一种锁紧机构及线上行走装置的制作方法
本技术涉及线缆包裹机器人,尤其涉及一种锁紧机构及线上行走装置。
背景技术:
1、线缆包裹机器人用于为架空的裸线缆包覆一层绝缘层,在具体工作时,机器人挂设在线缆上,一边沿着电缆线行走,一边对所经过的线缆进行绝缘层的包覆;
2、现有技术中,如图1和图2中所示,授权公告号为cn209313307u的中国实用新型专利于2019年8月27日公开了一种用于架空线缆的包裹机器人,该机器人在两端设置了进线口01,线缆从进线口进入至机器人内部,并且最终架设在两个支撑轮上;
3、然而发明人在实施上述方案时发现,上述方案中进线口没有任何防护措施,存在线缆脱落的风险。
技术实现思路
1、鉴于以上技术问题中的至少一项,本实用新型提供了一种锁紧机构及线上行走装置,采用锁紧结构以防止架空线缆的脱落。
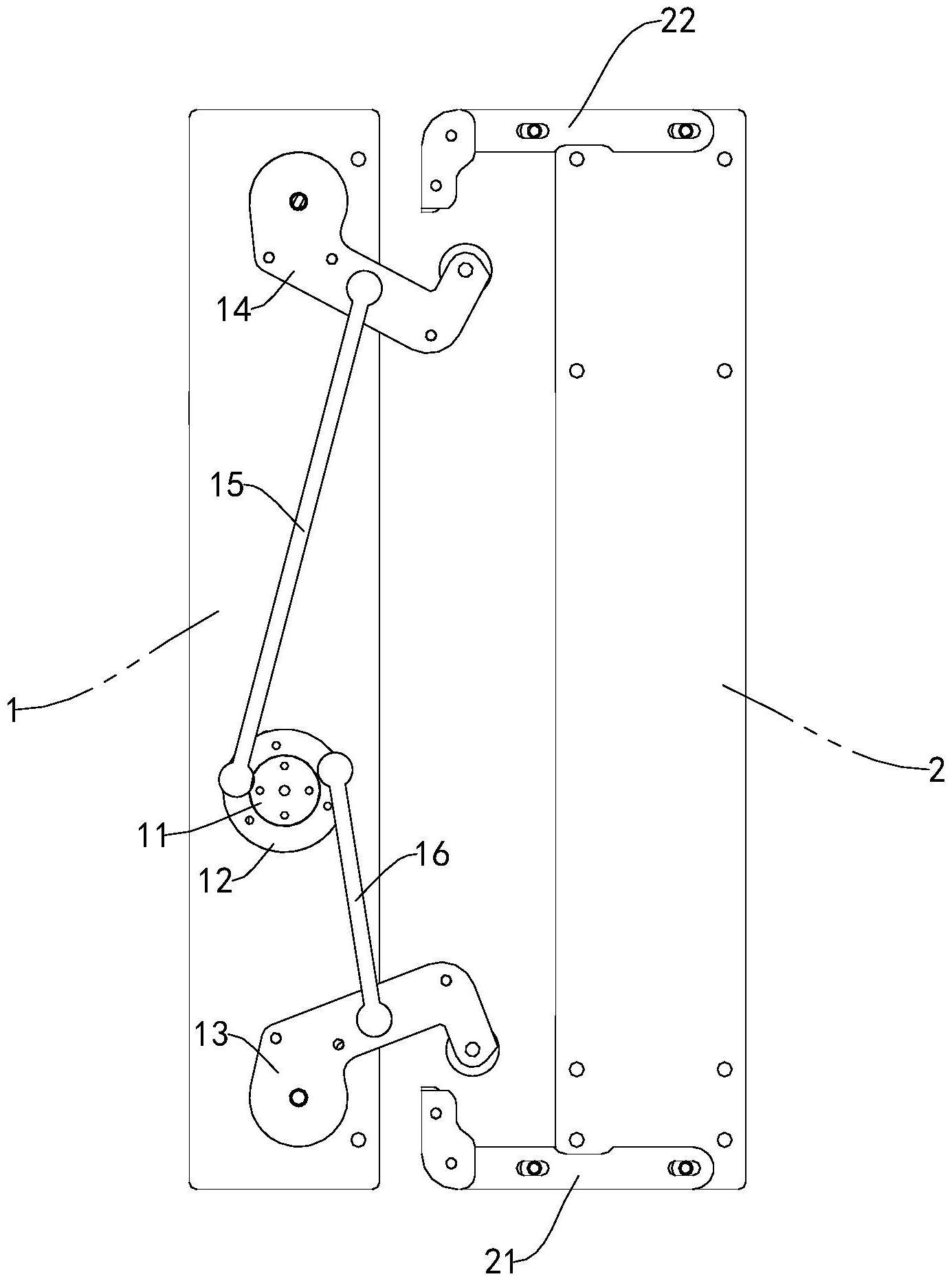
2、根据本实用新型的第一方面,提供一种锁紧机构,该机构设置于可开合的第一构件和第二构件上,该机构包括固定在第一构件上的转动驱动件、与所述转动驱动件的输出轴连接的转盘、一端铰接在第一构件长度方向两端的第一卡臂和第二卡臂以及第一连杆和第二连杆,所述第一连杆的一端转动连接在所述转盘上,另一端转动连接在所述第一卡臂的中部,所述第二连杆转动连接在所述转盘上,另一端转动连接在所述第二卡臂的中部;
3、该机构还包括固定在第二构件上的第一搭扣和第二搭扣件,所述第一搭扣件和第二搭扣件分别固定第二构件上的两端,并且所述第一搭扣件与所述第一卡臂对应设置,所述第二搭扣件与所述第二卡臂对应设置;
4、其中,所述第一卡臂和第二卡臂被配置为在解锁时所述转动驱动件驱动所述转盘朝向第一方向转动设定角度,使得所述连杆带动所述第一卡臂自由端和第二卡臂的自由端朝向互相靠近的方向转动以离开所述第一搭扣件和第二搭扣件的卡扣范围,在锁定时所述驱动件朝向与第一方向相反的第二方向转动设定角度,使得所述第一卡臂和第二卡臂的自由端卡分别卡设在所述第一搭扣件和第二搭扣件内。
5、在本实用新型一些实施例中,所述第一搭扣件和第二搭扣件呈l型,包括长臂以及与所述长臂垂直的短臂,所述长臂固定在第二构件上,且部分突出于第二构件,所述短臂悬空设置,且所述第一搭扣件和第二搭扣件的短臂朝向靠近对方的方向。
6、在本实用新型一些实施例中,所述短臂在其厚度方向上的两侧还具有加强板,两所述加强板的宽度大于所述短臂的宽度,且在固定时与所述短臂的外周对齐,使得两所述加强板凸出于所述短臂的部分与所述短臂的内壁构成防脱槽。
7、在本实用新型一些实施例中,所述第一卡臂和第二卡臂呈l型,且自由端朝向远离对方的方向设置。
8、在本实用新型一些实施例中,所述第一卡臂和第二卡臂的铰接点底部还连接有压力轴承。
9、在本实用新型一些实施例中,所述第一卡臂和第二卡臂的自由端还转动连接有转轮,所述转轮的厚度及直径与所述防脱槽相匹配。
10、在本实用新型一些实施例中,所述转动驱动件为舵机,包括直流电机、减速齿轮组、传感器和控制电路,最大旋转角度小于180度。
11、在本实用新型一些实施例中,所述转盘的驱动角度为60~100度。
12、在本实用新型一些实施例中,所述第一连杆和第二连杆在所述转盘上的铰接点的间距大于所述转盘半径。
