一种光伏组件倾角调节方法和调节系统与流程
本发明涉及光伏组件倾角调节,尤其涉及一种光伏组件倾角调节方法和调节系统。
背景技术:
1、柔性支架是一种两端固定,由预应力柔性索结构形成的大跨度光伏组件支撑结构,具有高净空、大跨距的特点,在成本及环境适应性方面具有独特的经济和技术优势,目前已逐步推广应用。
2、由于跨的两个端部有钢结构限制位移,而跨中部悬空且柔性跟踪跨度较长,加上跨中部的光伏组件由于风载荷的不均匀分布和风压的作用,以及柔性索的固有特性,使得跨中部的光伏组件的实际跟踪角度与理论最佳跟踪角度存在偏差,导致光伏组件对太阳能的利用率降低,使光伏组件的发电量减少。
3、因此,如何提高光伏组件的发电量,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种光伏组件倾角调节方法,以提高光伏组件的发电量。
2、为了实现上述目的,本发明提供了如下技术方案:
3、一种光伏组件倾角调节方法,应用于柔性跟踪系统,所述柔性跟踪系统包括多个柔性子系统,所述柔性子系统包括驱动机构,所述调节方法包括以下步骤:
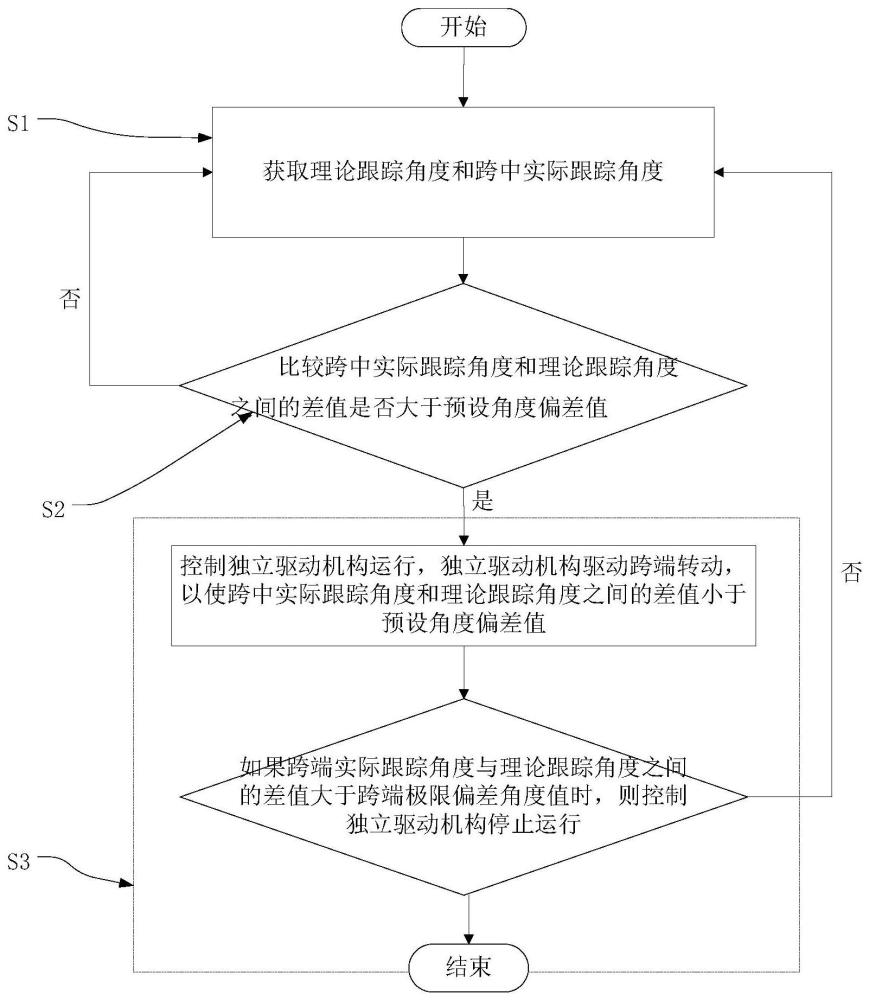
4、s1:获取理论跟踪角度和跨中实际跟踪角度;
5、s2:比较所述跨中实际跟踪角度和所述理论跟踪角度,如果所述跨中实际跟踪角度和所述理论跟踪角度之间的差值大于预设角度偏差值,则执行步骤s3,否则返回步骤s1;
6、s3:控制所述驱动机构运行,所述驱动机构驱动跨端转动,以使所述跨中实际跟踪角度和所述理论跟踪角度之间的差值小于所述预设角度偏差值。
7、可选地,在上述光伏组件倾角调节方法中,在所述步骤s2中,如果所述跨中实际跟踪角度和所述理论跟踪角度之间的差值大于预设角度偏差值,且所述跨中实际跟踪角度小于所述理论跟踪角度,则在所述步骤s3中,控制所述驱动机构运行,所述驱动机构驱动跨端沿第一方向转动,调大跨端部的跨端跟踪角度;
8、在所述步骤s2中,如果所述跨中实际跟踪角度和所述理论跟踪角度之间的差值大于预设角度偏差值,且所述跨中实际跟踪角度大于所述理论跟踪角度,则在所述步骤s3中,控制所述驱动机构运行,所述驱动机构驱动跨端沿第二方向转动,所述第二方向为所述第一方向的反方向,调小跨端部的跨端跟踪角度。
9、可选地,在上述光伏组件倾角调节方法中,所述步骤s1还包括:获取跨端极限偏差角度值和跨端实际跟踪角度;
10、在所述步骤s3中,如果所述跨端实际跟踪角度与所述理论跟踪角度之间的差值大于所述跨端极限偏差角度值时,则控制所述驱动机构停止运行。
11、可选地,在上述光伏组件倾角调节方法中,所述理论跟踪角度、所述预设角度偏差值和所述跨端极限偏差角度值通过预先接收和存储方式获得;
