一种机器人供电电路及装置的制作方法
本发明涉及机器人,尤其涉及一种机器人供电电路及装置。
背景技术:
1、随着机器人技术的发展,机器人的应用范围越来越广。在医疗领域,通常使用手术机器人来辅助和执行手术。现有的手术机器人通常采用市电供电,然而市电供电方案繁琐,隔离变压器和电池供电回路等元器件占地空间较大,导致手术机器人的维护成本升高。因此,如何简化手术机器人的供电电路成为亟需解决的问题。
技术实现思路
1、本发明提供了一种机器人供电电路及装置,以解决现有的手术机器人供电方案繁琐导致成本较高的问题。
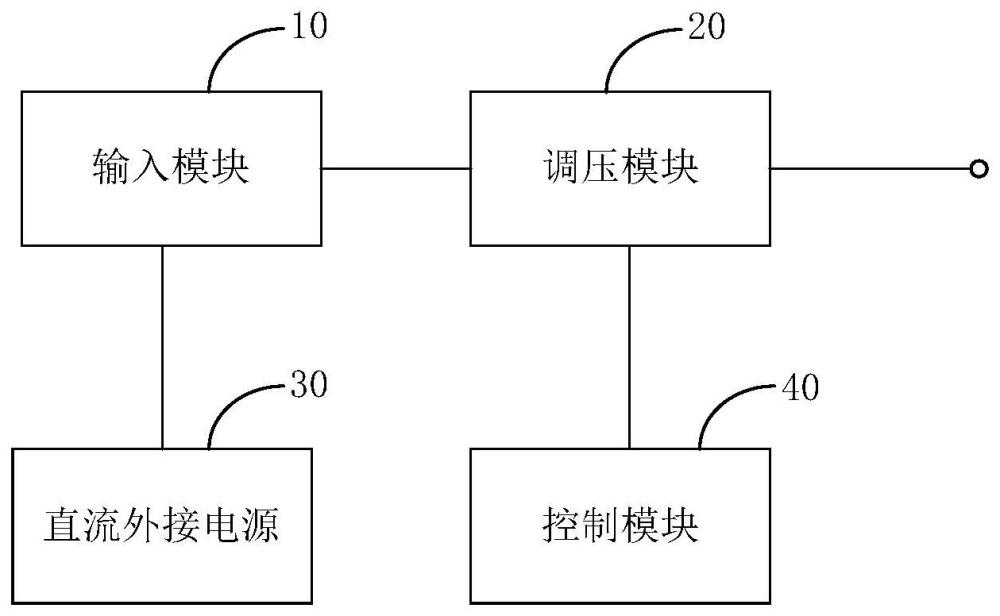
2、根据本发明的一方面,提供了一种机器人供电电路,包括:
3、输入模块,所述输入模块用于连接直流外接电源,并输出第一电压信号;
4、调压模块,所述调压模块与所述输入模块连接,所述调压模块用于连接机器人,所述调压模块还用于在导通时对所述第一电压信号进行调节,并输出第二电压信号和第三电压信号;
5、控制模块,所述控制模块与所述调压模块连接,所述控制模块用于控制所述调压模块的导通状态;
6、其中,所述第二电压信号用于向所述机器人的立柱升降关节模组、被动臂关节和主动臂关节供电,所述第三电压信号用于向所述机器人的单臂采集板和器械驱动模块供电,所述第一电压信号与所述第二电压信号的幅值相等。
7、可选的,输入模块,包括:
8、开关单元和滤波单元;
9、所述开关单元连接于所述直流外接电源与所述滤波单元之间,所述开关单元用于将所述直流外接电源与所述滤波单元导通;
10、所述滤波单元与所述调压模块连接,所述滤波单元用于在所述开关单元导通时获取所述直流外接电源的所述第一电压信号,并对所述第一电压信号进行滤波处理。
11、可选的,开关单元,包括:
12、航空插头、第一指示灯、第一开关和第二指示灯;
13、所述航空插头与所述直流外接电源连接,所述第一开关连接于所述航空插头与所述滤波单元之间,所述第一指示灯与所述航空插头连接,所述第二指示灯与所述第一开关连接;
14、所述航空插头用于接入所述直流外接电源,所述第一指示灯用于在所述航空插头接入所述直流外接电源时发光,所述第一开关用于在导通时将所述直流外接电源与所述滤波单元导通,所述第二指示灯用于在所述直流外接电源与所述滤波单元导通时发光。
15、可选的,滤波单元,包括:
16、第一接触器、断路器和第一滤波器;
17、所述第一接触器与所述开关单元连接,所述断路器连接于所述第一接触器与所述第一滤波器之间,所述第一滤波器与所述调压模块连接;
18、所述第一接触器用于导通,使所述第一电压信号输出至所述第一滤波器,所述断路器用于短路保护,所述第一滤波器用于对所述第一电压信号进行滤波处理。
19、可选的,调压模块,包括:
20、第一调压单元和第二调压单元;
21、所述第一调压单元连接于所述输入模块和所述机器人之间,所述第一调压单元还与所述机器人连接,所述第一调压单元用于在导通时对滤波后的所述第一电压信号进行调节,并输出第二电压信号;
22、所述第二调压单元连接于所述输入模块和所述机器人之间,所述第二调压单元还与所述机器人连接,所述第二调压单元用于在导通时对滤波后的所述第一电压信号进行调节,并输出第三电压信号。
23、可选的,第一调压单元,包括:
24、第二接触器和第一开关电源;
25、所述第二接触器连接于所述输入模块与所述第一开关电源之间,所述第二接触器用于导通,使滤波后的所述第一电压信号输出至所述第一开关电源;
26、所述第一开关电源与所述机器人连接,所述第一开关电源用于对滤波后的所述第一电压信号进行调节,并输出第二电压信号。
