一种充电系统及磁悬浮列车的制作方法
本技术涉及充电,特别是涉及一种充电系统及磁悬浮列车。
背景技术:
1、随着科技的不断发展,智能机器人进入人们生活的方方面面,例如,在餐饮行业有智能点餐和上菜的机器人,在酒店可为用户送外卖的机器人等。在轨道交通行业中,为了缓解乘务员检票、引导乘客等工作量,机器人逐渐应用于高速磁浮列车。
2、为了保证机器人可完全替代乘务员的工作,续航问题在机器人研发过程中至关重要。
3、由此可见,如何解决机器人自主充电的问题,延长机器人续航,提升用户体验感,是本领域技术人员亟待解决的问题。
技术实现思路
1、本实用新型的目的是提供一种充电系统及磁悬浮列车,实现机器人自主充电,延长机器人续航,提升用户体验感。
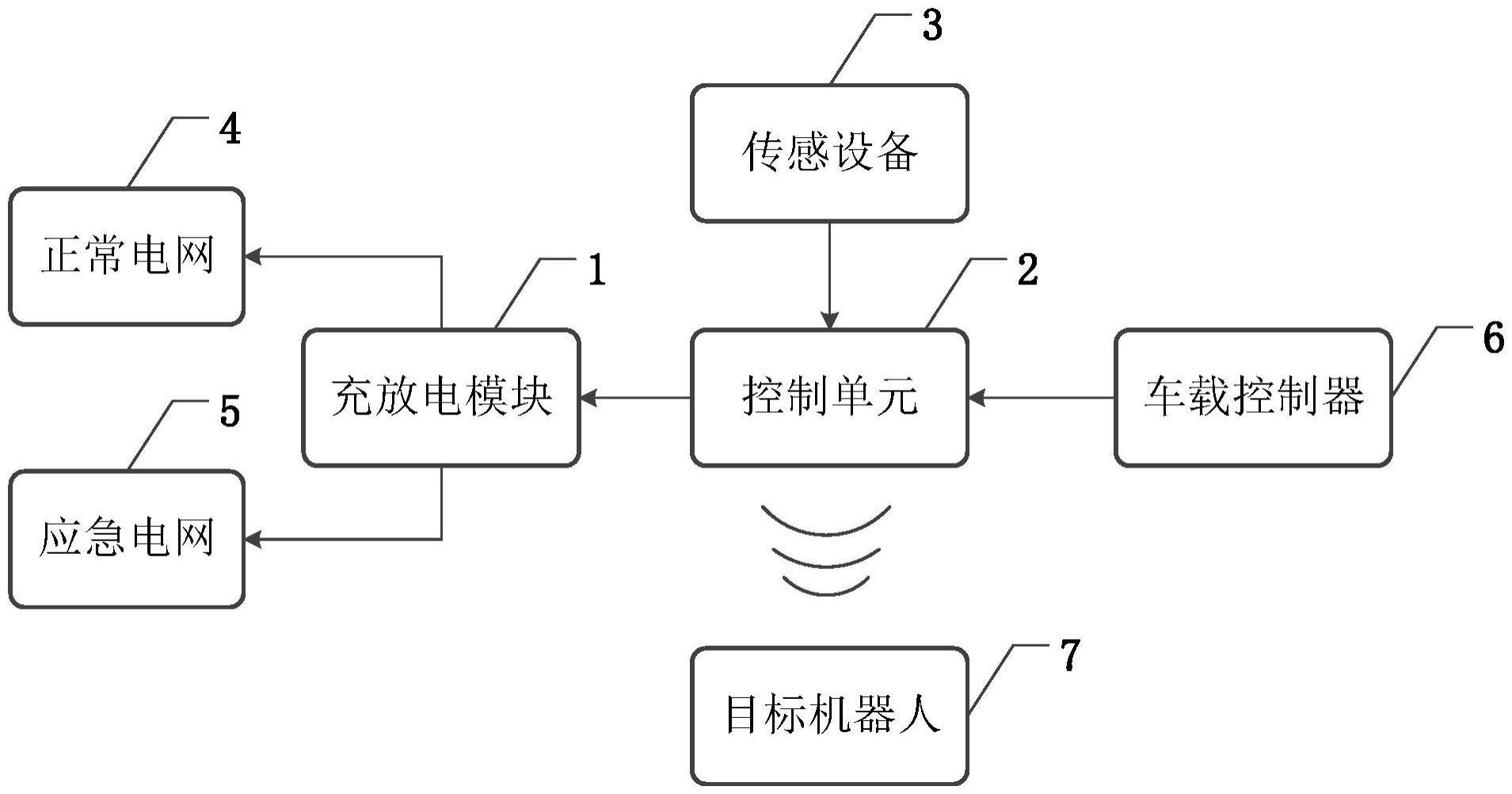
2、为解决上述技术问题,本实用新型提供一种充电系统,包括:充放电模块、传感设备和控制单元;
3、所述传感设备与所述控制单元连接,用于将采集到的目标机器人的在位信号传输至所述控制单元;
4、所述充放电模块分别与所述控制单元、正常电网和应急电网连接,用于在接收到所述控制单元发送的充电信号后与所述目标机器人连接以便为所述目标机器人进行充电,或在接收到所述控制单元发送的放电信号后与所述目标机器人连接以便将所述目标机器人电能放电至所述应急电网;
5、所述控制单元与车载控制器连接,并与所述目标机器人无线连接,用于生成所述充电信号、所述放电信号和驱动所述目标机器人的驱动指令。
6、其中,所述充放电模块包括锂电池、第一pwm控制器、第二pwm控制器、buck电路和boost电路;
7、所述buck电路分别与所述正常电网、所述锂电池和所述第一pwm控制器连接,用于在接收到所述第一pwm控制器的控制信号后为所述锂电池充电;
8、所述boost电路分别与所述应急电网、所述锂电池和所述第二pwm控制器连接,用于在接收到所述第二pwm控制器的控制信号后将所述锂电池中的电能放电至所述应急电网中。
9、其中,所述buck电路包括:变压器,第一电容,第二电容,电阻,二极管,第一开关管和第一接触器;
10、所述变压器的发射线圈一端与所述电阻的一端连接,所述电阻的另一端与所述二极管的负极连接产生的公共端与所述第二电容的一端连接,所述二极管的正极与所述发射线圈的另一端连接产生的公共端与所述第一开关管的第一连接端连接;
11、所述第一开关管的第二连接端与所述第二电容的另一端连接产生的公共端与所述第一接触器的一端连接,所述第一接触器的另一端与所述正常电网的正极连接,所述二极管的负极与所述正常电网的负极连接;所述第一开关管的控制端作为所述buck电路的信号输入端与所述第一pwm控制器连接;
