集成伺服驱动器的位置控制电机的制作方法
本技术涉及电机,具体的讲是一种集成伺服驱动器的位置控制电机。
背景技术:
1、电机的位置控制是指让电机的转轴旋转至一定角度后停止并保持静止,目前,流行的电机位置控制方案通常是采用独立的伺服驱动器、电机以及单磁编码器组合使用,需要采购的部件就包括市伺服驱动器、电机以和单磁编码器,场上的位置控制大多采购独立的伺服驱动与电机及单独磁编码器组合使用,首先部件多会增加一定的运输和储存成本,且这种形式无法满足物流仓储的集成化、小型化的要求;
2、目前,物流仓储朝着全面自动化发展,通过轮式移动机器人(包括agv(automatedguided vehicle)和amr(automatic mobile robot))能够完成自动存取货工作,轮式机器人在进行拣货作用时,需要用到抓取装置,以将货物推入货架内,或将货架内的货物取出,受限于物流场景的地面条件,相邻货物之间的间隙通常较小,所以抓取装置也向着轻量化、小型化的方向发展。
技术实现思路
1、本实用新型要解决的技术问题是针对以上不足,提供一种集成伺服驱动器的位置控制电机。
2、为解决以上技术问题,本实用新型采用以下技术方案:
3、集成伺服驱动器的位置控制电机,包括电机和电路板,电机转轴后端向电机的后方延伸,所述电机转轴的外侧后端设置有径向磁铁,所述电路板设置于电机的后端且位于径向磁铁的后方,所述电路板与电机的轴线垂直设置,所述电路板上集成有伺服驱动器和磁角度传感器,所述磁角度传感器设置于电路板的前表面且与径向磁铁配合,所述电机的三相引出线与电路板电连接。
4、进一步的,还包括电机外壳,所述电机外壳套设于电机的外侧,所述电路板设置于电机外壳内。
5、进一步的,还包括抓手外壳、联轴器、抓手转轴和抓杆,所述电机外壳的前端设置有固定板,所述抓手外壳设置于固定板的前端,所述抓手转轴设置于抓手外壳的前端且抓手转轴的前端贯穿抓手外壳向前延伸,所述抓杆的一端固定于抓手转轴的前端,所述联轴器设置于抓手外壳的内部后端,所述联轴器的前后两端分别与抓手转轴的后端与电机转轴的前端连接。
6、进一步的,所述抓手转轴的中部设置有圆柱凸起,所述抓手外壳的前端设置有两个轴承,两个轴承套设于圆柱凸起的外侧,所述圆柱凸起的后端设置有限位凸起,所述圆柱凸起的前端开设有环形槽,所述环形槽内设置有弹性卡环。
7、进一步的,所述抓手转轴的前端设置有腰形凸起,所述抓杆的一端设置有与腰形凸起配合的腰形孔,所述抓手转轴的前端设置有用于将抓杆固定于抓手转轴上的固定块。
8、本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
9、本实用新型提出一种集成伺服控制器的位置控制电机,该电机结构紧凑,集成了伺服驱动器和角度传感器,引出线只需要两根电源线以及两根通信线,即可实现对电机角度的控制,能够实现设备小型化的要求;
10、且基于上述电机,本实用新型提出一种抓手,适配于上述电机,能够减少轮式机器人上抓取装置的体积,便于抓手移动至相邻货物的间隙内,以完成存取货作业。
