定虚拟轴高频脉振方波注入的转子初始位置检测方法与流程
本发明涉及转子初始位置检测,具体为定虚拟轴高频脉振方波注入的转子初始位置检测方法。
背景技术:
1、永磁同步电机由于具有结构简单、操作方便、可靠性高、易于控制等优势,在伺服驱动系统中得到了广泛的应用,特别是在工业机械臂、航空航天、数控机床等对电机性能和控制精度要求较高的领域,永磁同步电机又可分为表贴式和内置式,大多数表贴式永磁同步电机为隐极性电机,不适合采用无感foc高频信号注入的方式检测转子初始位置。
2、本专利提出了一种表贴式永磁同步电机转子初始位置检测方法,表贴式永磁同步电机不具有凸极效应,该方法利用到电机的饱和凸极效应,当虚拟轴定位到每一个角度,通过注入正负方波高频电压信号检测响应电流的大小,不同电角度会检测出不同大小的响应电流,故响应电流的大小包含了初始位置信息,该方法无需任何滤波器、锁相环,也没有过多的公式推导,方法实现流程简单,且适用于凸极性和隐极性电机。
技术实现思路
1、本发明的目的在于提供定虚拟轴高频脉振方波注入的转子初始位置检测方法,通过高频脉振方波电压注入方法,以解决上述背景技术中提出技术问题。
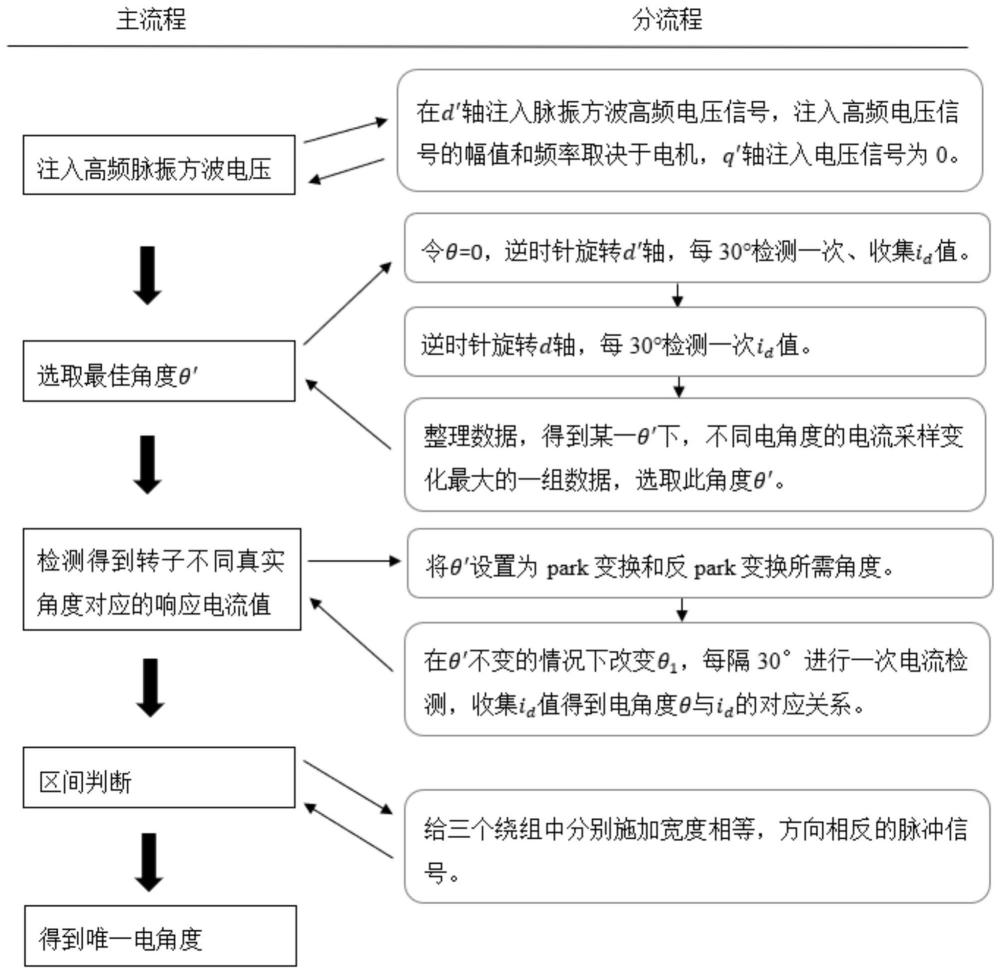
2、为实现上述目的,本发明提供如下技术方案:定虚拟轴高频脉振方波注入的转子初始位置检测方法,包括高频脉振方波注入模块、电机的电角度调节模块、检测模块和区间判断模块,所述在虚拟旋转坐标系的d'轴注入脉振方波高频电压信号,注入高频电压信号的幅值和频率取决于电机,q'轴注入电压为0;
3、
4、所述其中uq,ud分别是q轴,d轴的电压信号,n决定注入频率,um为注入信号的幅值。
5、优选的,所述α-β为两项静止坐标系,d-q称为旋转坐标系,d'-q'为虚拟旋转坐标系,其中设两项静止坐标系的α轴与虚拟旋转坐标系的d'轴的夹角为θ',转子n极指方向为旋转坐标系d轴方向,电机的电角度为θ,即α轴与d轴的夹角,机械角度用θ1表示,θ1=θ/p,p为极对数,转动电机,将电机的电角度θ调为0。
6、优选的,所述设置初始角度θ'=0,采集此时的d轴电流,夹角θ'逆时针旋转30°,采集一次d轴电流,直到虚拟轴旋转一周,θ'=330°时采样结束。
7、优选的,所述改变电机的电角度θ,逆时针旋转30°,重复权利要求3的步骤,将虚拟轴逆时针旋转一周,且每隔30°进行一次电流采样,直到电角度旋转一周θ=330°时电流采样结束。
