不同场景使用时,很难自动切换电机运动模式;电机的运动控制,特别是角度相关的控制能力也不强,不能很好的结合产品姿态信息,控制电机运动;一些工业自动控制领域虽然有类似功能的产品,但是体积大,成本高,用于手持工具不方便。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种电机模组及其控制方法:
2、一种电机模组:集成了电机、角度传感器、姿态传感器、控制器;角度传感器输出的转子角度,与姿态传感器输出的电机的空间姿态信息,控制器包括电机模组控制器、电机驱动电路;
3、一种电机模组的控制方法:可以直接高效的处理角度、坐标、方向等信息;结合这些信息控制运算,生成需要的运动目标,并控制电机执行目标;这种电机模组,响应快,计算效率高,体积小,成本低。
4、优选的,一种电机模组及其控制方法,其中,一种电机模组包括:
5、电机、控制器、角度传感器、姿态传感器;
6、其中,电机包括定子、转子,转子中心有电机轴;角度传感器包括编码盘、传感器;控制器包括电机模组控制器、电机驱动电路;
7、电机驱动电路与电机连接,并与电机模组控制器连接;
8、角度传感器的编码盘与转子的电机轴同轴固定;角度传感器的传感器位于靠近编码盘的位置,与定子相对固定,并与控制器连接;
9、姿态传感器与定子相对固定,并与控制器连接;
10、所述方法还包括:
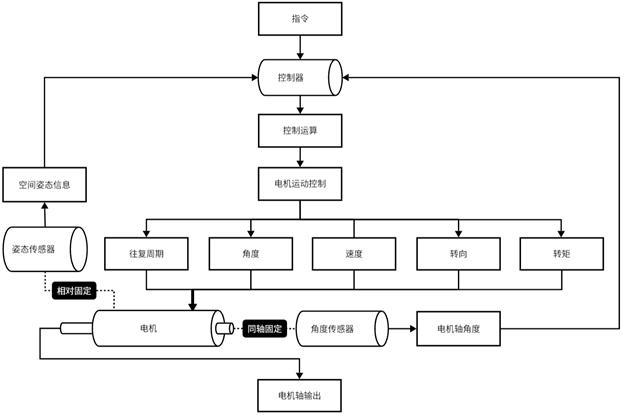
11、当一种电机模组需要工作时,控制器接受指令,以及角度传感器的信息、姿态传感器的信息;经过控制运算,生成中至少一个电机运动目标:启动、停止、转速、转矩、回转周期、旋转角度、电机轴相对电机的定子的角度位置,电机轴相对空间的角度位置;
12、通过电机驱动电路,控制电机执行目标运动。
13、优选的,所述姿态传感器至少包括一种传感器:倾角传感器、陀螺仪、地磁传感器。
14、优选的,所述方法还包括,电机的空间姿态信息的处理方法:
15、所述姿态传感器是倾角传感器,与电机的定子相对固定;控制器至少可以获得以下信息中的一项:
16、可以获得轴上固定的编码盘的零位的夹角信息;
17、可以获得电机相对水平面的倾角信息;
18、可以获得电机相对重力夹角信息:即+z与g的夹角或该夹角的计算值。
19、优选的,所述方法还包括,电机的空间姿态信息的处理方法:
20、所述姿态传感器是三轴以上的陀螺仪,陀螺仪与电机的定子相对固定;
21、定义编码盘零位对应的坐标方向为+z,地球引力的重力方向为g;
22、控制器至少可以获得以下信息中的一项:
23、可以获得电机所位于空间的x、y、z三个坐标方向;
24、可以获得电机相对重力夹角信息:即+z与g的夹角或该夹角的计算值;
25、可以获得角度传感器在空间坐标x-y、y-z、z-x三个平面上的投影。
26、优选的,所述方法包括,电机的空间姿态信息的处理方法:
27、所述姿态传感器是地磁传感器,地磁传感器与电机的定子相对固定;控制器至少可以获得以下信息中的一项:
28、可以获得电机旋转轴心相对与地球磁场n极方的夹角信息;
29、当电机在空间中整体转动时,可以连续获取的相交的n极方向,可以获取空间水平面信息;
30、当电机在空间中整体转动时,可以获得角度传感器在空间水平面上的投影。
31、优选的,所述方法还包括:
32、电机执行运动过程中,控制器持续获取角度传感器的信息、姿态传感器的信息;并根据这些实时更新的信息,补偿、纠正、维持、更新、改变电机执行目标,通过电机驱动电路,保障电机执行目标运动。
33、优选的,所述的角度传感器;其中的编码盘是圆柱形磁片,有n极、s极的磁极;电机轴的两端从电机中伸出,电机轴的一端固定编码盘。
34、优选的,所述的角度传感器;其中的编码盘是电机内部的永磁转子,转子上有磁体,磁体的n极、s极的交错排列。
35、优选的,所述电机是可以连续旋转电机;包括无刷电机、永磁同步电机或开关磁阻电机。
36、优选的,所述控制器包括的电机模组控制器、电机驱动电路;是具备电机能量回收功能的控制器。
37、与现有技术相比,本发明实施例具有以下有益效果:让小尺寸的手持电动工具可以辨识空间姿态、空间位置、空间角度,并能自动执行匹配的电机运动功能,包括所需的角度、速度、周期、转矩等输出。
技术特征:
1.一种电机模组及其控制方法,其特征在于,一种电机模组包括:
2.根据权利要求1,所述的一种电机模组及其控制方法,其特征在于,所述姿态传感器至少包括一种传感器:倾角传感器、陀螺仪、地磁传感器。
3.根据权利要求2,所述的一种电机模组及其控制方法,其特征在于,所述方法还包括,电机的空间姿态信息的处理方法:
4.根据权利要求2,所述的一种电机模组及其控制方法,其特征在于,所述方法还包括,电机的空间姿态信息的处理方法:
5.根据权利要求2,所述的一种电机模组及其控制方法,其特征在于,所述方法包括,电机的空间姿态信息的处理方法:
6.根据权利要求1,所述的一种电机模组及其控制方法,其特征在于,所述方法还包括:
7.根据权利要求1,所述的一种电机模组及其控制方法,其特征在于,所述的角度传感器;其中的编码盘是圆柱形磁片,有n极、s极的磁极;电机轴的两端从电机中伸出,电机轴的一端固定编码盘。
8.根据权利要求1,所述的一种电机模组及其控制方法,其特征在于,所述的角度传感器;其中的编码盘是电机内部的永磁转子,转子上有磁体,磁体的n极、s极的交错排列。
9.根据权利要求1,所述的一种电机模组及其控制方法,其特征在于,所述电机是可以连续旋转电机;包括无刷电机、永磁同步电机或开关磁阻电机。
10.根据权利要求1,所述的一种电机模组及其控制方法,其特征在于,所述控制器包括的电机模组控制器、电机驱动电路;是具备电机能量回收功能的控制器。
技术总结
本发明公开了一种电机模组及其控制方法,包括电机、控制器、角度传感器、姿态传感器;其中,电机包括定子、转子,转子中心有电机轴;角度传感器包括编码盘、传感器;控制器包括电机模组控制器、电机驱动电路;控制器分别与电机、角度传感器、姿态传感器连接,并获得电机的空间姿态信息;通过电机驱动电路来驱动电机运动,输出转向、转速、转矩、旋转角度等运动;用于智能电动牙刷、智能打磨机等手持电动工具,可以简化产品结构,改善产品性能。
技术研发人员:请求不公布姓名
受保护的技术使用者:陈方舟
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!