基于迟滞逆模型的压电陶瓷致动器前馈控制方法及系统
本申请涉及精密运动控制领域,特别是涉及一种基于迟滞逆模型的压电陶瓷致动器前馈控制方法及系统、计算机设备和存储介质。
背景技术:
1、随着纳米技术的不断发展,超精密机电一体化装备的功能实现对纳米尺度的运动精度要求越来越高。传统的电机驱动器已经无法满足这一要求,需要采用基于智能材料的新型致动器将电能或磁能转化为机械能。压电陶瓷致动器由于具备高位移分辨率、强驱动力、高刚度、大带宽和快速响应的优势而被广泛应用。然而,在实际控制中,压电陶瓷材料的迟滞非线性会导致系统的控制带宽降低,精度下降,甚至整个闭环系统变得不稳定。因此,当前的研究挑战在于设计有效的控制方法来补偿压电陶瓷致动器的迟滞非线性效应,以实现高速纳米精度的运动。
2、基于迟滞模型的前馈控制方法是解决这一问题的有效手段。该方法首先通过建模得到压电陶瓷致动器的迟滞模型,进而利用该迟滞模型的逆构成前馈控制器以补偿压电陶瓷致动器的输出位移,从而达到追踪期望位移的目的。与闭环控制相比,基于迟滞模型的前馈控制能够实现高带宽的精密运动控制,并且不存在稳定性方面的问题。
3、在基于模型的迟滞前馈控制器设计中,如何获得迟滞逆模型是关键一环。随着迟滞模型的复杂度逐渐提高,获得相应逆模型的难度也急剧增大。尽管自适应逆算法和逆乘结构的有效性已经得到了验证,但在实际应用中仍存在一系列问题。例如,逆乘结构需要将迟滞模型转化为特定的结构,在此基础上构建逆模型,导致设计过程复杂且通用性不强。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于迟滞逆模型的压电陶瓷致动器前馈控制方法及系统、计算机设备和存储介质。
2、第一方面,本发明实施例提出一种基于迟滞逆模型的压电陶瓷致动器前馈控制方法,所述方法包括:
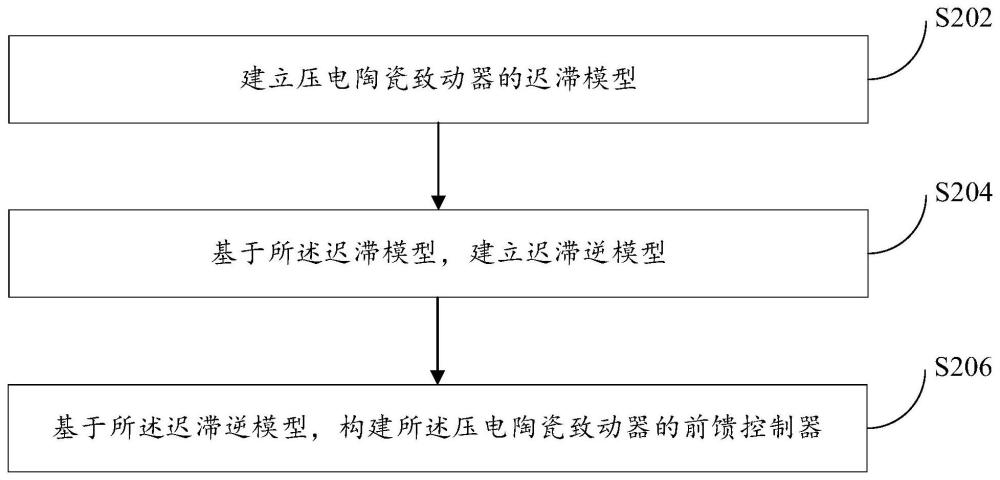
3、建立压电陶瓷致动器的迟滞模型;
4、基于所述迟滞模型,建立迟滞逆模型;所述迟滞逆模型包括高增益反馈回路和前馈通路,所述高增益反馈回路用于抑制所述压电陶瓷致动器的输出位移信号的迟滞非线性特征,所述前馈通路用于控制所述所述压电陶瓷致动器的输出位移信号与输入的期望位移信号相等,以实现迟滞补偿;
5、基于所述迟滞逆模型,构建所述压电陶瓷致动器的前馈控制器。
6、在一实施例中,所述基于所述迟滞模型,建立迟滞逆模型包括:
7、基于所述迟滞模型,建立所述高增益反馈回路;
8、基于所述高增益反馈回路,建立前馈通路;
9、基于所述高增益反馈回路和所述前馈通路,建立所述迟滞逆模型。
10、在一实施例中,所述基于所述迟滞模型,建立所述高增益反馈回路包括:
11、将迟滞模型分解为迟滞引入的扰动信号与线性环节组合的分解模型;
12、利用高增益控制模块和所述分解模型构成的环路,建立初始高增益反馈回路;所述高增益控制模块用于抑制扰动信号对于所述压电陶瓷致动器的输出位移信号的迟滞非线性的影响;
13、将所述初始高增益反馈回路中的分解模型复原,得到所述高增益反馈回路。
14、在一实施例中,所述基于所述迟滞模型,建立所述高增益反馈回路还包括:
15、在对迟滞模型进行参数辨识的过程中,将所述压电陶瓷致动器的输出位移信号的幅值进行归一化处理,使其与输入的期望位移信号的幅值相同。
16、在一实施例中,所述高增益控制模块的增益大于增益阈值。
17、在一实施例中,所述高增益控制模块的增益基于所述压电陶瓷致动器的控制精度所确定。
18、在一实施例中,所述高增益控制模块的输入端和输出端连接构成前馈通路,用于控制所述所述压电陶瓷致动器的输出位移信号、输入的期望位移信号以及所述迟滞模型的输出信号相等。
