一种刹车结构、行走架结构及检修机器人的制作方法
本技术涉及检修设备,具体而言,涉及一种刹车结构、行走架结构及检修机器人。
背景技术:
1、随着我国电网规模日趋庞大,输变电设备存量逐步增加,借助智能化信息技术对电力各环节进行实时监测、日常巡检、维修、保证整体电力系统运行安全健康的作用凸显。
2、采用传统的人工巡检、维修除了风险系数高,还存在人力成本日渐增加、工作效率存在瓶颈等众多问题;在现有技术中,为了保证线路巡检的安全性,通常采用巡检机器人替代人工作业,当巡检机器人到达检修位置时,如何实现检修机器人的停止,且能够维持位置的稳定性,是亟需解决的技术问题。
3、有鉴于此,特此提出本申请。
技术实现思路
1、针对于上述问题,本实用新型实施例提供了一种刹车结构、行走架结构及检修机器人,通过结构设计,在利用所述刹车结构进行刹车时,通过所述动力组件驱动所述配合端的靠近从而实现对线缆的包覆,从而锁定检修机器人,实现检修机器人的停止,且能够维持位置的稳定性。
2、本实用新型通过下述技术方案实现:
3、第一方面
4、本实用新型实施例提供了一种刹车结构,包括两个刹车夹爪以及动力组件,所述刹车夹爪的一端为用于与线路配合的配合端,所述动力组件用于驱动两个所述配合端靠近或远离。
5、在本方案中,所述刹车结构包括两个刹车夹爪以及动力组件,所述刹车夹爪的一端为用于与线路配合的配合端,所述动力组件用于驱动两个所述配合端靠近或远离,通过刹车结构的结构设计,当利用所述刹车结构进行刹车时,通过所述动力组件驱动所述配合端的靠近从而实现对线缆的包覆,从而锁定。
6、进一步的,所述动力组件为直线驱动模组,所述直线驱动模组的伸缩端与两个所述刹车夹爪的一端连接,当所述直线驱动模组伸缩时,两个所述配合端靠近或远离。
7、进一步的,还包括固定板,所述固定板设置有固定座,所述固定座的两侧分别与两个所述刹车夹爪可转动连接,且所述固定座与所述刹车夹爪的连接位置位于所述刹车夹爪的两端之间。
8、进一步的,所述固定板还设置有让位孔,所述刹车夹爪的两端分别位于所述让位孔的两侧。
9、进一步的,所述让位孔为两个,两个所述让位孔分别位于所述固定座的两侧,且所述固定座的两侧在所述固定板所在平面的投影落在所述让位孔的范围内。
10、进一步的,所述直线驱动模组的伸缩方向与所述固定板所在的平面垂直设置,且所述直线驱动模组的伸缩端通过连杆结构与所述刹车夹爪连接。
11、进一步的,所述连杆结构包括两个连杆,两个所述连杆的一端与所述直线驱动模组的伸缩端可转动连接,其中一个所述连杆的一端与其中一个所述刹车夹爪的一端连接,其中另一个所述连杆的一端与其中另一个所述刹车夹爪的一端连接。
12、第二方面
13、本实用新型实施例还提供了一种行走架结构,包括上述的刹车结构,还包括行走架本体,所述行走架本体包括间隔设置的两个导向单元,两个导向单元间隔设置,两个所述导向单元之间通过连接杆连接,所述固定板的两端与所述连接杆连接。
14、进一步的,所述固定板的两端设置有延长板,所述固定板通过所述延长板与所述连接杆连接。
15、第三方面
16、本实用新型实施例还提供了一种检修机器人,包括上述的一种行走架结构,还包括驱动结构,所述驱动结构与所述行走架结构连接用于实现所述行走架结构的运动。
17、本实用新型与现有技术相比,具有如下的优点和有益效果:
18、本实用新型实施例提供了一种刹车结构、行走架结构及检修机器人,该刹车结构包括两个刹车夹爪以及动力组件,所述刹车夹爪的一端为用于与线路配合的配合端,所述动力组件用于驱动两个所述配合端靠近或远离,通过刹车结构的结构设计,当利用所述刹车结构进行刹车时,通过所述动力组件驱动所述配合端的靠近从而实现对线缆的包覆,从而锁定。