12、和/或,所述跨端实际跟踪角度和所述跨中实际跟踪角度分别通过跨端跨中角度检测元件和跨中跨中角度检测元件检测获得。
13、一种光伏组件倾角调节系统,应用如上所述的光伏组件倾角调节方法,所述光伏组件倾角调节系统包括:
14、第一控制器,预先接收并存储理论跟踪角度和预设角度偏差值;
15、驱动机构,与所述第一控制器信号连接,用于调节跨端部的跨端跟踪角度;
16、跨中角度检测元件,设置于跨中部,用于检测跨中部的跨中实际跟踪角度,且所述跨中角度检测元件与所述第一控制器信号连接。
17、可选地,在上述光伏组件倾角调节系统中,所述第一控制器还预先接收并存储跨端极限偏差角度值;
18、所述光伏组件倾角调节系统还包括跨端角度检测元件,所述跨端角度检测元件设置于跨端部,用于检测跨端部的跨端实际跟踪角度,且所述跨端实际跟踪角度与所述第一控制器信号连接。
19、可选地,在上述光伏组件倾角调节系统中,所述驱动机构包括整排光伏组件两端的第一驱动机构,所述第一驱动机构包括:
20、支撑门架;
21、第一旋转梁,转动设置于所述支撑门架上,且所述第一旋转梁的两端设置安装部,用于安装柔性索;
22、第一推动件,与所述第一旋转梁连接,用于推动所述第一旋转梁转动。
23、可选地,在上述光伏组件倾角调节系统中,两个所述第一驱动机构之间设置第二驱动机构;
24、其中,所述第二驱动机构包括:
25、支撑柱;
26、第二旋转梁,转动设置于所述支撑柱上,且所述第二旋转梁的两端设置安装部,用于安装柔性索;
27、第二推动件,与所述第二旋转梁的一端转动连接,用于推动所述第一旋转梁转动。
28、可选地,在上述光伏组件倾角调节系统中,所述第一推动件和所述第二推动件通过凸轮传动机构、曲柄推杆机构、齿轮齿条传动或者丝杠螺母传动实现对第一旋转梁和第二旋转梁的推动。
29、可选地,在上述光伏组件倾角调节系统中,所述第一推动件和所述第二推动件采用液压推杆、气压推杆或者电动推杆。
30、可选地,在上述光伏组件倾角调节系统中,所述第一旋转梁的两端设置转动件,所述支撑门架上设置有用于对所述转动件进行导向的转动导向件。
31、可选地,在上述光伏组件倾角调节系统中,所述支撑门架背离光伏组件的一侧设置斜拉桩,所述斜拉桩和所述支撑门架之间通过斜拉件连接。
32、应用本发明所提供的光伏组件倾角调节方法时,当柔性子系统跨中部的跨中实际跟踪角度与理论跟踪角度之间的差值大于预设角度偏差值,控制驱动机构运行,驱动机构驱动跨端转动,以跨中也相应转动,柔性子系统的倾角得到调整,从而使跨中实际跟踪角度与理论跟踪角度之间的差值小于跟踪角度极限偏差值,提高光伏组件对太阳能的追踪能力和利用率,提高光伏组件的发电量。
技术特征:
1.一种光伏组件倾角调节方法,其特征在于,应用于柔性跟踪系统,所述柔性跟踪系统包括多个柔性子系统,所述柔性子系统包括驱动机构,所述调节方法包括以下步骤:
