一种搬运机器人专用轴电机的制作方法
本技术涉及搬运机器人,具体为一种搬运机器人专用轴电机。
背景技术:
1、搬运机器人是一种可以实现代替人工搬运的自动化机械产品,通过使用搬运机器人设备握持工件,并将工件从一个加工位置移到另一个加工位置,使用时可安装不同的末端执行器阿里完成各种不同形状和状态的工件搬运工作,减轻了人类繁重的体力劳动,大大提高了效率,广泛使用于工业生产加工过程中,搬运机器人内部的转动轴需要使用电机进行驱动。
2、但搬运机器人专用轴电机在实际使用的过程中,电机壳体大多裸露在外部,在安装以及使用时,在受到外部撞击后,容易造成外壳的凹陷破碎主体结构损伤,导致电机的报废,不便于对电机的外部进行防护,因此,需要一种新型的搬运机器人专用轴电机来解决上述的不足。
技术实现思路
1、本实用新型的目的在于提供一种搬运机器人专用轴电机,以解决上述背景技术中提出的不便于对电机的外部进行防护的问题。
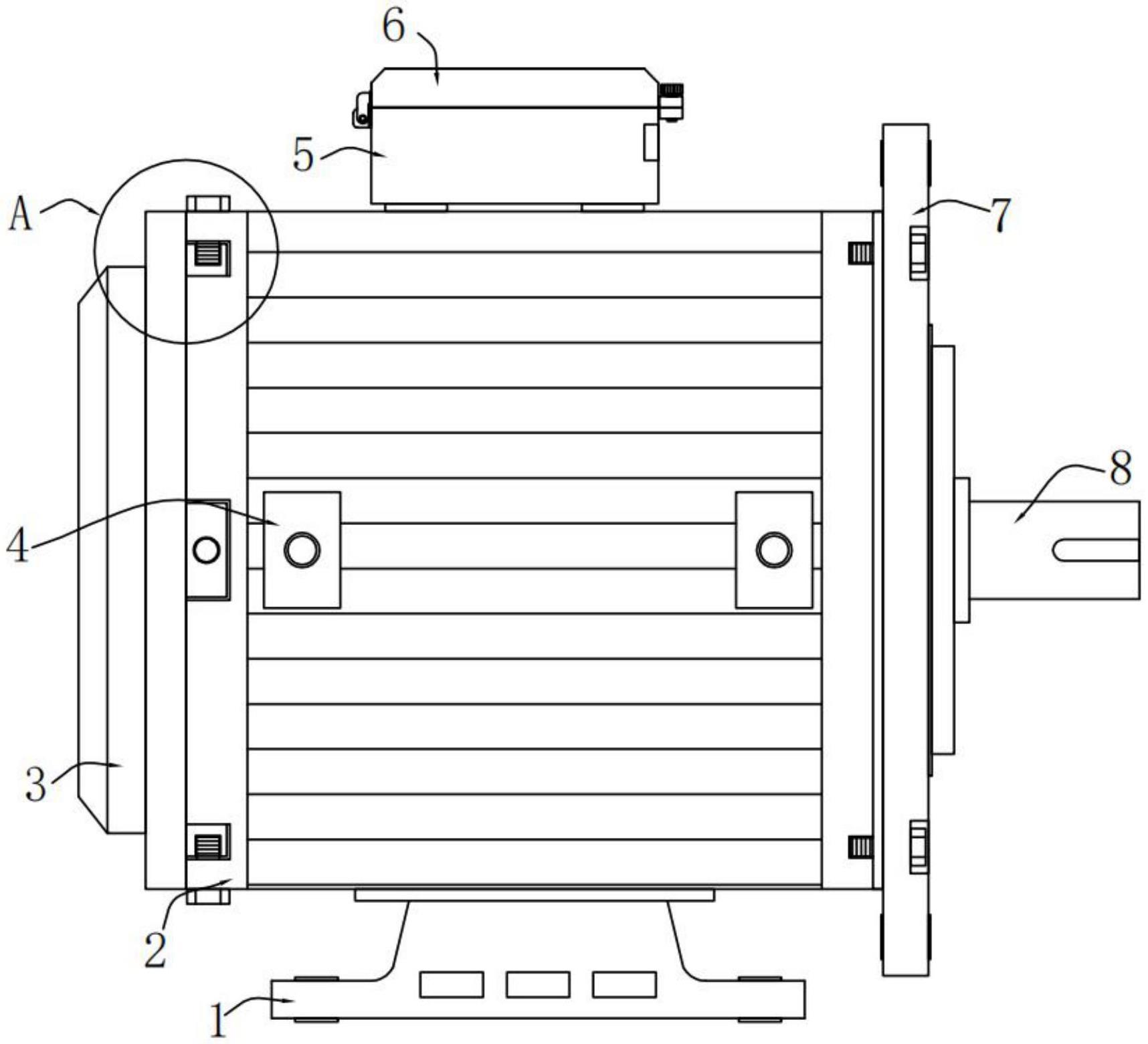
2、为实现上述目的,本实用新型提供如下技术方案:一种搬运机器人专用轴电机,包括电机主体,所述电机主体的底端固定有安装底座,所述电机主体的左侧设置有端盖,所述电机主体的顶端固定有接线盒主体,所述接线盒主体的顶端设置有顶盖,所述电机主体的右侧固定有安装端面,所述电机主体的右侧设置有输出轴,且输出轴的右侧贯穿安装端面的内部,所述电机主体两端的两侧分别固定有固定块,所述固定块一端的内部设置有螺纹孔,所述电机主体外部的左侧设置有外护罩,所述外护罩两端的两侧分别设置有固定螺栓,所述外护罩的两端以及左侧的内部分别设置有预留孔。
3、优选的,所述固定螺栓分别贯穿外护罩的两端,所述预留孔贯穿外护罩的内部。
4、优选的,所述固定块和螺纹孔分别关于电机主体的垂直中心线对称设置有四组。
5、优选的,所述端盖右侧的顶部和底部以及两端分别固定有插块,所述电机主体左侧的顶部和底部以及两端分别设置有插槽,所述插块的内部设置有螺孔,所述电机主体顶部和底部以及两端的左侧分别贯穿设置有拆装螺栓。
6、优选的,所述接线盒主体左侧的顶端固定有固定座,所述顶盖的左侧固定有连接脚,所述接线盒主体和顶盖的右侧分别固定有固定脚,所述固定脚的内部贯穿设置有内孔,所述固定脚的顶端设置有锁紧杆。
