一种定位机器人电机转子铁芯机构的制作方法
本技术涉及一种转子铁芯机构,具体为定位机器人电机转子铁芯机构,属于电机。
背景技术:
1、机器人是自动执行工作的机器装置。机器人可接受人类指挥,也可以执行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。机器人由各个关节部件组成,而关节与关节之间一般是通过电机驱动机构进行连接的,以实现机器人的工作,随着科技的进步,机器人用的永磁同步电机的转速越来越高,转轴与转子铁芯的固定结构是否牢靠,对电机的整机运行寿命和可靠程度有着至关重要的作用。
2、目前永磁同步电机的转轴与转子铁芯的固定,主要有两种方式,其一:转子铁芯与转轴之间采用过盈配合方式压入固定;其二:转轴与转子铁芯之间径向通过键与键槽的配合,防止径向松动,轴向采用圆螺母加止动垫圈,通过螺纹的方式固定,然而机器人电机在高速旋转、频繁启停、正反旋转工作条件下,转子铁芯与轴间只靠过盈配合防止径向和轴向固态可靠性较差,容易导致铁芯与转轴之间发生位移,而采用键与键槽配合的方式连接,螺母的止动垫圈在电机高速旋转过程中会产生较大的离心力,一旦止动垫圈开裂,高速过程中将会甩出止动垫圈,从而刮伤电机定子线圈,从而导致电机烧毁,为此,提出一种定位机器人电机转子铁芯机构。
技术实现思路
1、有鉴于此,本实用新型希望提供一种定位机器人电机转子铁芯机构,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
2、本实用新型实施例的技术方案是这样实现的:一种定位机器人电机转子铁芯机构,包括安装组件,所述安装组件包括四个限位块、第一斜面、限位孔、两个插槽、第二斜面、挡块、两个导向柱、弹簧、两个插块、避让槽、电机轴、限位柱、四个定位块、安装环和插孔;
3、四个所述限位块的相邻面对称焊接于所述电机轴的外侧壁,所述第一斜面开设于所述限位块的后表面,所述限位孔开设于所述限位块的内部,两个所述插槽对称开设于所述限位块的前表面,所述挡块滑动连接于两个所述导向柱的外侧壁,两个所述插块对称焊接于所述挡块的后表面,所述弹簧套接于所述导向柱的外侧壁,四个所述定位块的前表面对称固定连接于所述安装环的后表面,所述插孔开设于所述定位块的内部,所述避让槽开设于所述挡块的下表面,所述第二斜面开设于所述挡块的前表面,所述限位柱滑动连接于所述插孔的内侧壁。
4、进一步优选的,所述插块的外侧壁滑动连接于所述插槽的内侧壁,所述限位块的前表面贴合于所述挡块的后表面。
5、进一步优选的,所述定位块的后表面贴合于所述限位块的前表面,所述挡块的下表面和所述第二斜面均贴合于所述定位块的上表面。
6、进一步优选的,所述限位柱的外侧壁分别滑动连接于所述限位孔的内侧壁和所述避让槽的内侧壁。
7、进一步优选的,四个所述定位块的相邻面对称滑动连接于所述电机轴的外侧壁,所述安装环套接于所述电机轴的外侧壁。
8、进一步优选的,所述安装环的后表面安装有铁芯组件,所述铁芯组件包括转子铁芯、转子齿、转子槽、转轴孔、四个凹槽、限位槽和两个滑槽;