27、可选的,第二调压单元,包括:
28、第三接触器、第二开关电源和第二滤波器;
29、所述第三接触器连接于所述输入模块与所述第二开关电源之间,所述第三接触器用于导通,使滤波后的所述第一电压信号输出至所述第二开关电源;
30、所述第二开关电源与所述第二滤波器连接,所述第二开关电源用于对滤波后的所述第一电压信号进行调节,并输出第三电压信号;
31、所述第二滤波器连接于所述第二开关电源与所述机器人之间,所述第二滤波器用于对所述第三电压信号进行滤波处理。
32、可选的,控制模块,包括:
33、控制单元,所述控制单元与所述第一调压单元和所述第二调压单元连接,所述控制单元用于控制所述第一调压单元和所述第二调压单元的导通状态,所述控制单元还用于与所述机器人进行通讯。
34、可选的,滤波单元,还包括:
35、第二开关,所述第二开关与所述第一接触器连接,所述第二开关用于在导通时控制所述第一接触器断开。
36、第二方面,本发明实施例提供一种机器人供电装置,包括上述任一项的机器人供电电路。
37、本发明实施例的机器人供电电路包括输入模块、调压模块和控制模块。调压模块与所述输入模块连接,控制模块与所述调压模块连接。输入模块用于连接直流外接电源,并输出第一电压信号。调压模块用于连接机器人,并在导通时对所述第一电压信号进行调节,输出第二电压信号向所述机器人的立柱升降关节模组、被动臂关节和主动臂关节供电,输出第三电压信号向所述机器人的单臂采集板和器械驱动模块供电。控制模块用于控制所述调压模块的导通状态。本发明实施例的技术方案通过设置输入模块与直流外接电源连接,输出直流的第一电压信号,进而通过调压模块向机器人供电,实现了简化电路,降低成本的效果。
38、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人供电电路,其特征在于,包括:
2.根据权利要求1所述的机器人供电电路,其特征在于,所述输入模块,包括:
3.根据权利要求2所述的机器人供电电路,其特征在于,所述开关单元,包括:
4.根据权利要求2所述的机器人供电电路,其特征在于,所述滤波单元,包括:
5.根据权利要求1所述的机器人供电电路,其特征在于,所述调压模块,包括:
6.根据权利要求5所述的机器人供电电路,其特征在于,所述第一调压单元,包括:
7.根据权利要求5所述的机器人供电电路,其特征在于,所述第二调压单元,包括:
8.根据权利要求5所述的机器人供电电路,其特征在于,所述控制模块,包括:
9.根据权利要求4所述的机器人供电电路,其特征在于,所述滤波单元,还包括:
10.一种机器人供电装置,其特征在于,包括权利要求1-9任一项所述的机器人供电电路。
技术总结
本发明公开一种机器人供电电路及装置。本发明实施例的机器人供电电路包括输入模块,用于连接直流外接电源,并输出第一电压信号;调压模块与输入模块连接,调压模块用于连接机器人,调压模块还用于在导通时对第一电压信号进行调节,并输出第二电压信号和第三电压信号;控制模块与调压模块连接,控制模块用于控制调压模块的导通状态;其中,第二电压信号用于向机器人的立柱升降关节模组、被动臂关节和主动臂关节供电,第三电压信号用于向机器人的单臂采集板和器械驱动模块供电,第一电压信号与第二电压信号的幅值相等。本发明的技术方案通过设置输入模块与直流外接电源连接,进而通过调压模块向机器人供电,实现了简化电路,降低成本的效果。
技术研发人员:纪洋洋,杨国旗,谭琴,张计悦,梁云雷,苏衍宇
受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!