一种光伏面板表面清扫机器人的制作方法
本技术属于清扫机器人,特别是涉及一种光伏面板表面清扫机器人。
背景技术:
1、光伏发电作为新能源发电的重要组成,但在长期使用过程中,光伏板表面会积聚大量的灰尘、落叶等异物,这些异物附着在光伏板的表面会遮挡阳光,导致光伏板的发电效率降低,还可能造成光伏板产生热斑,降低光伏板的使用寿命,因此,光伏电站在运维过程中,保持光伏板表面的清洁十分重要。
2、如中国实用新型cn219025083u,公开了一种光伏板清扫机器人,包括机架、行走装置、清扫装置;行走装置包括安装板、第一驱动电机、第一电机轴、行走轮轴和行走轮,清扫装置包括清洁毛刷以及驱动所述清洁毛刷转动的驱动装置,驱动装置包括第二驱动电机、第二电机轴和毛刷轴。
3、上述的现有技术中,毛刷轴与安装板转动连接,使得现有技术中的毛刷辊无法进行位置调节,导致清扫机器人智能匹配一种直径尺寸的毛刷辊,整体的通用性和适应性较差。
4、并且,当毛刷辊最外侧刷毛有磨损,清扫效果下降时,只能通过更换新的毛刷辊来保证清扫效果,导致使用成本较高。
技术实现思路
1、本实用新型的目的在于提供一种光伏面板表面清扫机器人,通过调节滑块的位置,实现对清扫辊与光伏面板间距的调节,解决了现有清扫辊位置无法调节,通用性和适应性差的问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
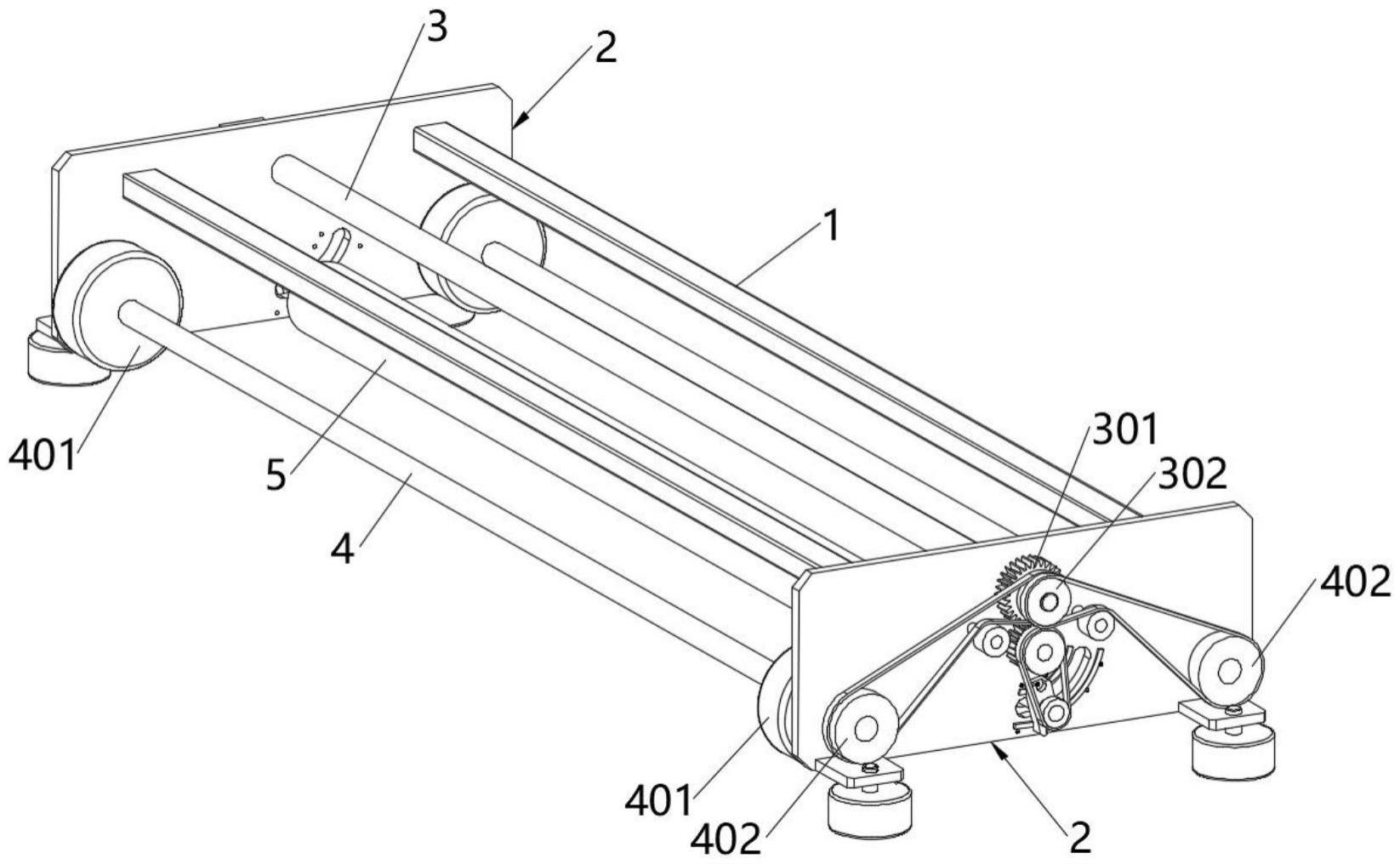
3、本实用新型为一种光伏面板表面清扫机器人,包括机架,以及连接于机架两端的行走机构,所述行走机构包括安装板,所述安装板转动连接有主动轴、从动轴和两行走轮轴;所述主动轴固定连接有主动齿轮和第一主动轮,以及传动连接有驱动装置;所述从动轴固定连接有第二主动轮,以及与主动齿轮啮合的从动齿轮;两所述行走轮轴均连接有行走轮和第一从动轮,且两第一从动轮均与第一主动轮传动连接;两所述安装板均开设有与从动轴同心设置的弧形槽口,以及沿弧形槽口边沿分布的连接孔,且安装板滑动连接有滑块;所述滑块的滑动方向与弧形槽口平行设置,且滑块开设有通孔,用于使通孔与连接孔对应,并通过螺栓连接,实现对滑块的位置固定;两所述滑块均转动连接有与弧形槽口间隙配合的传动轴,并通过两传动轴连接有清扫辊;所述传动轴一端连接有传动轮,且传动轮与第二主动轮传动连接。
4、作为本实用新型的一种优选技术方案,所述弧形槽口的最下端位于从动轴的正下方。
5、作为本实用新型的一种优选技术方案,两所述安装板转动连接的主动轴为一体式结构,且主动齿轮和第一主动轮位于主动轴的一端,驱动装置与主动轴的另一端传动连接。
6、作为本实用新型的一种优选技术方案,两所述安装板转动连接的行走轮轴为一体式结构,使得同一行走轮轴同时与两安装板转动连接。
7、作为本实用新型的一种优选技术方案,所述主动齿轮与从动齿轮的传动比小于1。
8、作为本实用新型的一种优选技术方案,所述第二主动轮与传动轮的传动比小于1。
9、作为本实用新型的一种优选技术方案,所述第一主动轮为双排链轮或双排同步带轮。