技术特征:
1.一种刹车结构,其特征在于,包括两个刹车夹爪(410)以及动力组件(420),所述刹车夹爪(410)的一端为用于与线路配合的配合端,所述动力组件(420)用于驱动两个所述配合端靠近或远离。
2.根据权利要求1所述的一种刹车结构,其特征在于,所述动力组件(420)为直线驱动模组,所述直线驱动模组的伸缩端与两个所述刹车夹爪(410)的一端连接,当所述直线驱动模组伸缩时,两个所述配合端靠近或远离。
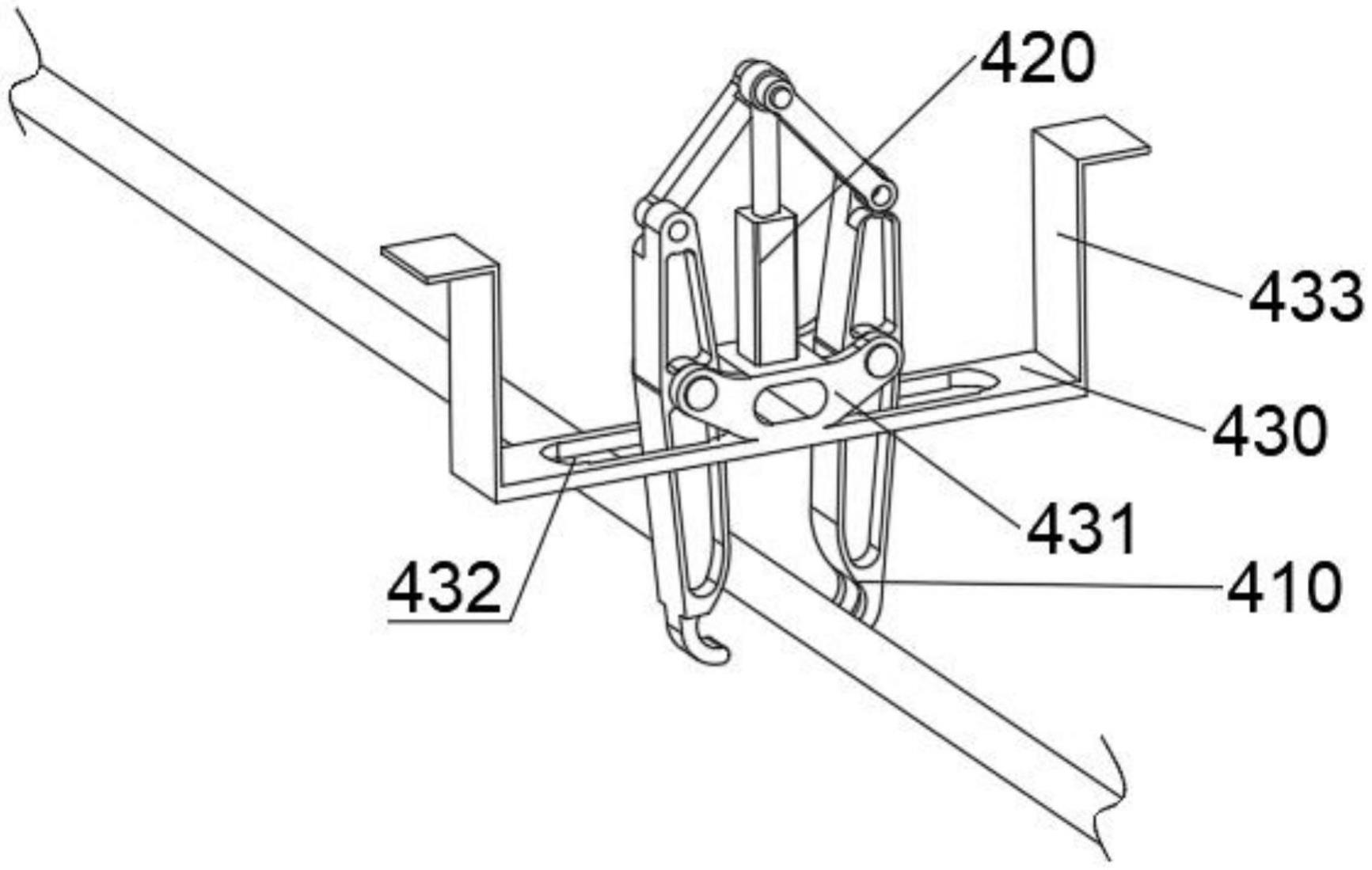
3.根据权利要求2所述的一种刹车结构,其特征在于,还包括固定板(430),所述固定板(430)设置有固定座(431),所述固定座(431)的两侧分别与两个所述刹车夹爪(410)可转动连接,且所述固定座(431)与所述刹车夹爪(410)的连接位置位于所述刹车夹爪(410)的两端之间。
4.根据权利要求3所述的一种刹车结构,其特征在于,所述固定板(430)还设置有让位孔(432),所述刹车夹爪(410)的两端分别位于所述让位孔的两侧。
5.根据权利要求4所述的一种刹车结构,其特征在于,所述让位孔(432)为两个,两个所述让位孔(432)分别位于所述固定座(431)的两侧,且所述固定座(431)的两侧在所述固定板(430)所在平面的投影落在所述让位孔(432)的范围内。
6.根据权利要求5所述的一种刹车结构,其特征在于,所述直线驱动模组的伸缩方向与所述固定板(430)所在的平面垂直设置,且所述直线驱动模组的伸缩端通过连杆结构与所述刹车夹爪(410)连接。
7.根据权利要求6所述的一种刹车结构,其特征在于,所述连杆结构包括两个连杆(440),两个所述连杆(440)的一端与所述直线驱动模组的伸缩端可转动连接,其中一个所述连杆(440)的一端与其中一个所述刹车夹爪(410)的一端连接,其中另一个所述连杆(440)的一端与其中另一个所述刹车夹爪(410)的一端连接。
8.一种行走架结构,其特征在于,包括权利要求3-7任一所述的刹车结构,还包括行走架本体,所述行走架本体包括间隔设置的两个导向单元(210),两个导向单元(210)间隔设置,两个所述导向单元(210)之间通过连接杆(220)连接,所述固定板(430)的两端与所述连接杆(220)连接。
9.根据权利要求8所述的一种行走架结构,其特征在于,所述固定板(430)的两端设置有延长板(433),所述固定板(430)通过所述延长板(433)与所述连接杆(220)连接。
10.一种检修机器人,其特征在于,包括权利要求8或9所述的一种行走架结构,还包括驱动结构,所述驱动结构与所述行走架结构连接用于实现所述行走架结构的运动。
技术总结
本技术公开了一种刹车结构、行走架结构及检修机器人,该刹车结构包括两个刹车夹爪以及动力组件,所述刹车夹爪的一端为用于与线路配合的配合端,所述动力组件用于驱动两个所述配合端靠近或远离,通过刹车结构的结构设计,在利用所述刹车结构进行刹车时,通过所述动力组件驱动所述配合端的靠近从而实现对线缆的包覆,从而锁定检修机器人,实现检修机器人的停止,且能够维持位置的稳定性。
技术研发人员:田裕夫
受保护的技术使用者:成都恒羽科技有限公司
技术研发日:20230427
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!