一种多电池的充放电管理系统的制作方法
本技术涉及一种多电池的充放电管理系统,尤其涉及智能机器人的电池续航、电池切换、供电装置及电子电路,属于电池充放电管理。
背景技术:
1、现有智能设备供电方式主要有两种:单个电池包供电和多个电池包并联,其中单个电池包供电的缺陷是容量大时,电池重量过重,不便携且不符合安规;多个电池包并联为电池组供电的缺陷是如果其中一个电池包不良,则导致整个电池组不良,电池组整体容量受状态最差的电池包限制,电池寿命受到较大影响。
技术实现思路
1、本申请通过提供一种多电池的充放电管理系统,对电池系统中并联的多个电池进行逐个调用的协调管理,提升控制效率,降低控制成本。
2、本申请实施例提供了一种多电池的充放电管理系统,其特征在于:包括多个单电池包、主机控制芯片u1以及与主机控制芯片u1控制端口连接的can通讯收发器u2;所述can通讯收发器u2的总线接口连接所有单电池包的总线接口;每个单电池包的控制芯片u3连接can通讯地址识别信号si端子。
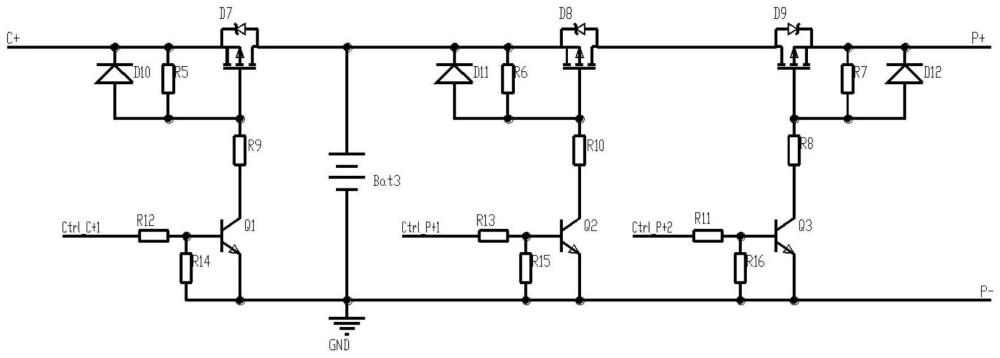
3、作为优选,所述单电池包的电路包括所述控制芯片u3、内部含有bms电池管理系统的电池电芯bat3,充电pmos管d7、放电pmos管d8、放电pmos管d9及can通讯收发器u4;所述can通讯收发器u4的总线接口一端与控制芯片u3控制端口连接,另一端与单电池包的总线接口连接;所述电池电芯bat3正极分别与充电pmos管d7的d极、放电pmos管d8的s极导线连接;所述放电pmos管d9的d极和放电pmos管d8的d极连接。
4、作为优选,所述充电pmos管d7的d极连接充电端口c+,二极管d10与电阻r5并联,正极连接充电pmos管d7的g极,负极连接充电端口c+;充电pmos管d7的g极连接电阻r9的第一引脚,r9第二引脚连接三极管q1的集电极,三极管q1的基极连接电阻r12的第一引脚,电阻r12的第二引脚ctrl c+1端连接电池包控制芯片u3的pa1端口;三极管q1的基极和发射极之间并联有电阻r14后接地;
5、放电pmos管d8的s极和g极之间并联有二极管d11和电阻r6,放电pmos管d8的g极连接电阻r10的第一引脚,r10第二引脚连接三极管q2的集电极,三极管q2的基极连接电阻r13的第一引脚,电阻r13的第二引脚ctrl p+1端连接电池包控制芯片u3的pa2端口;三极管q2的基极和发射极之间并联有电阻r15后接地;
6、所述放电pmos管d9的s极和g极之间并联有二极管d12和电阻r7,放电pmos管d9的g极连接电阻r8的第一引脚,r8第二引脚连接三极管q3的集电极,三极管q3的基极连接电阻r11的第一引脚,电阻r11的第二引脚ctrl p+2端连接电池包控制芯片u3的pa3端口;三极管q3的基极和发射极之间并联有电阻r16后接地。
7、作为优选,所述放电pmos管d9的s极连接电池组的放电端口p+,三极管q3的发射极连接负极端口p-,每个单电池包的充电端口c+相互连接,每个单电池包的放电端口p+相互连接,每个单电池包的负极端口p-也连接在一起;
8、放电时:p+和p-为电池组的放电端口,连接负载;