19、第二方面,本发明实施例提出一种基于迟滞逆模型的压电陶瓷致动器前馈控制系统,所述系统包括:
20、信号发生器,用于产生期望位移信号;
21、前馈控制器,包括迟滞逆模型,所述迟滞逆模型包括高增益反馈回路和前馈通路,所述高增益反馈回路用于抑制压电陶瓷致动器的输出位移信号的迟滞非线性特征,所述前馈通路用于控制所述所述压电陶瓷致动器的输出位移信号与输入的期望位移信号相等;
22、数模转换器,用于对前馈控制器的输出信号数模转换;
23、功率放大器,用于对数模转换后的输出信号进行放大处理,并输出至所述压电陶瓷致动器。
24、第三方面,本发明实施例提出一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行第一方面所述的步骤。
25、第四方面,本发明实施例提出一种计算机可读存储介质,其上存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面所述的步骤。
26、相比于现有技术,本申请具备以下技术效果:利用高增益反馈回路和前馈通路获得等效的迟滞逆模型,并由此构建压电陶瓷致动器的前馈控制器,能够大幅降低系统的复杂性、节省计算资源,保证前馈控制器设计的实时性,并且适用于所有迟滞模型。
技术特征:
1.一种基于迟滞逆模型的压电陶瓷致动器前馈控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述迟滞模型,建立迟滞逆模型包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述迟滞模型,建立所述高增益反馈回路包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述迟滞模型,建立所述高增益反馈回路还包括:
5.根据权利要求3所述的方法,其特征在于,所述高增益控制模块的增益大于增益阈值。
6.根据权利要求5所述的方法,其特征在于,所述高增益控制模块的增益基于所述压电陶瓷致动器的控制精度所确定。
7.根据权利要求2所述的方法,其特征在于,所述高增益控制模块的输入端和输出端连接构成前馈通路,用于控制所述所述压电陶瓷致动器的输出位移信号、输入的期望位移信号以及所述迟滞模型的输出信号相等。
8.一种基于迟滞逆模型的压电陶瓷致动器前馈控制系统,其特征在于,所述系统包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时,实现权利要求1至权利要求7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至权利要求7中任一项所述的方法的步骤。
技术总结
本申请涉及精密运动控制领域,特别是涉及一种基于迟滞逆模型的压电陶瓷致动器前馈控制方法及系统,所述方法包括:建立压电陶瓷致动器的迟滞模型;基于迟滞模型,建立迟滞逆模型;迟滞逆模型包括高增益反馈回路和前馈通路,高增益反馈回路用于抑制压电陶瓷致动器的输出位移信号的迟滞非线性特征,前馈通路用于控制压电陶瓷致动器的输出位移信号与输入的期望位移信号相等,以实现迟滞补偿;基于迟滞逆模型,构建压电陶瓷致动器的前馈控制器。本申请利用高增益反馈回路和前馈通路获得等效的迟滞逆模型,并由此构建压电陶瓷致动器的前馈控制器,能够大幅降低系统的复杂性、节省计算资源,适用于所有迟滞模型。
技术研发人员:杨琛,党超群,居冰峰
受保护的技术使用者:浙江大学杭州国际科创中心
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!