用于无人驾驶汽车的激光雷达低转速光感应电机及其轴芯的制作方法
本申请涉及电机,特别地涉及一种用于无人驾驶汽车的激光雷达低转速光感应电机及其轴芯。
背景技术:
1、因激光雷达具有分辨率高、抗有源干扰能力强、隐蔽性好、低空探测性能好、质量轻、体积小等等诸多的优点,而广泛应用于物体探测和规避、物体识别与跟踪、及时定位与地图构建等领域。随着新能源汽车的兴起,激光雷达技术在无人驾驶领域也得到了广泛的应用,成为无人驾驶不可或缺的探测和传感部件。
2、光感应电机作为激光雷达的核心部件在激光雷达中具有重要的地位。电机轴芯是组成电机的重要组成部分,设计并加工出符合高要求的轴芯,是电机设计过程中的重要环节。现有的用于无人驾驶汽车激光雷达低转速光感应电机的轴芯的材质强度较低,导致光感应电机在使用过程中出现转动部件晃动等不良现象。另外,由于轴芯结构简单、平面度差,导致其在与轴承配合时,轴芯因受力不均出现变形、变异的情况。同时,轴承也会因受挤压而导致内部结构损伤,从而影响光感应电机的寿命。
技术实现思路
1、针对现有技术中存在的技术问题,本申请提出了一种用于无人驾驶汽车的激光雷达低转速光感应电机及其轴芯,有效提高光感应电机的性能,延长光感应电机的使用寿命。
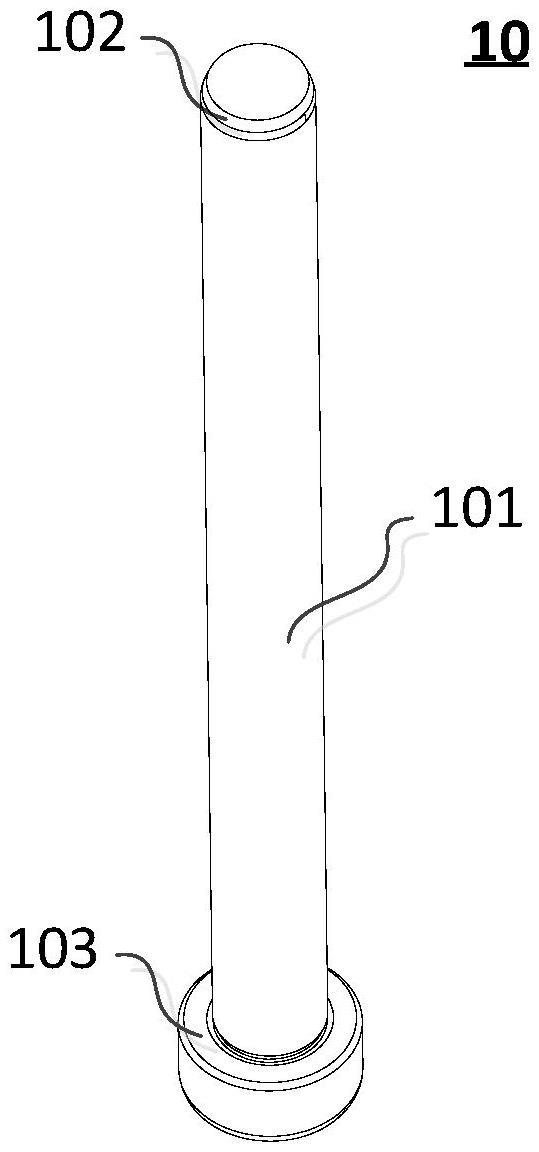
2、一种用于无人驾驶汽车激光雷达低转速光感应电机的轴芯,包括:轴芯本体,所述轴芯本体的一侧端部沿所述轴芯外圆周方向凸设有台阶面形成台阶轴;以及所述台阶面的平面度误差≤0.005mm。
3、优选地,所述台阶面与所述轴芯的外圆周面保持垂直,两者的衔接根部位置保持平整。
4、优选地,所述轴芯本体经硬氮化处理,其设计硬度为hrc63-67。
5、优选地,所述轴芯本体的另一侧端部设有便于装配引导的倒角。
6、本申请还提出了一种用于无人驾驶汽车激光雷达低转速光感应电机,包括底座和可旋转容置在所述底座中的转镜,所述转镜的中空内腔中设有定子座,所述定子座的内部设有轴芯组件,所述定子座的外部设有磁环组件,所述定子座固定在所述底座上;所述轴芯组件中包括以上所述的轴芯,所述轴芯通过转接法兰与所述转镜固定,所述转镜、转接法兰和轴芯相对于所述定子座转动。
7、优选地,所述轴芯组件包括:轴芯;上轴承,套设于所述轴芯本体的中部;下轴承,套设于所述轴芯本体的底部的所述台阶面的上方;内挡,套设在所述轴芯本体的外壁并位于所述上轴承和下轴承之间;外挡,套设于所述内挡的外侧,所述外挡为圆筒状结构;波形弹簧,套设于所述上轴承与所述外挡之间的所述轴芯本体的外壁,其一端与所述上轴承下端相接触或抵紧,其另一端与所述外挡上端相接触或抵紧;以及轴套,套设于所述轴芯本体,其一端与所述转接法兰相接触或抵紧,其另一端与所述上轴承上端相接触或抵紧;其中,所述外挡上端与所述波形弹簧的下端相抵顶;所述外挡下端与所述下轴承外圈相接触。
8、优选地,所述轴芯一侧端部套设于所述转接法兰内,所述轴芯与所述转接法兰之间为过盈配合;其中,所述轴芯直径的范围为:2-0.004至2-0.006mm,所述转接法兰内径的范围为:2-0.010至2-0.015mm。
9、优选地,所述上轴承与轴芯本体之间为过渡配合连接;其中,所述轴芯本体直径的范围为:2-0.004至2-0.006mm,所述轴承内径的范围为:2至2-0.005mm。