13、根据本实用新型的第二方面,还提供了一种线上行走装置,具有如第一方面所述的锁紧机构。
14、本实用新型的有益效果为:本实用新型通过锁紧机构的设置,使得设置在第一构件上的转动驱动件在转动设定角度后,使得转盘驱动连杆带动第一卡臂和第二卡臂卡设在固定在第二构件上的第一搭扣件和第二搭扣件上,实现第一构件和第二构件的锁紧,从而防止第一构件和第二构件在作业时的分离,提高了安全性和可靠性。
技术特征:
1.一种锁紧机构,其特征在于,该机构设置于可开合的第一构件和第二构件上,该机构包括固定在第一构件上的转动驱动件、与所述转动驱动件的输出轴连接的转盘、一端铰接在第一构件长度方向两端的第一卡臂和第二卡臂以及第一连杆和第二连杆,所述第一连杆的一端转动连接在所述转盘上,另一端转动连接在所述第一卡臂的中部,所述第二连杆转动连接在所述转盘上,另一端转动连接在所述第二卡臂的中部;
2.根据权利要求1所述的锁紧机构,其特征在于,所述第一搭扣件和第二搭扣件呈l型,包括长臂以及与所述长臂垂直的短臂,所述长臂固定在第二构件上,且部分突出于第二构件,所述短臂悬空设置,且所述第一搭扣件和第二搭扣件的短臂朝向靠近对方的方向。
3.根据权利要求2所述的锁紧机构,其特征在于,所述短臂在其厚度方向上的两侧还具有加强板,两所述加强板的宽度大于所述短臂的宽度,且在固定时与所述短臂的外周对齐,使得两所述加强板凸出于所述短臂的部分与所述短臂的内壁构成防脱槽。
4.根据权利要求3所述的锁紧机构,其特征在于,所述第一卡臂和第二卡臂呈l型,且自由端朝向远离对方的方向设置。
5.根据权利要求4所述的锁紧机构,其特征在于,所述第一卡臂和第二卡臂的铰接点底部还连接有压力轴承。
6.根据权利要求4所述的锁紧机构,其特征在于,所述第一卡臂和第二卡臂的自由端还转动连接有转轮,所述转轮的厚度及直径与所述防脱槽相匹配。
7.根据权利要求1所述的锁紧机构,其特征在于,所述转动驱动件为舵机,包括直流电机、减速齿轮组、传感器和控制电路,最大旋转角度小于180度。
8.根据权利要求7所述的锁紧机构,其特征在于,所述转盘的驱动角度为60~100度。
9.根据权利要求8所述的锁紧机构,其特征在于,所述第一连杆和第二连杆在所述转盘上的铰接点的间距大于所述转盘半径。
10.一种线上行走装置,其特征在于,具有如权利要求1至9所述的锁紧机构。
技术总结
本技术涉及线缆包裹机器人技术领域,尤其涉及一种锁紧机构及线上行走装置,该机构包括:该机构设置于可开合的第一构件和第二构件上,该机构包括固定在第一构件上的转动驱动件、与转动驱动件的输出轴连接的转盘、一端铰接在第一构件长度方向两端的第一卡臂和第二卡臂以及第一连杆和第二连杆,第一连杆和第二连杆的一端转动连接在转盘上,另一端转动连接在第一卡臂的中部;该机构还包括固定在第二构件上的第一搭扣和第二搭扣件,第一搭扣件和第二搭扣件分别固定第二构件上的两端,并且第一搭扣件与第一卡臂对应设置,第二搭扣件与第二卡臂对应设置;通过上述锁紧机构的设置防止了线上行走装置脱落,提高了可靠性与稳定性。
技术研发人员:丁坚强
受保护的技术使用者:江苏瑞禧智能电力科技有限公司
技术研发日:20230316
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!