7、优选的,所述连接脚的底端与固定座的内部之间相铰接,所述锁紧杆的外部设置有外螺纹,所述内孔的内部设置有与外螺纹相配合的内螺纹。
8、与现有技术相比,本实用新型的有益效果是:该搬运机器人专用轴电机不仅实现了便于对电机的外部进行防撞保护,实现了便于对电机的内部进行拆装维护检修,而且实现了便于电机接线盒的使用;
9、(1)通过设置有电机主体、固定块、外护罩、固定螺栓、预留孔和螺纹孔,电机在使用时可以通过将外护罩从电机主体的左侧套入在电机主体的外部后,再分别在外护罩外部两端的两侧使用固定螺栓对应固定块一端内部设置的螺纹孔中进行旋入后,即可将外护罩固定在电机主体的外部,通过设置的电机主体可以在安装以及使用的过程中进行外部的防撞保护,减少外部撞击电机外部主体结构的损伤,对电机在使用时进行更好的保护,同时外护罩内部设置有多组预留孔不会对电机的外部散热造成影响;
10、(2)通过设置有电机主体、端盖、插块、螺孔、插槽和拆装螺栓,电机在使用时,可以通过在电机主体外部的左侧,分别将两端以及顶部和底部设置的拆装螺栓对应从插块中的螺孔内部向外旋出之后,即可将端盖利用右侧固定的四组插块从电机主体的左侧进行拆卸下,打开电机主体左侧的内部后,可方便对电机的内部进行维护以及检修操作;
11、(3)通过设置有接线盒主体、顶盖、固定座、连接脚、锁紧杆、固定脚和内孔,电机安装后使用的过程中,可以通过在固定脚的顶端将设置的锁紧杆对应从内孔中向外进行旋出之后,即可对顶盖在接线盒主体的顶端进行解锁,之后可以再通过将顶盖利用连接脚与固定座内部之间的铰接向左进行翻转打开接线盒主体的内部后,方便进行接线操作,减少顶盖与接线盒主体之间直接螺纹的直接固定,提高了接线操作的效率。
技术特征:
1.一种搬运机器人专用轴电机,包括电机主体(2),其特征在于:所述电机主体(2)的底端固定有安装底座(1),所述电机主体(2)的左侧设置有端盖(3),所述电机主体(2)的顶端固定有接线盒主体(5),所述接线盒主体(5)的顶端设置有顶盖(6),所述电机主体(2)的右侧固定有安装端面(7),所述电机主体(2)的右侧设置有输出轴(8),且输出轴(8)的右侧贯穿安装端面(7)的内部,所述电机主体(2)两端的两侧分别固定有固定块(4),所述固定块(4)一端的内部设置有螺纹孔(12),所述电机主体(2)外部的左侧设置有外护罩(9),所述外护罩(9)两端的两侧分别设置有固定螺栓(10),所述外护罩(9)的两端以及左侧的内部分别设置有预留孔(11)。