10、优选地,所述内挡与轴芯本体之间为间隙配合;其中,所述轴芯本体直径的范围为:2-0.004至2-0.006mm,所述内挡内径的范围为:2+0.025至2+0.015mm。
11、优选地,所述轴套与所述轴芯本体之间为小过盈配合;其中,所述轴芯本体直径的范围为:2-0.004至2-0.006mm,所述轴套内径的范围为:2-0.004至2-0.006mm。
12、优选地,所述内挡的上边缘与所述上轴承内圈相接触;其中,所述内挡上端面的平面度误差≤0.005mm;所述内挡的上边缘面相对所述上轴承内圈面的平行度≤0.005mm;所述内挡的下边缘与所述下轴承内圈相接触;其中,所述内挡下端面的平面度误差≤0.005mm;所述内挡的下边缘面相对所述下轴承内圈面的平行度≤0.005mm。
13、优选地,所述台阶面的外径与所述下轴承的内圈直径相等。
14、优选地,所述外挡外圆与定子座相接触;其中,所述外挡外圆与定子座之间为间隙配合;其中,所述外挡外径的范围为:6-0.015至/6-0.03mm,所述定子座内径的直径范围为:6+0.006至6+0.003mm。
15、优选地,所述外挡中部设置有用于容置粘粘剂的环形凹槽。
16、优选地,所述外挡上端与所述波形弹簧的下端相抵顶;所述外挡下端与所述下轴承外圈相接触。
17、本申请通过对应用于无人驾驶汽车的激光雷达低转速光感应电机的轴芯的结构和材质的设计,解决了光感应电机在使用过程中出现转动部件晃动等不良现象,以及轴芯与轴承配合时,轴芯因受力不均出现变形、变异的情况,电机整体结构紧凑、各个零部件受力均匀,从而提高光感应电机的性能,延长光感应电机的使用寿命。
技术特征:
1.一种用于无人驾驶汽车激光雷达低转速光感应电机的轴芯,包括:轴芯本体,其特征在于,所述轴芯本体的一侧端部沿所述轴芯外圆周方向凸设有台阶面形成台阶轴;以及
2.根据权利要求1所述用于无人驾驶汽车激光雷达低转速光感应电机的轴芯,其特征在于,所述台阶面与所述轴芯的外圆周面保持垂直,两者的衔接根部位置保持平整。
3.根据权利要求1所述用于无人驾驶汽车激光雷达低转速光感应电机的轴芯,其特征在于,所述轴芯本体经硬氮化处理,其设计硬度为hrc63-67。
4.根据权利要求1所述用于无人驾驶汽车激光雷达低转速光感应电机的轴芯,其特征在于,所述轴芯本体的另一侧端部设有便于装配引导的倒角。
5.一种用于无人驾驶汽车激光雷达低转速光感应电机,包括底座和可旋转容置在所述底座中的转镜,所述转镜的中空内腔中设有定子座,所述定子座的内部设有轴芯组件,所述定子座的外部设有磁环组件,所述定子座固定在所述底座上,其特征在于,所述轴芯组件中包括如权利要求1-4中任一项所述的轴芯,所述轴芯通过转接法兰与所述转镜固定,所述转镜、转接法兰和轴芯相对于所述定子座转动。
6.根据权利要求5所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述轴芯组件包括:
7.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述轴芯一侧端部套设于所述转接法兰内,所述轴芯与所述转接法兰之间为过盈配合;其中,所述轴芯直径的范围为:2-0.004至2-0.006mm,所述转接法兰内径的范围为:2-0.010至2-0.015mm。
