基于虚拟信号注入的PMSM无位置传感器的控制方法
本发明属于永磁同步电机控制,具体涉及一种基于虚拟信号注入的pmsm无位置传感器的控制方法。
背景技术:
1、永磁同步电机(permanent magnet synchronous motor,pmsm)具有体积小、高效率、高密度功率等优点。在零低速领域中,许多学者开展了对高频信号注入的研究。因注入时会使用各种滤波器,所以导致系统抗干扰能力下降、可靠性低等缺陷。通过虚拟信号注入的控制方法已经成为了电机控制领域中的研究热点之一,但现有技术的虚拟信号注入法存在由于电机参数引起输出转矩不稳定的问题。
技术实现思路
1、本发明的目的时提供一种基于虚拟信号注入的pmsm无位置传感器的控制方法,解决了现有的虚拟信号注入法由于电机参数引起输出转矩不稳定的问题。
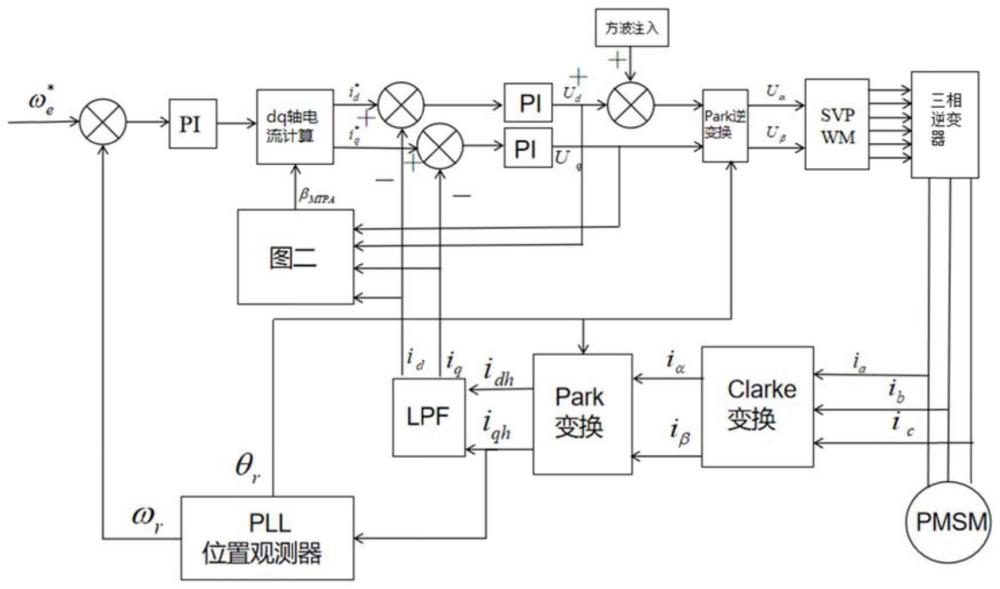
2、本发明所采取的技术方案是,一种基于虚拟信号注入的pmsm无位置传感器的控制方法,包括:
3、步骤1:通过注入高频正弦虚拟信号,获取注入正弦虚拟信号后pmsm对应的电磁转矩;
4、步骤2:由步骤1得到的电磁转矩提取出mtpa指示因子,所述指示因子为mtpa工作点的定子电流矢量角;
5、步骤3:在估计旋转坐标系中注入高频方波电压信号,以提取高频方波电压信号对应的高频电流响应;
6、步骤4:由步骤3得到的所述高频电流响应,通过信号处理得到转子位置误差信号;
7、步骤5:由步骤4中得到的所述转子位置误差信号,通过pll锁相环估计pmsm的转速和转子位置。
8、优选地,所述步骤1包括:
9、步骤1.1:定义永磁同步电机在估计旋转坐标系中的电压方程为:
10、
11、其中,ud、uq分别为电机电压在d轴和q轴的分量,id和iq分别为电机电流在d轴和q轴的分量,r为定子电阻,ld、lq分别为定子电感在d轴和q轴分量,we为转子电气角速度,为转子永磁体产生的磁链;
12、定义电磁转矩方程为:
13、
14、其中,te为电机的电磁转矩,pn为电机的极对数,为转子永磁体磁链大小;
15、步骤1.2:电机稳态运行时,将电流微分项视为零,则确定lq,的表达式:
16、
17、
18、将式(3)、(4)带入式(2)中,则电磁转矩的另一种表达式为:
19、
20、步骤1.3:向定子电流矢量角注入所述高频正弦虚拟信号,所述高频正弦虚拟信号表示为:
21、δβ=asin(ωht) (6)
22、其中,a为注入的所述高频正弦虚拟信号的幅值,ωh为注入的所述高频正弦虚拟信号的角频率;
23、注入所述高频正弦虚拟信号之后,电流为:
24、
25、根据重构电磁转矩te的方程如下:
26、
27、按照式(8)计算得到所述电磁转矩te。
28、优选地,所述步骤2包括:
29、将所述电磁转矩teh视作关于定子电流矢量角β的函数,在定子电流矢量角β处进行泰勒展开得到:
30、
31、将二阶以上的偏导数项忽略不计,得到二阶偏导数:
32、
33、通过带通滤波器滤除整数项与角频率为2ωh项,获得项;