10、本实用新型具有以下有益效果:
11、本实用新型通过两侧的安装板滑动连接滑块,滑块可围绕从动轴进行位置调节,使得传动轮与第二主动轮保持传动连接,滑块位置调节,实现对清扫辊与光伏面板表面的间距得到调节,从而便于适应对不同直径的清扫辊进行安装,从而保证清扫辊对光伏面板的最佳清扫效果,使得清扫机器人的通用性和适应性得到有效的提高。
12、同时,在清扫辊磨损清扫效果下降时,可通过调节滑块,使得清扫辊与光伏面板的间距减小,从而保证清扫效果,使得清扫辊的利用率得到大大的提高,减少清扫辊的更换频率,有利于降低整体的生产成本。
13、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种光伏面板表面清扫机器人,包括机架(1),以及连接于机架(1)两端的行走机构(2),所述行走机构(2)包括安装板(201),其特征在于:
2.根据权利要求1所述的一种光伏面板表面清扫机器人,其特征在于,所述弧形槽口(202)的最下端位于从动轴的正下方。
3.根据权利要求1所述的一种光伏面板表面清扫机器人,其特征在于,两所述安装板(201)转动连接的主动轴(3)为一体式结构,且主动齿轮(301)和第一主动轮(302)位于主动轴(3)的一端,驱动装置(303)与主动轴(3)的另一端传动连接。
4.根据权利要求1或3所述的一种光伏面板表面清扫机器人,其特征在于,两所述安装板(201)转动连接的行走轮轴(4)为一体式结构,使得同一行走轮轴(4)同时与两安装板(201)转动连接。
5.根据权利要求1所述的一种光伏面板表面清扫机器人,其特征在于,所述主动齿轮(301)与从动齿轮(502)的传动比小于1。
6.根据权利要求1或5所述的一种光伏面板表面清扫机器人,其特征在于,所述第二主动轮(501)与传动轮(506)的传动比小于1。
7.根据权利要求1所述的一种光伏面板表面清扫机器人,其特征在于,所述第一主动轮(302)为双排链轮或双排同步带轮。
技术总结
本技术公开了一种光伏面板表面清扫机器人,涉及清扫机器人技术领域。本技术包括安装板,安装板转动连接有主动轴、从动轴和两行走轮轴;主动轴连接有主动齿轮和第一主动轮;从动轴连接有第二主动轮,以及与主动齿轮啮合的从动齿轮;两行走轮轴均连接有行走轮,和与第一主动轮传动连接的第一从动轮;两安装板均开设有与从动轴同心设置的弧形槽口,以及滑动连接有滑块,滑块的滑动方向与弧形槽口平行设置,两滑块均转动连接有传动轴,并通过两传动轴连接有清扫辊;传动轴连接有与第二主动轮传动连接的传动轮。本技术通过调节滑块的位置,实现对清扫辊与光伏面板间距的调节,解决了现有清扫辊位置无法调节,通用性和适应性差的问题。
技术研发人员:赵炳成,许瑞,练德强,洪达,陈成,施凌震,应昊翰,霍凯龙,夏许忠,戴航天,沈晓良,严建伟,张海波,王杰,孙健琦,童泽琪,金强
受保护的技术使用者:浙江中新电力工程建设有限公司
技术研发日:20230705
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!