8.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述上轴承与轴芯本体之间为过渡配合连接;其中,所述轴芯本体直径的范围为:2-0.004至2-0.006mm,所述轴承内径的范围为:2至2-0.005mm。
9.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述内挡与轴芯本体之间为间隙配合;其中,所述轴芯本体直径的范围为:2-0.004至2-0.006mm,所述内挡内径的范围为:2+0.025至2+0.015mm。
10.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述轴套与所述轴芯本体之间为小过盈配合;其中,所述轴芯本体直径的范围为:2-0.004至2-0.006mm,所述轴套内径的范围为:2-0.004至2-0.006mm。
11.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述内挡的上边缘与所述上轴承内圈相接触;其中,所述内挡上端面的平面度误差≤0.005mm;所述内挡的上边缘面相对所述上轴承内圈面的平行度≤0.005mm;所述内挡的下边缘与所述下轴承内圈相接触;其中,所述内挡下端面的平面度误差≤0.005mm;所述内挡的下边缘面相对所述下轴承内圈面的平行度≤0.005mm。
12.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述台阶面的外径与下轴承的内圈直径相等。
13.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述外挡外圆与定子座相接触;其中,所述外挡外圆与定子座之间为间隙配合;其中,所述外挡外径的范围为:6-0.015至/6-0.03mm,所述定子座内径的直径范围为:6+0.006至6+0.003mm。
14.根据权利要求6所述用于无人驾驶汽车激光雷达低转速光感应电机,其特征在于,所述外挡中部设置有用于容置粘粘剂的环形凹槽。
技术总结
本申请涉及一种用于无人驾驶汽车的激光雷达低转速光感应电机及其轴芯,所述轴芯包括轴芯本体,所述轴芯的一侧端部沿所述轴芯外圆周方向凸设有台阶面形成台阶轴;所述台阶面的平面度误差≤0.005mm。所述光感应电机包括底座和可旋转容置在所述底座中的转镜,所述转镜的中空内腔中设有定子座,所述定子座的内部设有轴芯组件,所述定子座的外部设有磁环组件,所述定子座固定在所述底座上;所述轴芯组件中包括以上所述的轴芯,所述轴芯通过转接法兰与所述转镜固定,所述转镜、转接法兰和轴芯相对于所述定子座转动。本申请提高了光感应电机的性能,并延长光感应电机的使用寿命。
技术研发人员:赵晋烨,吴东方
受保护的技术使用者:浙江睿驰同利汽车电子有限公司
技术研发日:20230315
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!