9、所述安装环的后表面焊接于所述转子铁芯的前表面。
10、进一步优选的,所述转轴孔开设于所述转子铁芯的内部,四个所述凹槽对称开设于所述转轴孔的内侧壁,所述电机轴的外侧壁滑动连接于所述转轴孔的内侧壁。
11、进一步优选的,所述限位槽开设于所述凹槽的内顶壁,两个所述滑槽对称开设于所述限位槽的内后壁,所述限位柱的后端固定连接于所述凹槽的内后壁。
12、进一步优选的,所述限位块和定位块均滑动连接于所述凹槽的内侧壁,所述挡块滑动连接于所述限位槽的内侧壁,所述滑槽的位置与所述插块的位置相对应,所述弹簧的一端固定连接于所述挡块远离所述电机轴的一侧,所述弹簧的另一端固定连接于所述限位槽的内顶壁,所述导向柱的顶端固定连接于所述限位槽的内顶壁。
13、进一步优选的,所述转子齿等距固定连接于所述转子铁芯的外侧壁,所述转子槽位于相邻的两个所述转子齿之间,所述安装环的后表面固定连接于所述转子铁芯的前表面。
14、本实用新型实施例由于采用以上技术方案,其具有以下优点:
15、一、本实用新型通过电机轴带动限位块沿着限位柱滑动,限位块通过第一斜面推动第二斜面,同时弹簧受力被压缩,当限位块与挡块脱离时,弹簧推动挡块,挡块的后表面与限位块的前表面贴合,同时插块插入至插槽内,进而可以通过挡块对限位块的位置进行限定,通过插块和插槽的配合,可以将挡块与限位块连接成整体,进而增加了结构的稳定性;
16、二、本实用新型通过安装环带动定位块插入至凹槽内,并将安装环焊接于转子铁芯的表面,进而通过定位块对限位块的位置进行再次限定,通过采用四个限位块,增大了电机轴与转子铁芯的接触面积,进而增加了工作时电机轴的可靠性,而且通过定位块和挡块的双重限位,可以有效的限定限位块的位置,通过限位块可以限定电机轴的位置,进而增加了电机运行时的稳定性。
17、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种定位机器人电机转子铁芯机构,包括安装组件(101),其特征在于:所述安装组件(101)包括四个限位块(11)、第一斜面(13)、限位孔(14)、两个插槽(15)、第二斜面(16)、挡块(17)、两个导向柱(18)、弹簧(19)、两个插块(20)、避让槽(21)、电机轴(22)、限位柱(23)、四个定位块(24)、安装环(25)和插孔(26);
2.根据权利要求1所述的一种定位机器人电机转子铁芯机构,其特征在于:所述插块(20)的外侧壁滑动连接于所述插槽(15)的内侧壁,所述限位块(11)的前表面贴合于所述挡块(17)的后表面。
3.根据权利要求1所述的一种定位机器人电机转子铁芯机构,其特征在于:所述定位块(24)的后表面贴合于所述限位块(11)的前表面,所述挡块(17)的下表面和所述第二斜面(16)均贴合于所述定位块(24)的上表面。
4.根据权利要求1所述的一种定位机器人电机转子铁芯机构,其特征在于:所述限位柱(23)的外侧壁分别滑动连接于所述限位孔(14)的内侧壁和所述避让槽(21)的内侧壁。