8、优选的,所述整理采集到的电流样本,寻找每一个虚拟角度θ'下,不同机械角度的电流采样变化最大的一组数据,此时的虚拟角度便是最佳虚拟角度θ'。
9、优选的,所述将θ'设置为park变换和反park变换所需角度。
10、优选的,所述在θ'不变的情况下改变电机的θ1,每隔30°进行一次电流检测,收集id值,得到电角度θ与id的对应关系。
11、优选的,所述电机转子n极虽然不一定与定子绕组方向完全一致,但一定处于某绕组轴线区域,故给三个绕组中分别施加宽度相等,方向相反的脉冲信号,采集到响应电流最大的一组绕线方向就是转子指向区域,判断可将转子电角度θ缩减到0°-60°,配合前面定虚拟轴高频脉振方波注入可得出唯一电角度θ。
12、与现有技术相比,本发明的有益效果是:
13、本发明利用到电机的饱和凸极效应,可检测隐极性电机的转子位置,且无滤波、无可调参数、无复杂计算过程,高频信号注入让转子产生响应电流,转子的不同位置对应的响应电流值不同,因此响应电流也蕴含了转子的位置信息,再根据区间判断进一步缩减转子电角度所在区间,最终得出唯一的电角度信息。
技术特征:
1.定虚拟轴高频脉振方波注入的转子初始位置检测方法,包括高频脉振方波注入模块、电机的电角度调节模块、检测模块和区间判断模块,其特征在于:使用高频脉振方波注入模块向虚拟旋转坐标系的d'轴注入脉振方波高频电压信号,注入高频电压信号的幅值和频率取决于电机,q'轴注入电压为0;
2.根据权利要求1所述的定虚拟轴高频脉振方波注入的转子初始位置检测方法,其特征在于:所述α-β为两项静止坐标系,d-q称为旋转坐标系,d'-q'为虚拟旋转坐标系,其中设两项静止坐标系的α轴与虚拟旋转坐标系的d'轴的夹角为θ',转子n极指方向为旋转坐标系d轴方向,电机的电角度为θ,即α轴与d轴的夹角,机械角度用θ1表示,θ1=θ/p,p为极对数,转动电机,将电机的电角度θ调为0,电机的电角度调节模块能够对电机的电角度进行调节,每30°进行一次检测。
3.根据权利要求2所述的定虚拟轴高频脉振方波注入的转子初始位置检测方法,其特征在于:所述设置初始角度θ'=0,采集此时的d轴电流,夹角θ'逆时针旋转30°,采集一次d轴电流,直到虚拟轴旋转一周,θ'=330°时采样结束。
4.根据权利要求2所述的定虚拟轴高频脉振方波注入的转子初始位置检测方法,其特征在于:所述改变电机的电角度θ,逆时针旋转30°,重复权利要求3的步骤,将虚拟轴逆时针旋转一周,且每隔30°进行一次电流采样,直到电角度旋转一周θ=330°时电流采样结束。