11、下面结合附图和实施例对本实用新型进行详细说明。
技术特征:
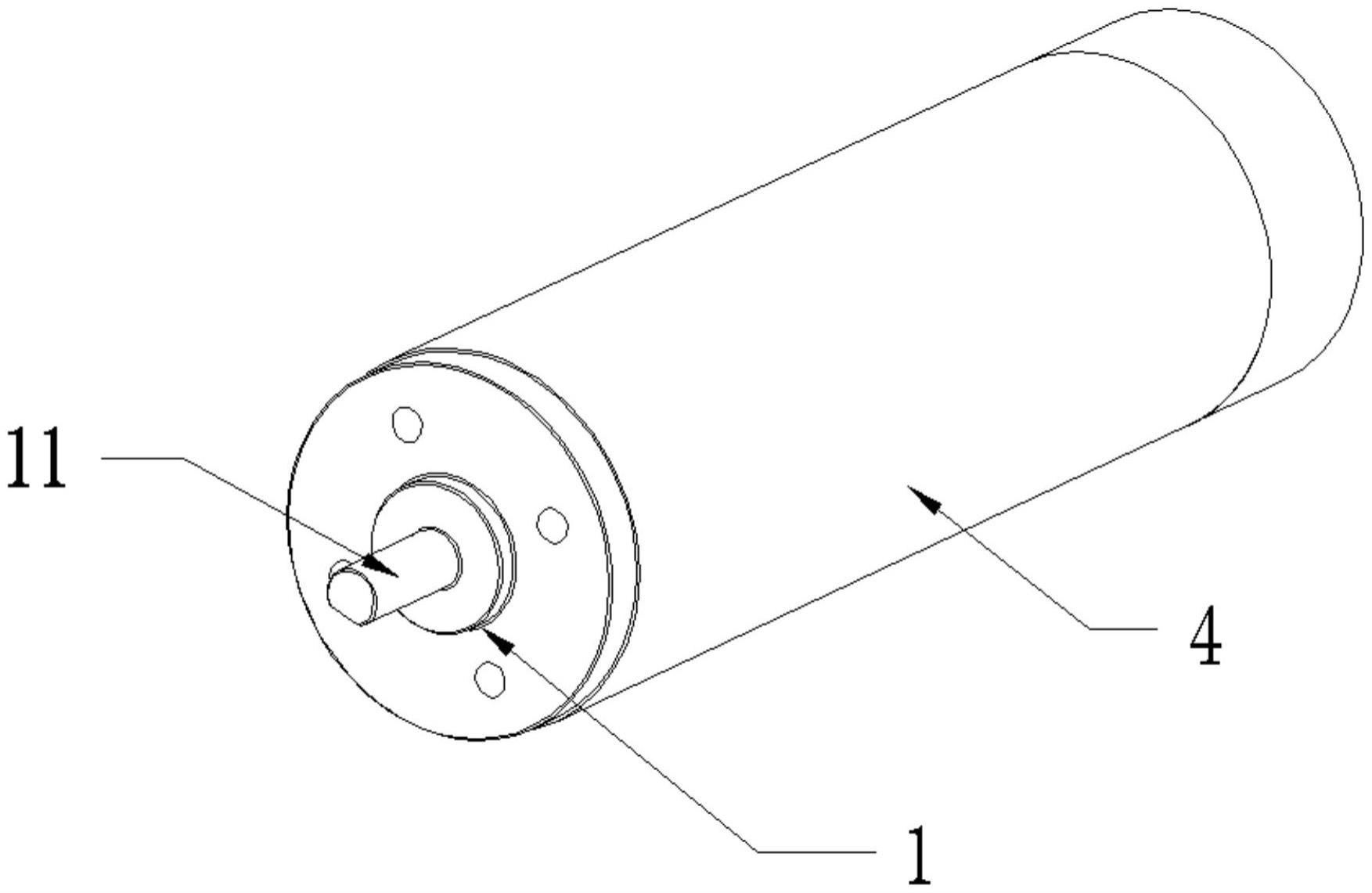
1.集成伺服驱动器的位置控制电机,其特征在于,包括电机(1)和电路板(2),电机转轴(11)后端向电机(1)的后方延伸,所述电机转轴(11)的外侧后端设置有径向磁铁(3),所述电路板(2)设置于电机的后端且位于径向磁铁(3)的后方,所述电路板(2)与电机(1)的轴线垂直设置,所述电路板(2)上集成有伺服驱动器(21)和磁角度传感器(22),所述磁角度传感器(22)设置于电路板(2)的前表面且与径向磁铁(3)配合,所述电机(1)的三相引出线与电路板(2)电连接。
2.根据权利要求1所述的集成伺服驱动器的位置控制电机,其特征在于,还包括电机外壳(4),所述电机外壳(4)套设于电机(1)的外侧,所述电路板(2)设置于电机外壳(4)内。
3.根据权利要求2所述的集成伺服驱动器的位置控制电机,其特征在于,还包括抓手外壳(51)、联轴器(52)、抓手转轴(53)和抓杆(54),所述电机外壳(4)的前端设置有固定板(6),所述抓手外壳(51)设置于固定板(6)的前端,所述抓手转轴(53)设置于抓手外壳(51)的前端且抓手转轴(53)的前端贯穿抓手外壳(51)向前延伸,所述抓杆(54)的一端固定于抓手转轴(53)的前端,所述联轴器(52)设置于抓手外壳(51)的内部后端,所述联轴器(52)的前后两端分别与抓手转轴(53)的后端与电机转轴(11)的前端连接。
4.根据权利要求3所述的集成伺服驱动器的位置控制电机,其特征在于,所述抓手转轴(53)的中部设置有圆柱凸起(531),所述抓手外壳(51)的前端设置有两个轴承(511),两个轴承(511)套设于圆柱凸起(531)的外侧,所述圆柱凸起(531)的后端设置有限位凸起(532),所述圆柱凸起(531)的前端开设有环形槽(533),所述环形槽(533)内设置有弹性卡环(7)。
5.根据权利要求3所述的集成伺服驱动器的位置控制电机,其特征在于,所述抓手转轴(53)的前端设置有腰形凸起(534),所述抓杆(54)的一端设置有与腰形凸起(534)配合的腰形孔,所述抓手转轴(53)的前端设置有用于将抓杆(54)固定于抓手转轴(53)上的固定块(55)。
技术总结
本技术涉及一种集成伺服驱动器的位置控制电机,该位置控制电机包括电机和电路板,电机转轴后端向电机的后方延伸,所述电机转轴的外侧后端设置有径向磁铁,所述电路板设置于电机的后端且位于径向磁铁的后方,所述电路板与电机的轴线垂直设置,所述电路板上集成有伺服驱动器和磁角度传感器,所述磁角度传感器设置于电路板的前表面且与径向磁铁配合,所述电机的三相引出线与电路板电连接。本技术能够实现精确的位置控制,且满足位置控制电机和抓手的小型化、轻量化。
技术研发人员:梅红星
受保护的技术使用者:湖北九州云智科技有限公司
技术研发日:20230221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!