推杆电机带载电流值安全行程控制方法及控制系统与流程
本发明涉及电机控制方法及系统领域,特别是涉及一种推杆电机带载电流值安全行程控制方法及控制系统。
背景技术:
1、推杆电机在很多智能家居场景均有使用,在对推杆电机进行限位时,往往采用接近传感器感知推杆伸缩,或者通过霍尔传感器记录电机转动圈数推算推杆伸缩长度,上述控制往往使得推杆电机的行程为固定行程。
2、具体应用场景之一的电动摇椅,其在使用过程中对需要摇摆范围进行限位,现有技术做出保护的解决方案中,如采用压力传感器的电动摇椅,通常是在程序中预设固定行程的限定值,这就导致了现有摇椅无法自主调整限定值;一方面对不同摇椅产品是存在结构差异的话,就无法预设不同的安全限值;另一方面针对同一种结构产品,负载不同的情况下,就无法设置不同的安全限值;并且传统的压力传感器由于灵敏度有限,抗干扰差等问题,导致程序的安全限定值的不准确。
3、基于上述问题,亟需设计一种推杆电机带载电流值安全行程控制方法及控制系统。
技术实现思路
1、为了解决背景技术中提及的技术问题,本发明提供了一种推杆电机带载电流值安全行程控制方法及控制系统、电动摇椅控制系统、可读的存储介质。
2、本发明提供了一种电机带载电流值安全行程控制方法,包括以下步骤:
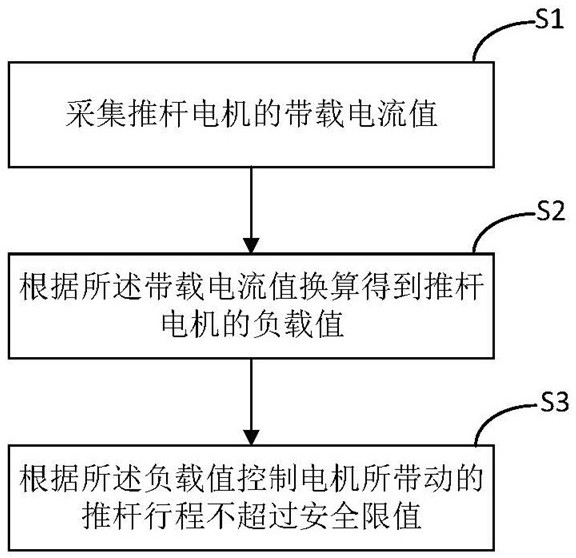
3、步骤 s1,采集推杆电机的带载电流值;
4、步骤 s2,根据所述带载电流值换算得到推杆电机的负载值;以及
5、步骤 s3,根据所述负载值控制电机所带动的推杆行程不超过安全限值。
6、另一方面,本发明提供一种推杆电机带载电流值安全行程控制系统,包括:
7、电流检测模块,采集推杆电机的带载电流值;霍尔检测模块,用于检测推杆电机的转动圈数,确定电机的推杆长度;电机驱动模块,用于驱动推杆电机转动,以使推杆伸缩;处理器,与所述电流检测模块、霍尔检测模块和电机驱动模块电性连接,以获得带载电流值,根据所述带载电流值换算得到推杆电机的负载值;
8、通过所述负载值控制电机所带动的推杆行程不超过安全限值,并将上述推杆行程的控制指令发送至电机驱动模块;所述电机驱动模块调节推杆行程控制在安全限值内。
9、第三方面,本发明提供电动摇椅控制系统,包括用于驱动摇椅腿部打开的推杆电机,以及所述推杆电机由推杆电机带载电流值安全行程控制系统。
10、第四方面,本发明提供一种可读的存储介质,所述的可读存储介质上存储程序或者指令,当程序或者指令被处理器执行时,以实现如前述中的一种电机带载电流值安全行程控制方法的步骤。
11、本发明的有益效果是,通过对采集的带载电流值,计算得到电机的实际负载,根据负载推杆伸长长度(即行程)控制伸缩的安全限值,从而提高了电机控制的灵活性,尤其是针对电动摇椅使用场景,通过电机的实际负载确定推杆行程的安全限值,使电动摇椅在安全限位值范围内摇摆,进而防止摇椅发生倾覆。
技术特征:
1.一种推杆电机带载电流值安全行程控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种推杆电机带载电流值安全行程控制方法,其特征在于,
3.根据权利要求2所述的一种推杆电机带载电流值安全行程控制方法,其特征在于,
4.一种推杆电机带载电流值安全行程控制系统,其特征在于,包括:
5.根据权利要求4所述的一种推杆电机带载电流值安全行程控制系统,其特征在于,
6.根据权利要求5所述的一种推杆电机带载电流值安全行程控制系统,其特征在于,
7.一种电动摇椅控制系统,其特征在于,包括:
8.一种可读的存储介质,其特征在于,可读的存储介质上存储程序或者指令,所述程序或者指令被处理器执行时,以实现如权利要求1-3任一项所述的推杆电机带载电流值安全行程控制方法的步骤。
技术总结
本发明涉及电机控制方法及系统领域,特别是涉及一种推杆电机带载电流值安全行程控制方法及控制系统,本发明包括采集推杆电机的带载电流值;根据所述带载电流值换算得到推杆电机的负载值;以及根据所述负载值控制电机所带动的推杆行程不超过安全限值。本发明能够更方便快捷的依据实际的负载对推杆行程的安全限值进行自主适配,通过电机的智能保护系统,实现了对电动摇椅的摆动范围的安全限位,提高了产品的可靠性。
技术研发人员:李鹏
受保护的技术使用者:江苏慕林智造科技股份有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!