一种震动马达驱动电路及扫地机器人的制作方法
本技术涉及控制电路,尤其涉及一种震动马达驱动电路及扫地机器人。
背景技术:
1、随着机器人的智能化发展,机器人的用途也越来越广泛,其中,扫地机器人能够实现清扫功能,减轻家庭的清扫负担,在很多家庭中都占据了重要角色。
2、目前,由于各家庭对清扫的次数和频率的要求不同,对扫地机器人的能耗提出高要求,传统技术通过减少元器件数量来降低能耗,然而并不能有效解决该问题。
技术实现思路
1、本实用新型提供了一种震动马达驱动电路及扫地机器人,通过在震动马达驱动电路中设置芯片、输入模块、输出模块和检测模块以简化电路,降低电路成本和使用能耗。
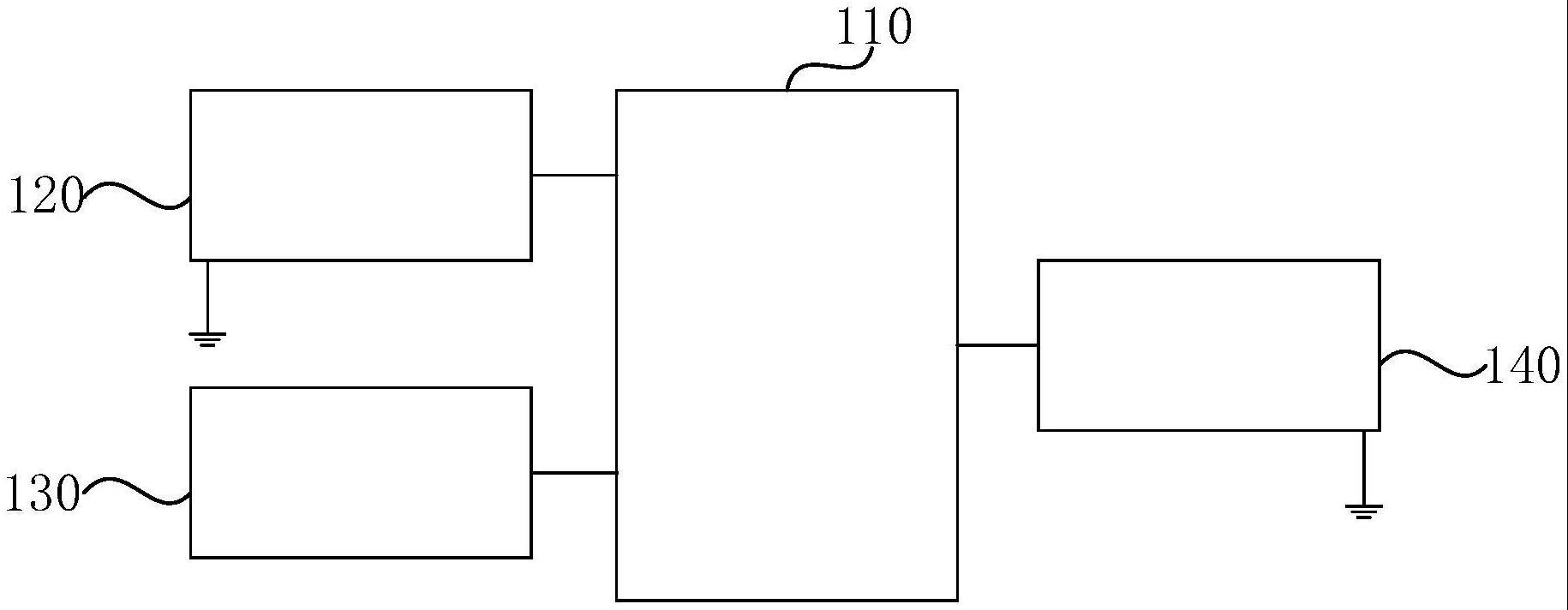
2、根据本实用新型的一方面,提供了一种震动马达驱动电路,具体包括:
3、芯片、输入模块、输出模块和检测模块;
4、输入模块的输入端与震动马达的外部控制信号端连接,输出端与芯片的输入端连接;
5、输出模块的输入端与芯片的输出端连接,输出端与震动马达连接;
6、检测模块的第一端与芯片的接地端连接,第二端与震动马达连接;
7、芯片还包括第一电源端和第二电源端,第一电源端与内部电源连接为芯片的内部逻辑控制电路供电,第二电源端与外部电源连接为芯片的外部驱动电路供电。
8、可选地,输入模块包括第一电阻、第二电阻和第三电阻,外部控制信号端包括第一脉冲调制信号端、第二脉冲调制信号端和使能信号端,芯片包括使能端;
9、第一电阻的第一端与第一脉冲调制信号端连接,第一电阻的第二端与芯片的第一输入端连接;
10、第二电阻的第一端与第二脉冲调制信号端连接,第二电阻的第二端与芯片的第二输入端连接;
11、第三电阻的第一端与使能信号端连接,第三电阻的第二端与芯片的使能端连接。
12、可选地,输出模块包括第一输入端和第二输入端;芯片包括第一输出端和第二输出端;
13、输出模块的第一输入端和芯片的第一输出端连接,输出模块的第一输出端与震动马达连接;
14、输出模块的第二输入端和芯片的第二输出端连接,输出模块的第二输出端与震动马达连接。
15、可选地,输出模块还包括磁珠和指拨开关;
16、磁珠包括第一磁珠和第二磁珠;
17、第一磁珠的第一端与芯片的第一输出端连接,第一磁珠的第二端与指拨开关的第一输入端连接,指拨开关的第一输出端与震动马达连接;
18、第二磁珠的第一端与芯片的第二输出端连接,第二磁珠的第二端与指拨开关的第二输入端连接,指拨开关的第二输出端与震动马达连接。
19、可选地,检测模块包括采样电阻、保护电阻、电容、检测电源和二极管;二极管包括第一二极管和第二二极管;
20、采样电阻的第一端与芯片的接地端连接,第二端接地;
21、采样电阻的第一端与保护电阻的第一端连接,保护电阻的第二端与检测模块的第二端连接;
22、电容的第一端与保护电阻的第二端连接,电容的第二端接地;
23、第一二极管与第二二极管并联,第一二极管的正极与电容的第二端连接,第一二极管的负极与保护电阻的第二端连接;
24、第二二极管的正极与第一二极管的负极连接,第二二极管的负极与检测电源连接;
25、芯片在检测模块检测到采样电阻的采用电压超过阈值电压时,控制震动马达停止工作。
26、可选地,震动马达驱动电路还包括保险丝,保险丝的第一端与芯片的第二电源端连接,第二端与外部电源连接。
27、可选地,震动马达驱动电路还包括第一电容,第一电容的第一端连接在芯片的第一电源端与内部电源之间,第二端接地。
28、可选地,震动马达驱动电路还包括第二电容和第三电容;
29、第二电容与第三电容并联,第二电容的第一端与第三电容的第一端连接,第二电容的第二端与第三电容的第二端连接,第二电容的第一端连接在保险丝的第一端,第二电容的第二端接地。