5.根据权利要求3所述的一种定位机器人电机转子铁芯机构,其特征在于:四个所述定位块(24)的相邻面对称滑动连接于所述电机轴(22)的外侧壁,所述安装环(25)套接于所述电机轴(22)的外侧壁。
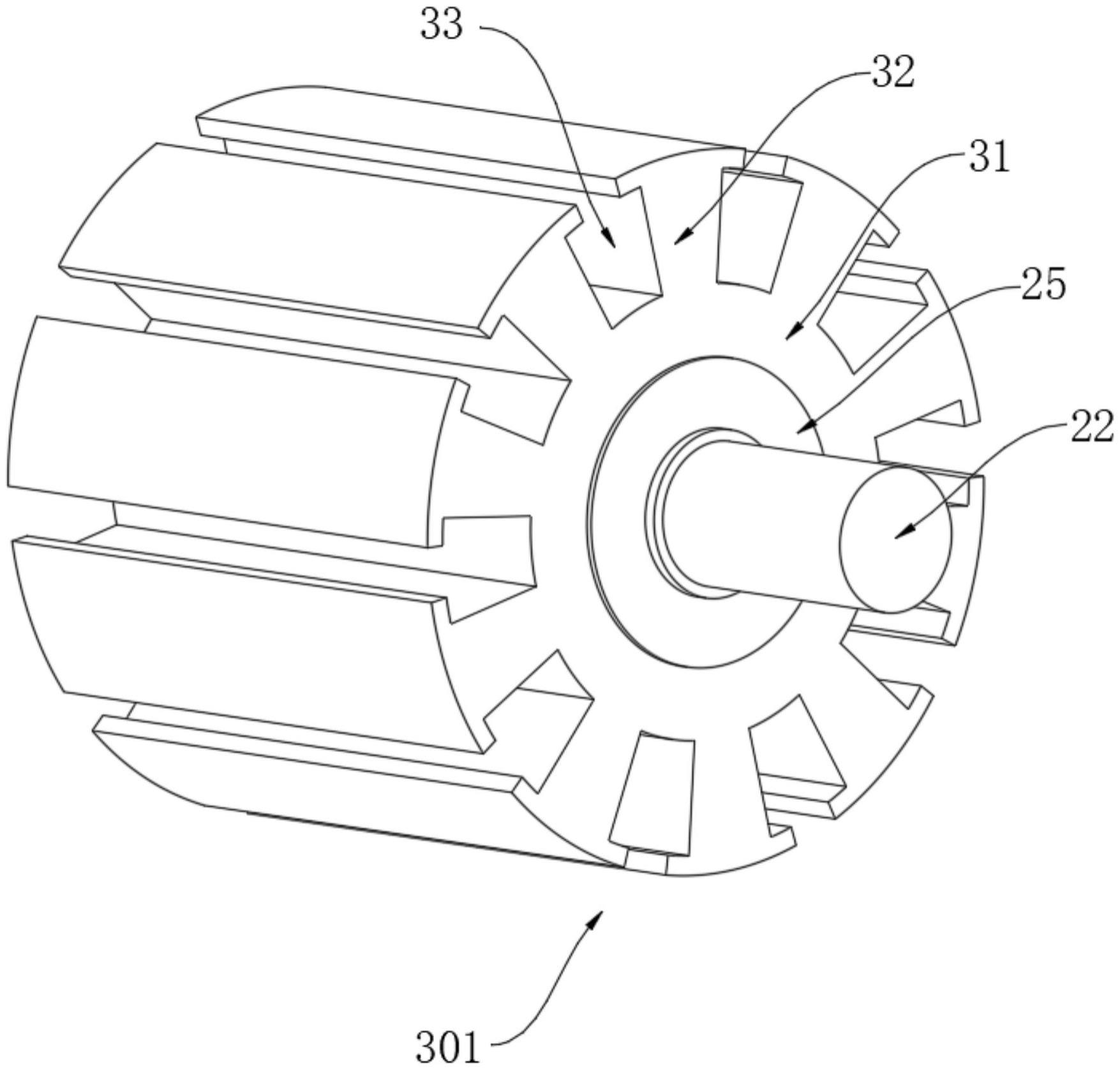
6.根据权利要求5所述的一种定位机器人电机转子铁芯机构,其特征在于:所述安装环(25)的后表面安装有铁芯组件(301),所述铁芯组件(301)包括转子铁芯(31)、转子齿(32)、转子槽(33)、转轴孔(34)、四个凹槽(35)、限位槽(36)和两个滑槽(37);
7.根据权利要求6所述的一种定位机器人电机转子铁芯机构,其特征在于:所述转轴孔(34)开设于所述转子铁芯(31)的内部,四个所述凹槽(35)对称开设于所述转轴孔(34)的内侧壁,所述电机轴(22)的外侧壁滑动连接于所述转轴孔(34)的内侧壁。
8.根据权利要求6所述的一种定位机器人电机转子铁芯机构,其特征在于:所述限位槽(36)开设于所述凹槽(35)的内顶壁,两个所述滑槽(37)对称开设于所述限位槽(36)的内后壁,所述限位柱(23)的后端固定连接于所述凹槽(35)的内后壁。
9.根据权利要求8所述的一种定位机器人电机转子铁芯机构,其特征在于:所述限位块(11)和定位块(24)均滑动连接于所述凹槽(35)的内侧壁,所述挡块(17)滑动连接于所述限位槽(36)的内侧壁,所述滑槽(37)的位置与所述插块(20)的位置相对应,所述弹簧(19)的一端固定连接于所述挡块(17)远离所述电机轴(22)的一侧,所述弹簧(19)的另一端固定连接于所述限位槽(36)的内顶壁,所述导向柱(18)的顶端固定连接于所述限位槽(36)的内顶壁。
10.根据权利要求6所述的一种定位机器人电机转子铁芯机构,其特征在于:所述转子齿(32)等距固定连接于所述转子铁芯(31)的外侧壁,所述转子槽(33)位于相邻的两个所述转子齿(32)之间,所述安装环(25)的后表面固定连接于所述转子铁芯(31)的前表面。
技术总结
本技术提供了一种定位机器人电机转子铁芯机构,包括安装组件,所述安装组件包括四个限位块、第一斜面、限位孔、两个插槽、第二斜面、挡块、两个导向柱、弹簧、两个插块、避让槽、电机轴、限位柱、四个定位块、安装环和插孔;四个所述限位块的相邻面对称焊接于所述电机轴的外侧壁。本技术通过安装环带动定位块插入至凹槽内,并将安装环焊接于转子铁芯的表面,进而通过定位块对限位块的位置进行再次限定,通过采用四个限位块,增大了电机轴与转子铁芯的接触面积,进而增加了工作时电机轴的可靠性,可以有效的限定限位块的位置,通过限位块可以限定电机轴的位置,进而增加了电机运行时的稳定性。
技术研发人员:雷海峰,刘霄,刘顺,华永通
受保护的技术使用者:深圳小象电动科技有限公司
技术研发日:20230526
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!