9、充电时:c+和p-为电池组的放电端口,需要充电时,连接充电器。
10、作为优选,每个单电池包的电池仓位中配置不同阻值的识别电阻。
11、本申请提供的技术方案至少具有如下技术效果:
12、1、每个电池是独立供电,个体不良不影响整机电池组。
13、2、电池组整体容量不受状态最差的电池包限制。
14、3、整机的电池仓配置不同id电阻来区分仓位,则保证了单个电池的一致性,简化控制电路,降低生产成本及提高生产效率。
技术特征:
1.一种多电池的充放电管理系统,其特征在于:包括多个单电池包、主机控制芯片u1以及与主机控制芯片u1控制端口连接的can通讯收发器u2;所述can通讯收发器u2的总线接口连接所有单电池包的总线接口;每个单电池包的控制芯片u3连接can通讯地址识别信号si端子。
2.根据权利要求1所述的多电池的充放电管理系统,其特征在于:所述单电池包的电路包括所述控制芯片u3、内部含有bms电池管理系统的电池电芯bat3,充电pmos管d7、放电pmos管d8、放电pmos管d9及can通讯收发器u4;所述can通讯收发器u4的总线接口一端与控制芯片u3控制端口连接,另一端与单电池包的总线接口连接;所述电池电芯bat3正极分别与充电pmos管d7的d极、放电pmos管d8的s极导线连接;所述放电pmos管d9的d极和放电pmos管d8的d极连接。
3.根据权利要求2所述的多电池的充放电管理系统,其特征在于:所述充电pmos管d7的d极连接充电端口c+,二极管d10与电阻r5并联,正极连接充电pmos管d7的g极,负极连接充电端口c+;充电pmos管d7的g极连接电阻r9的第一引脚,r9第二引脚连接三极管q1的集电极,三极管q1的基极连接电阻r12的第一引脚,电阻r12的第二引脚ctrl c+1端连接电池包控制芯片u3的pa1端口;三极管q1的基极和发射极之间并联有电阻r14后接地;
4.根据权利要求3所述的多电池的充放电管理系统,其特征在于:所述放电pmos管d9的s极连接电池组的放电端口p+,三极管q3的发射极连接负极端口p-,每个单电池包的充电端口c+相互连接,每个单电池包的放电端口p+相互连接,每个单电池包的负极端口p-也连接在一起;
5.根据权利要求1所述的多电池的充放电管理系统,其特征在于:每个单电池包的电池仓位中配置不同阻值的识别电阻。
技术总结
本技术提供一种多电池的充放电管理系统,包括多个单电池包、主机控制芯片U1以及与主机控制芯片U1控制端口连接的CAN通讯收发器U2;所述CAN通讯收发器U2的总线接口连接所有单电池包的总线接口;每个单电池包的控制芯片U3连接CAN通讯地址识别信号SI端子。本申请提供的技术方案的每个电池是独立供电,个体不良不影响整机电池组。电池组整体容量不受状态最差的电池包限制。整机的电池仓配置不同ID电阻来区分仓位,则保证了单个电池的一致性,简化控制电路,降低生产成本及提高生产效率。
技术研发人员:刘庆国,李光祥
受保护的技术使用者:南京腾亚机器人科技有限公司
技术研发日:20230630
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!