2.根据权利要求1所述的一种搬运机器人专用轴电机,其特征在于:所述固定螺栓(10)分别贯穿外护罩(9)的两端,所述预留孔(11)贯穿外护罩(9)的内部。
3.根据权利要求1所述的一种搬运机器人专用轴电机,其特征在于:所述固定块(4)和螺纹孔(12)分别关于电机主体(2)的垂直中心线对称设置有四组。
4.根据权利要求1所述的一种搬运机器人专用轴电机,其特征在于:所述端盖(3)右侧的顶部和底部以及两端分别固定有插块(13),所述电机主体(2)左侧的顶部和底部以及两端分别设置有插槽(15),所述插块(13)的内部设置有螺孔(14),所述电机主体(2)顶部和底部以及两端的左侧分别贯穿设置有拆装螺栓(16)。
5.根据权利要求1所述的一种搬运机器人专用轴电机,其特征在于:所述接线盒主体(5)左侧的顶端固定有固定座(17),所述顶盖(6)的左侧固定有连接脚(18),所述接线盒主体(5)和顶盖(6)的右侧分别固定有固定脚(20),所述固定脚(20)的内部贯穿设置有内孔(21),所述固定脚(20)的顶端设置有锁紧杆(19)。
6.根据权利要求5所述的一种搬运机器人专用轴电机,其特征在于:所述连接脚(18)的底端与固定座(17)的内部之间相铰接,所述锁紧杆(19)的外部设置有外螺纹,所述内孔(21)的内部设置有与外螺纹相配合的内螺纹。
技术总结
本技术公开了一种搬运机器人专用轴电机,包括电机主体,所述电机主体的底端固定有安装底座,所述电机主体的左侧设置有端盖。该搬运机器人专用轴电机通过电机在使用时可以通过将外护罩从电机主体的左侧套入在电机主体的外部后,再分别在外护罩外部两端的两侧使用固定螺栓对应固定块一端内部设置的螺纹孔中进行旋入后,即可将外护罩固定在电机主体的外部,通过设置的电机主体可以在安装以及使用的过程中进行外部的防撞保护,减少外部撞击电机外部主体结构的损伤,对电机在使用时进行更好的保护,同时外护罩内部设置有多组预留孔不会对电机的外部散热造成影响,解决的是不便于对电机的外部进行防护的问题。
技术研发人员:安博通,娄颖
受保护的技术使用者:大连瑞恒德科技有限公司
技术研发日:20230217
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!