12、所述变压器的接收线圈与所述第一电容并联产生的第一公共端和第二公共端分别与所述锂电池正极和负极连接。
13、其中,所述boost电路包括:电感,第二开关管和第二接触器;
14、所述电感一端与所述第二开关管的第一连接端连接产生的公共端作与所述应急电网的正极连接,另一端与多数第二接触器的一端连接,所述第二接触器的另一端与所述锂电池的正极连接;
15、所述第二开关管的第二连接端与所述锂电池的负极连接产生的公共端与所述应急电网的负极连接,所述第二开关管的控制端作为与所述第二pwm控制器连接的连接端。
16、其中,所述boost电路还包括:防反二极管;
17、所述防反二极管连接与所述第二接触器与所述电感间;其中,所述防反二极管的正极与所述电感连接,所述防反二极管的负极与所述第二接触器连接。
18、其中,所述传感设备包括压力传感器,且所述压力传感器为多个。
19、优选地,压力传感器为4个,4个压力传感器分别与目标机器人的底座的4个角对应。
20、优选地,还包括放电连接器、无线充电背板槽和弹动机构,放电连接器通过弹动机构放置于无线充电背板槽内,在机器人在位的情况下,放电连接器通过弹动机构弹出无线充电背板槽,用于与目标机器人底部设置的放电插座连接。
21、优选地,还包括锁闭机构,锁闭机构用于锁闭放电连接器和放电插座。
22、为了解决上述技术问题,本申请还提供了一种磁悬浮列车,包括所述的充电系统。
23、本实用新型所提供的一种充电系统,包括:充放电模块、传感设备和控制单元。传感设备与控制单元连接,在采集到的目标机器人的在位信号时,将在位信号传输至控制单元,此时,控制单元生成充电信号并传输至与控制单元连接的充放电模块。充放电模块还与正常电网和应急电网连接,在接收到充电信号时为目标机器人充电,或在接收到放电信号时将目标机器人中的电能放电至应急电网。控制单元还与车载控制器连接,并与目标机器人无线连接,在接收到车载控制器发送的放电指令后生成放电信号和驱动指令,并将驱动指令通过无线通讯发送给目标机器人,以便目标机器人移动至充电系统上实现放电。
24、由此可见,本申请所提供的技术方案,除了可以在传感设备检测到目标机器人的在位信号后正常为目标机器人进行充电外,还可以在应急工况下,接受到车载控制器的放电指令后,将目标机器人中的电能放电至应急电网中,即,保证机器人可随时自主充电延长续航的情况下,还可以在应急工况下,通过放电的形式延长救援时间,提升充电系统的多样性和可靠性,提升用户体验感。