34、将项乘以sin(ωht)得到:
35、
36、通过低通滤波器滤除角频率为2ωh项,获得项,对积分获得mtpa工作点的定子电流矢量角βmtpa。
37、优选地,所述步骤3包括:
38、步骤3.1:确定永磁同步电机的高频模型为:
39、
40、式中,udh、uqh为电机在d-q轴的高频电压,idh、iqh为电机在d-q轴的高频电流,ldh、lqh为d-q轴注入高频方波电压后的定子电感,近似认为ldh=ld,lqh=lq,通过整理得到:
41、
42、将式(13)变换到估计转子旋转坐标系为:
43、
44、式中,l0为均值电感,l0=(ldh+lqh)/2,l1为差值电感,l1=(ldh-lqh)/2,δθ为实际d-q轴的角度θ与估计d-q轴的角度之间的误差,t(δθ)为坐标变换算子;
45、步骤3.2:定义注入的所述高频方波信号为:
46、
47、定义估计误差为δθ为:
48、
49、当uqh=0时,从式(14)中得到估计d-q轴的高频响应电流表达式为:
50、
51、根据式(17)计算得到所要述高频响应电流。
52、通过采用上述技术方案,本发明具有如下有益效果:
53、本发明通过注入虚拟的正弦信号,达到不依靠电机参数的目的,使得永磁同步电机能够更好的追踪定子电流矢量角。该方法能够在不影响转子位置估计精度、不依赖电机参数的情况下,实现mtpa控制,并且在不同工况下具有较好的动态响应能力和鲁棒性。同时,本发明通过利用含有转子位置信息的高频电流响应,估计永磁同步电机转子位置和转速,最终实现对永磁同步电机的无速度传感器矢量控制。
技术特征:
1.一种基于虚拟信号注入的pmsm无位置传感器的控制方法,其特征在于,包括:
2.根据权利要求1所述的基于虚拟信号注入的pmsm无位置传感器的控制方法,其特征在于,所述步骤1包括:
3.根据权利要求2所述的基于虚拟信号注入的pmsm无位置传感器的控制方法,其特征在于,所述步骤2包括:
4.根据权利要求3所述的基于虚拟信号注入的pmsm无位置传感器的控制方法,其特征在于,所述步骤3包括:
技术总结
本发明提供一种基于虚拟信号注入的PMSM无位置传感器的控制方法,其特征在于,包括:步骤1:通过注入高频正弦虚拟信号,获取注入正弦虚拟信号后PMSM对应的电磁转矩;步骤2:由步骤1得到的电磁转矩提取出MTPA指示因子,所述指示因子为MTPA工作点的定子电流矢量角;步骤3:在估计旋转坐标系中注入高频方波电压信号,以提取高频方波电压信号对应的高频电流响应;步骤4:由步骤3得到的高频电流响应,通过信号处理得到转子位置误差信号;步骤5:由步骤4中得到的转子位置误差信号,通过PLL锁相环估计PMSM的转速和转子位置。本发明能够在不影响转子位置估计精度、不依赖电机参数的情况下,实现MTPA控制,并且在不同工况下具有较好的动态响应能力和鲁棒性。
技术研发人员:苏加琪,卢建宁,张军帅
受保护的技术使用者:上海应用技术大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!