轨道巡检机器人的供电系统及轨道巡检机器人的制作方法
本申请涉及轨道巡检设备技术,尤其涉及一种轨道巡检机器人的供电系统及轨道巡检机器人。
背景技术:
1、近年来,国内城市轨道交通线路数量快速增长,运营里程总数已达上万公里,每条线路上的轨道、道岔等关键设备需要定期进行监测和健康管理。随着智能技术的不断进步,轨道巡检机器人取代了人工巡检,实现自动对线路设备进行巡检。
2、轨道巡检机器人通常由蓄电池供电,其续航能力由蓄电池的容量决定。而在我国轨道线路逐渐增多、空窗期逐渐缩短的情况下,轨道巡检机器人需要具备更高的续航能力及可靠性。目前,提高续航能力的方式是扩大蓄电池的容量,但电池容量扩大带来的问题是电池重量增大,提高了搬运难度,影响了机器人的安装和运输。另外,一旦蓄电池在巡检过程中发生故障将会使机器人发生瘫痪,进而导致采集的数据丢失,使其可靠性不能满足要求。
技术实现思路
1、为了解决上述技术缺陷之一,本申请实施例中提供了一种轨道巡检机器人的供电系统及轨道巡检机器人。
2、根据本申请实施例的第一个方面,提供了一种轨道巡检机器人的供电系统,包括:
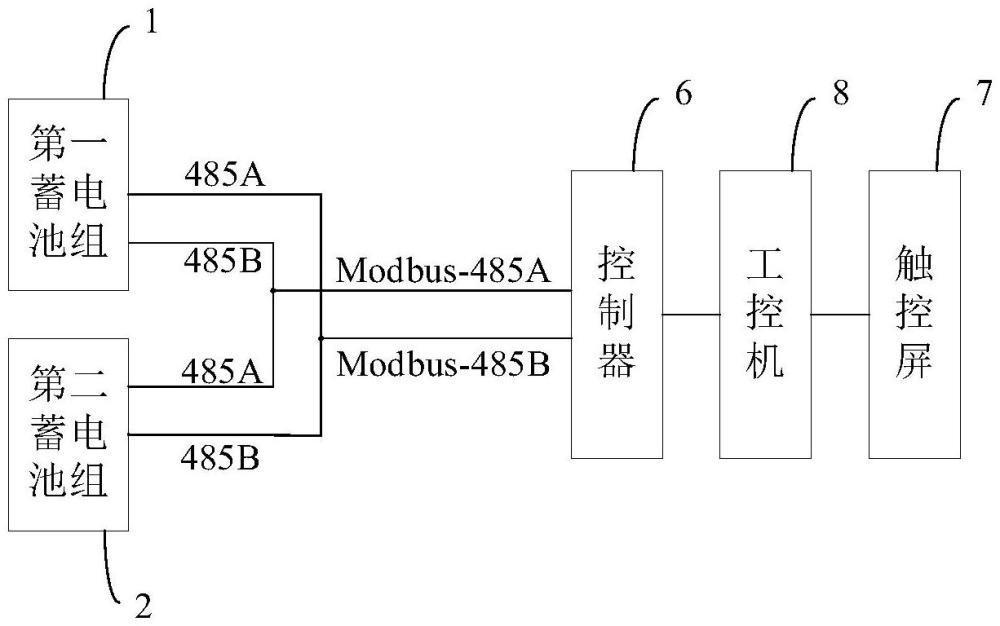
3、两个蓄电池组,每个蓄电池组包括单体电池及电池管理系统bms,单体电池用于与轨道巡检机器人中的用电负载相连;两个蓄电池组中单体电池的输出端并联;电池管理系统bms与对应的单体电池相连;
4、数据采集模块,与两个蓄电池组中的电池管理系统bms的输出端相连,用于采集电池管理系统bms的输出数据;
5、控制器,与数据采集模块相连;
6、触控屏,与控制器相连。
7、根据本申请实施例的第二个方面,提供了一种轨道巡检机器人,包括:
8、主机架;
9、走行系统,设置于所述主机架底部;
10、巡检作业装置,设置于所述主机架上,用于执行轨道巡检作业;
11、如上所述的供电系统,设置于主机架上用于向巡检作业装置供电。
12、本申请实施例所提供的技术方案采用两个蓄电池组,每个蓄电池组包括单体电池及bms,单体电池用于与轨道巡检机器人中的用电负载相连;两个蓄电池组中单体电池的输出端并联;bms与对应的单体电池相连;数据采集模块与两个蓄电池组中的bms的输出端相连,用于采集bms的输出数据;控制器与数据采集模块相连;触控屏与控制器相连,实现了对轨道巡检机器人进行供电及电量监控,采用两个蓄电池组能够增大机器人的续航能力,并且单个蓄电池组的体积和重量较小,易于搬运和运输。而且一个蓄电池组发生故障的情况下,另一个蓄电池组进行供电,能降低采集数据发生丢失的几率,提高机器人的可靠性。
技术特征:
1.一种轨道巡检机器人的供电系统,其特征在于,包括:
2.根据权利要求1所述的轨道巡检机器人的供电系统,其特征在于,每个蓄电池组中单体电池的输出端连接有单向限流模块。
3.根据权利要求1所述的轨道巡检机器人的供电系统,其特征在于,还包括:超级电容,用于与数据采集模块和控制器相连。
4.根据权利要求1-3任一项所述的轨道巡检机器人的供电系统,其特征在于,所述数据采集模块为串行485总线模块。
5.根据权利要求4所述的轨道巡检机器人的供电系统,其特征在于,数据采集模块的输出端为modbus协议通信接口,以与控制器之间通过modbus协议传输数据。
6.根据权利要求1-3任一项所述的轨道巡检机器人的供电系统,其特征在于,所述控制器为可编程逻辑控制器plc,数据采集模块与plc中的通信模块相连。
7.一种轨道巡检机器人,其特征在于,包括:
8.根据权利要求7所述的轨道巡检机器人,其特征在于,所述供电系统设置于主机架的上表面;所述主机架上还设有散热系统,设置于供电系统的旁侧,用于对供电系统进行散热。
9.根据权利要求7所述的轨道巡检机器人,其特征在于,所述主机架上设有两个独立的电池安装部,一个蓄电池组装配于一个电池安装部。
10.根据权利要求8所述的轨道巡检机器人,其特征在于,所述主机架上设有电源连接座,所述电源连接座设有若干连接端子,分别与两个蓄电池组中的单体电池相连。
技术总结
本申请实施例提供一种轨道巡检机器人的供电系统及轨道巡检机器人,其中,供电系统包括:两个蓄电池组,每个蓄电池组包括单体电池及电池管理系统BMS,单体电池用于与轨道巡检机器人中的用电负载相连;两个蓄电池组中单体电池的输出端并联;电池管理系统BMS与对应的单体电池相连;数据采集模块,与两个蓄电池组中的电池管理系统BMS的输出端相连,用于采集电池管理系统BMS的输出数据;控制器,与数据采集模块相连;触控屏,与控制器相连。本申请实施例提供的轨道巡检机器人的供电系统及轨道巡检机器人能够延长续航能力,且提高可靠性。
技术研发人员:边帅,姜汉超,马龙庆,赵勇
受保护的技术使用者:北京格灵深瞳信息技术股份有限公司
技术研发日:20230707
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!