25、此外,本申请还提供了一种磁悬浮列车,与上述充电系统相对应,效果同上。
技术特征:
1.一种充电系统,其特征在于,包括:充放电模块、传感设备和控制单元;
2.根据权利要求1所述的充电系统,其特征在于,所述充放电模块包括锂电池、第一pwm控制器、第二pwm控制器、buck电路和boost电路;
3.根据权利要求2所述的充电系统,其特征在于,所述buck电路包括:变压器,第一电容,第二电容,电阻,二极管,第一开关管和第一接触器;
4.根据权利要求2所述的充电系统,其特征在于,所述boost电路包括:电感,第二开关管和第二接触器;
5.根据权利要求4所述的充电系统,其特征在于,所述boost电路还包括:防反二极管;
6.根据权利要求1-5任意一项所述的充电系统,其特征在于,所述传感设备包括压力传感器,且所述压力传感器为多个。
7.根据权利要求6所述的充电系统,其特征在于,所述压力传感器为4个,4个所述压力传感器分别与所述目标机器人的底座的4个角对应。
8.根据权利要求1所述的充电系统,其特征在于,还包括放电连接器、无线充电背板槽和弹动机构,所述放电连接器通过弹动机构放置于所述无线充电背板槽内,在所述目标机器人在位的情况下,所述放电连接器通过弹动机构弹出所述无线充电背板槽,用于与所述目标机器人底部设置的放电插座连接。
9.根据权利要求8所述的充电系统,其特征在于,还包括锁闭机构,所述锁闭机构用于锁闭所述放电连接器和所述放电插座。
10.一种磁悬浮列车,其特征在于,包括权利要求1至9任意一项所述的充电系统。
技术总结
本技术涉及充电技术领域,公开了一种充电系统及磁悬浮列车,包括:充放电模块、传感设备和控制单元。传感设备与控制单元连接,用于将采集到的目标机器人的在位信号传输至控制单元,此时,控制单元生成充电信号并传输至与其连接的充放电模块。充放电模块还与正常电网和应急电网连接,在接收到充电信号时为目标机器人充电,或在接收到放电信号时将目标机器人中的电能放电至应急电网。控制单元还与车载控制器连接,且与目标机器人无线连接,用于生成充电信号、放电信号和驱动机器人的驱动指令。由此,可在正常工况下为机器人正常充电,延长机器人续航,还可以在应急工况下,将机器人中的电能放电至应急电网延长救援时间,提升用户体验感。
技术研发人员:王博,邓桂美,王贺,刘浩炳
受保护的技术使用者:中车青岛四方机车车辆股份有限公司
技术研发日:20230423
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!