30、可选地,用二极管开关替换并联第一二极管和第二二极管结构;
31、二极管开关的第一输入端与电容的第二端连接,二极管开关的第一输入端与检测电源连接,二极管开关的输出端与保护电阻的第二端连接。
32、根据本实用新型的另一方面,提供了一种扫地机器人,包括:控制单元、上述任一的震动马达驱动电路、震动马达和清洁单元。
33、本实用新型公开了一种震动马达驱动电路,包括芯片、输入模块、输出模块和检测模块;输入模块的输入端与震动马达外部控制信号端连接,输出端与芯片的输入端连接;输出模块的输入端与芯片的输出端连接,输出端与震动马达连接;检测模块的第一端与芯片的接地端连接,第二端与震动马达连接;芯片还包括第一电源端和第二电源端,第一电源端与内部电源连接为芯片的内部逻辑控制电路供电,第二电源端与外部电源连接为芯片的外部驱动电路供电。通过设置具有芯片、输入模块、输出模块和检测模块的震动马达驱动电路以简化电路,降低电路成本和使用能耗。
34、应当理解,本部分所描述的内容并非旨在标识本实用新型的实施例的关键或重要特征,也不用于限制本实用新型的范围。本实用新型的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种震动马达驱动电路,其特征在于,包括:
2.根据权利要求1所述的震动马达驱动电路,其特征在于,所述输入模块包括第一电阻、第二电阻和第三电阻,所述外部控制信号端包括第一脉冲调制信号端、第二脉冲调制信号端和使能信号端,所述芯片包括使能端;
3.根据权利要求1所述的震动马达驱动电路,其特征在于,所述输出模块,包括第一输入端和第二输入端;所述芯片包括第一输出端和第二输出端;
4.根据权利要求3所述的震动马达驱动电路,其特征在于,所述输出模块还包括磁珠和指拨开关;
5.根据权利要求1所述的震动马达驱动电路,其特征在于,所述检测模块包括采样电阻、保护电阻、电容、检测电源和二极管;所述二极管包括第一二极管和第二二极管;
6.根据权利要求1所述的震动马达驱动电路,其特征在于,所述震动马达驱动电路还包括保险丝;
7.根据权利要求6所述的震动马达驱动电路,其特征在于,所述震动马达驱动电路还包括第一电容,所述第一电容的第一端连接在所述芯片的第一电源端与所述内部电源之间,第二端接地。
8.根据权利要求7所述的震动马达驱动电路,其特征在于,所述震动马达驱动电路还包括第二电容和第三电容,所述第二电容与所述第三电容并联,所述第二电容的第一端与所述第三电容的第一端连接,所述第二电容的第二端与所述第三电容的第二端连接,所述第二电容的第一端连接在所述保险丝的第一端,所述第二电容的第二端接地。
9.根据权利要求5所述的震动马达驱动电路,其特征在于,用二极管开关替换并联所述第一二极管和所述第二二极管结构;
10.一种扫地机器人,其特征在于,包括:控制单元、权利要求1-9中任一所述的震动马达驱动电路、震动马达和清洁单元。
技术总结
本技术公开了一种震动马达驱动电路及扫地机器人,包括芯片、输入模块、输出模块和检测模块;输入模块的输入端与震动马达外部控制信号端连接,输出端与芯片的输入端连接;输出模块的输入端与芯片的输出端连接,输出端与震动马达连接;检测模块的第一端与芯片的接地端连接,第二端与震动马达连接;芯片还包括第一电源端和第二电源端,第一电源端与内部电源连接为芯片的内部逻辑控制电路供电,第二电源端与外部电源连接为芯片的外部驱动电路供电。通过设置具有芯片、输入模块、输出模块和检测模块的震动马达驱动电路以简化电路,降低电路成本和使用能耗。
技术研发人员:王成均
受保护的技术使用者:深圳市云视机器人有限公司
技术研发日:20230316
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!