2.根据权利要求1所述的光伏组件倾角调节方法,其特征在于,在所述步骤s2中,如果所述跨中实际跟踪角度和所述理论跟踪角度之间的差值大于预设角度偏差值,且所述跨中实际跟踪角度小于所述理论跟踪角度,则在所述步骤s3中,控制所述驱动机构运行,所述驱动机构驱动跨端沿第一方向转动,调大跨端部的跨端跟踪角度;
3.根据权利要求1所述的光伏组件倾角调节方法,其特征在于,所述步骤s1还包括:获取跨端极限偏差角度值和跨端实际跟踪角度;
4.根据权利要求3所述的光伏组件倾角调节方法,其特征在于,所述理论跟踪角度、所述预设角度偏差值和所述跨端极限偏差角度值通过预先接收和存储方式获得;
5.一种光伏组件倾角调节系统,其特征在于,应用如权利要求1至4任意一项所述的光伏组件倾角调节方法,所述光伏组件倾角调节系统包括:
6.根据权利要求5所述的光伏组件倾角调节系统,其特征在于,所述第一控制器还预先接收并存储跨端极限偏差角度值;
7.根据权利要求5所述的光伏组件倾角调节系统,其特征在于,所述驱动机构包括整排光伏组件两端的第一驱动机构,所述第一驱动机构包括:
8.根据权利要求7所述的光伏组件倾角调节系统,其特征在于,两个所述第一驱动机构之间设置第二驱动机构;
9.根据权利要求8所述的光伏组件倾角调节系统,其特征在于,所述第一推动件和所述第二推动件通过凸轮传动机构、曲柄推杆机构、齿轮齿条传动或者丝杠螺母传动实现对第一旋转梁和第二旋转梁的推动。
10.根据权利要求9所述的光伏组件倾角调节系统,其特征在于,所述第一推动件和所述第二推动件采用液压推杆、气压推杆或者电动推杆。
11.根据权利要求7所述的光伏组件倾角调节系统,其特征在于,所述第一旋转梁的两端设置转动件,所述支撑门架上设置有用于对所述转动件进行导向的转动导向件。
12.根据权利要求7所述的光伏组件倾角调节系统,其特征在于,所述支撑门架背离光伏组件的一侧设置斜拉桩,所述斜拉桩和所述支撑门架之间通过斜拉件连接。
技术总结
本发明公开了一种光伏组件倾角调节方法和调节系统。该光伏组件倾角调节方法应用于柔性跟踪系统,柔性跟踪系统包括多个柔性子系统,柔性子系统包括驱动机构,该调节方法包括步骤:S1:获取理论跟踪角度和跨中实际跟踪角度;S2:比较跨中实际跟踪角度和理论跟踪角度,如果跨中实际跟踪角度和理论跟踪角度之间的差值大于预设角度偏差值,则执行步骤S3,否则返回步骤S 1;S3:控制驱动机构运行,驱动机构驱动跨端转动,以使跨中实际跟踪角度和理论跟踪角度之间的差值小于预设角度偏差值。
技术研发人员:刘星洲,张立兵,左乐,夏登福,解小勇
受保护的技术使用者:仁卓智能科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!