一种智能机器人触点式充电结构的制作方法
本技术涉及智能机器人充电结构,具体为一种智能机器人触点式充电结构。
背景技术:
1、智能机器人触点是模拟人类行为或思想,亦或者模拟其他生物的机械(如机器狗,机器猫等)智,能机器人触点具备内部信息传感器和外部信息传感器,如视觉、听觉、触觉或嗅觉,除具有感受器外,它还有效应器作为作用于周围环境的手段,多为自整步电动机,类似于筋肉,它们使手或脚动起来,还有一些灯光或声音作为回应。现有的智能机器人触点内部均携带有蓄电池,通过蓄电池驱动上述效应器工作。
2、然而,现有的装置充电结构操作比较麻烦,且充电结构效果比较差。
技术实现思路
1、本实用新型的目的在于提供一种智能机器人触点式充电结构,具有充电结构操作比较简单,且充电时候的可靠性高的优点,解决了现有技术中的问题。
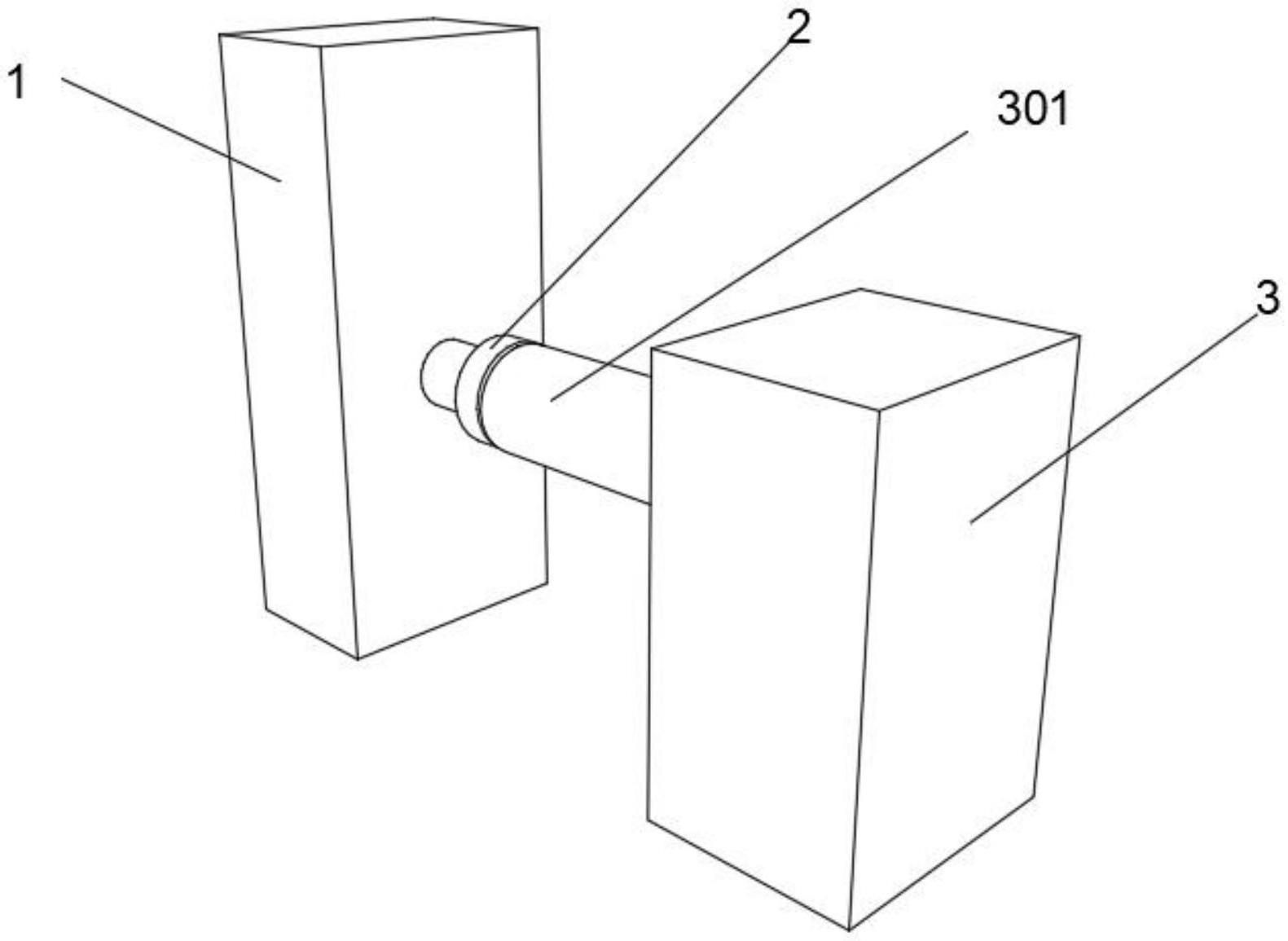
2、为实现上述目的,本实用新型提供如下技术方案:其特征在于:包括:充电桩,其左表面设有多个螺栓;
3、机器人,其设置在充电桩的左侧,所述机器人的右侧设有连接座,所述连接座的右侧端面设有动磁铁,所述连接座的右侧设有充电座,所述充电座的右侧有弧度;
4、充电固定座,其设置在充电桩的左侧,所述充电固定座位于所述机器人的右侧,所述充电固定座的左侧端面设有定磁铁,所述充电固定座内设有滑槽,所述滑槽的内部左端滑动安装有滑柱,所述滑柱的左侧面开设有第一充电槽,所述第一充电槽内固定安装有第一触点式充电块,所述第一触点式充电块位于所述第一充电槽内。
5、优选的,所述充电座的右侧面开设有有第二充电槽,所述第二充电槽内固定安装有第二触点式充电块,所述第二触点式充电块的右端与所述第一触点式充电块的左端接触,所述第二触点式充电块与所述第一触点式充电块电性接触。
6、优选的,所述滑柱上开设有滑动腔,所述滑动腔的右侧内壁上开设有滑孔,所述滑孔内滑动安装有滑杆,所述滑杆的左端延伸至滑动腔内并焊接有卡板。
7、优选的,所述卡板的左端焊接有弹簧,所述弹簧的左端与对应的滑动腔的右侧内壁相焊接。
8、优选的,所述滑槽的右侧内壁安装有推杆电机,所述推杆电机位于所述滑柱的右侧,所述推杆电机的输出轴上焊接有推动板,所述推动板位于所述滑柱的右侧,所述推动板与所述滑杆焊接。
9、优选的,所述滑槽的内壁上方开设有限位槽,所述推动板的上方焊接有限位板,所述限位板与所述限位槽相适配,所述限位板与对应的限位槽滑动连接,所述限位板的左侧与对应的限位槽的右侧内壁相接触,所述推动板与所述限位板固定连接,所述推动板与对应的所述滑槽的侧壁滑动连接。
10、优选的,所述机器人内部固定安装有蓄电池,所述第二触点式充电块与第一触点式充电块电性接触,可对蓄电池进行充电工作。
11、与现有技术相比,本实用新型的有益效果如下:
12、1.本一种智能机器人触点式充电结构通过第二触点式充电块与第一触点式充电块电性接触,可对蓄电池进行充电工作,有利于对机器人进行充电,通过设置的定磁铁和动磁铁,能够确保充电座牢牢的插入在滑槽内部,有利于提高充电时候的可靠性。
技术特征:
1.一种智能机器人触点式充电结构,其特征在于:包括:
2.根据权利要求1所述的一种智能机器人触点式充电结构,其特征在于:所述充电座(202)的右侧面开设有有第二充电槽(203),所述第二充电槽(203)内固定安装有第二触点式充电块(204),所述第二触点式充电块(204)的右端与所述第一触点式充电块(309)的左端接触,所述第二触点式充电块(204)与所述第一触点式充电块(309)电性接触。
3.根据权利要求1所述的一种智能机器人触点式充电结构,其特征在于:所述滑柱(304)上开设有滑动腔(313),所述滑动腔(313)的右侧内壁上开设有滑孔(315),所述滑孔(315)内滑动安装有滑杆(314),所述滑杆(314)的左端延伸至滑动腔(313)内并焊接有卡板(312)。
4.根据权利要求3所述的一种智能机器人触点式充电结构,其特征在于:所述卡板(312)的左端焊接有弹簧(311),所述弹簧(311)的左端与对应的滑动腔(313)的右侧内壁相焊接。
5.根据权利要求1所述的一种智能机器人触点式充电结构,其特征在于:所述滑槽(303)的右侧内壁安装有推杆电机(308),所述推杆电机(308)位于所述滑柱(304)的右侧,所述推杆电机(308)的输出轴上焊接有推动板(305),所述推动板(305)位于所述滑柱(304)的右侧,所述推动板(305)与所述滑杆(314)焊接。
6.根据权利要求1所述的一种智能机器人触点式充电结构,其特征在于:所述滑槽(303)的内壁上方开设有限位槽(307),所述推动板(305)的上方焊接有限位板(306),所述限位板(306)与所述限位槽(307)相适配,所述限位板(306)与对应的限位槽(307)滑动连接,所述限位板(306)的左侧与对应的限位槽(307)的右侧内壁相接触,所述推动板(305)与所述限位板(306)固定连接,所述推动板(305)与对应的所述滑槽(303)的侧壁滑动连接。
7.根据权利要求1所述的一种智能机器人触点式充电结构,其特征在于:所述机器人(1)内部固定安装有蓄电池,所述第二触点式充电块(204)与第一触点式充电块(309)电性接触,可对蓄电池进行充电工作。
技术总结
一种智能机器人触点式充电结构,它涉及智能机器人充电结构技术领域,它包括:充电桩,其左表面设有多个螺栓,机器人,其设置在充电桩的左侧,机器人的右侧设有连接座,连接座的右侧端面设有动磁铁,连接座的右侧设有充电座,充电座的右侧有弧度,充电固定座,其设置在充电桩的左侧,充电固定座位于机器人的右侧,充电固定座的左侧端面设有定磁铁,充电固定座内设有滑槽,滑槽的内部左端滑动安装有滑柱,滑柱的左侧面开设有第一充电槽,第一充电槽内固定安装有第一触点式充电块,第一触点式充电块位于第一充电槽内;本一种智能机器人触点式充电结构具有充电结构操作比较简单,且充电时候的可靠性高的优点。
技术研发人员:黄晓君
受保护的技术使用者:黄晓君
技术研发日:20230525
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!