5.根据权利要求2所述的定虚拟轴高频脉振方波注入的转子初始位置检测方法,其特征在于:所述整理采集到的电流样本,寻找每一个虚拟角度θ'下,不同机械角度的电流采样变化最大的一组数据,此时的虚拟角度便是最佳虚拟角度θ',通过电机的电角度调节模块不断的改变电机的电角度θ,每调节30°进行一次检测,且在电机的电角度θ当前角度时,虚拟轴旋转一周,且每调节30°,便采集一次d轴电流,将采集到的电流样本进行整理,便能够得到最佳虚拟角度θ'。
6.根据权利要求2所述的定虚拟轴高频脉振方波注入的转子初始位置检测方法,其特征在于:所述将θ'设置为park变换和反park变换所需角度。
7.根据权利要求2所述的定虚拟轴高频脉振方波注入的转子初始位置检测方法,其特征在于:所述在θ'不变的情况下改变电机的θ1,每隔30°进行一次电流检测,收集id值,得到电角度θ与id的对应关系,检测模块是为了检测θ'不变的情况,电机的θ1每隔30°的id值,进行对比,得出电角度θ与id的对应关系。
8.根据权利要求1所述的定虚拟轴高频脉振方波注入的转子初始位置检测方法,其特征在于:所述电机转子n极虽然不一定与定子绕组方向完全一致,但一定处于某绕组轴线区域,故给三个绕组中分别施加宽度相等,方向相反的脉冲信号,采集到响应电流最大的一组绕线方向就是转子指向区域,判断可将转子电角度θ缩减到0°-60°,配合前面定虚拟轴高频脉振方波注入可得出唯一电角度θ,区间判断模块是为了判断,在给三个绕组中分别施加宽度相等,方向相反的脉冲信号后,响应电流最大的绕组方向就是转子指向区域,这时能够通过区间判断模块将转子电角度θ的范围缩减到0°-60°,根据定虚拟轴高频脉振方波注入的方法,便能够判断出唯一电角度θ具体数值。
技术总结
本发明公开了定虚拟轴高频脉振方波注入的转子初始位置检测方法,包括高频脉振方波注入模块、电机的电角度调节模块、检测模块和区间判断模块,所述在虚拟旋转坐标系的d'轴注入脉振方波高频电压信号,注入高频电压信号的幅值和频率取决于电机,q'轴注入电压为0。本发明利用到电机的饱和凸极效应,可检测隐极性电机的转子位置,且无滤波、无可调参数、无复杂计算过程,高频信号注入让转子产生响应电流,转子的不同位置对应的响应电流值不同,因此响应电流也蕴含了转子的位置信息,再根据区间判断进一步缩减转子电角度所在区间,最终得出唯一的电角度信息。
技术研发人员:李瑜,夏亮,谭先锋,曹祥,魏章保
受保护的技术使用者:重庆智能机器人研究院
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!