一种用于光伏清扫机器人工作的定位机构的制作方法
本技术涉及光伏清扫机器人,具体为一种用于光伏清扫机器人工作的定位机构。
背景技术:
1、光伏发电系统简称光伏,是指利用光伏电池的光生伏特效应,将太阳辐射能直接转换成电能的发电系统,即光伏发电系统,是利用半导体材料的光伏效应,将太阳辐射能转化为电能的一种。
2、光伏系统需要暴露在室外进行使用,为了减少外部灰尘对光伏光照采集造成的影响,所以需要定期通过清扫机器人对光伏板进行擦拭,但是现有清扫机器人与光伏板的连接方式较为繁琐,需要通过螺纹组件进行固接,费时费力,无法满足大规模光伏系统的清扫需求。
3、因此,需要对用于光伏清扫机器人工作的定位机构进行设计改造。
技术实现思路
1、为解决上述背景技术中提出的问题,本实用新型的目的在于提供一种用于光伏清扫机器人工作的定位机构,具备便于安装定位的优点,解决了现有清扫机器人与光伏板的连接方式较为繁琐,需要通过螺纹组件进行固接,费时费力,无法满足大规模光伏系统的清扫需求的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种用于光伏清扫机器人工作的定位机构,包括光伏板;
3、设置在光伏板顶部的机器人;
4、所述机器人顶部的左侧与右侧均固定连接有连接块,所述连接块的表面通过销轴活动连接有卡爪,所述卡爪远离连接块的一侧延伸至机器人的底部,所述卡爪的内侧固定连接有位于机器人顶部的传动板,所述机器人的顶部通过轴承活动连接有螺杆,所述螺杆的顶端固定连接有扭块,所述螺杆的表面螺纹连接有螺套,所述螺套的正面固定连接有位于传动板底部的推杆。
5、作为本实用新型优选的,所述光伏板的顶部固定连接有防护罩,所述防护罩套设在螺杆的表面,所述螺套、连接块和传动板均位于防护罩的内部。
6、作为本实用新型优选的,所述螺套的表面开设有限位槽,所述防护罩的内部固定连接有位于限位槽内部的限位杆,所述限位杆和限位槽滑动连接。
7、作为本实用新型优选的,所述推杆的表面套设有套管,所述套管的外表面与传动板的表面接触。
8、作为本实用新型优选的,所述卡爪的外侧通过销轴活动连接有滚轮,所述滚轮贯穿卡爪并延伸至卡爪的内侧,所述滚轮的外表面与光伏板的表面接触。
9、作为本实用新型优选的,所述螺杆的表面螺纹连接有位于防护罩顶部的定位块,所述定位块的底部与防护罩的顶部接触。
10、与现有技术相比,本实用新型的有益效果如下:
11、1、本实用新型能够改进现有清扫机器人与光伏板的连接方式,替代通过螺纹组件进行固接的操作方式,省时省力,满足大规模光伏系统的清扫需求。
12、2、本实用新型通过设置防护罩,能够提高机器人的安全性,减少传动结构与外部环境的接触面积,同时可以对螺杆进行有效支撑。
技术特征:
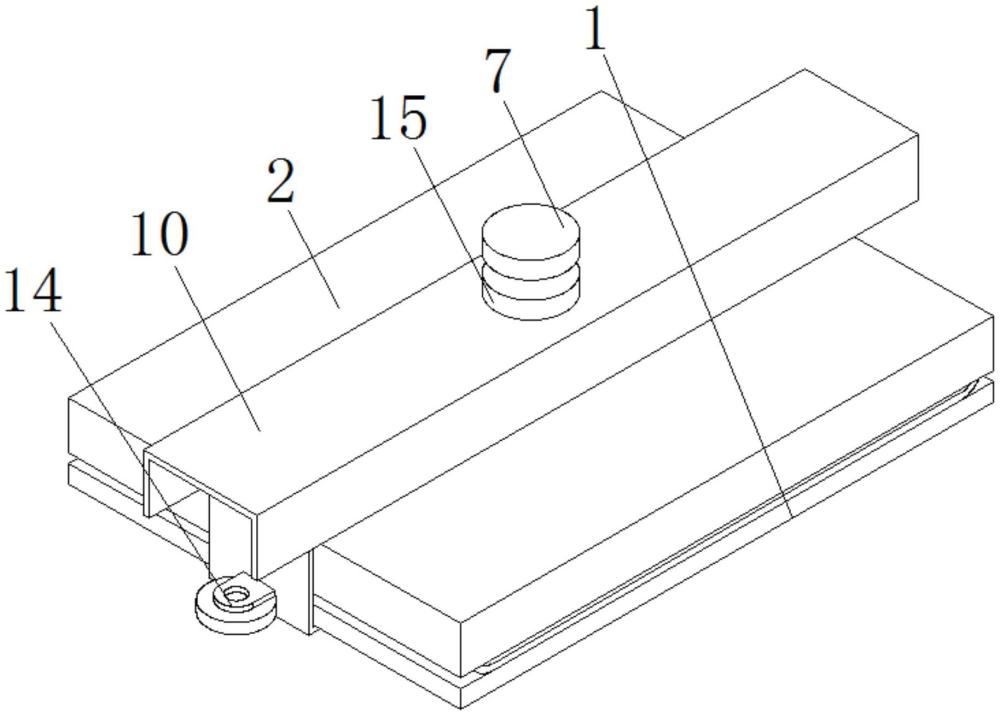
1.一种用于光伏清扫机器人工作的定位机构,包括光伏板(1);
2.根据权利要求1所述的一种用于光伏清扫机器人工作的定位机构,其特征在于:所述光伏板(1)的顶部固定连接有防护罩(10),所述防护罩(10)套设在螺杆(6)的表面,所述螺套(8)、连接块(3)和传动板(5)均位于防护罩(10)的内部。
3.根据权利要求2所述的一种用于光伏清扫机器人工作的定位机构,其特征在于:所述螺套(8)的表面开设有限位槽(11),所述防护罩(10)的内部固定连接有位于限位槽(11)内部的限位杆(12),所述限位杆(12)和限位槽(11)滑动连接。
4.根据权利要求1所述的一种用于光伏清扫机器人工作的定位机构,其特征在于:所述推杆(9)的表面套设有套管(13),所述套管(13)的外表面与传动板(5)的表面接触。
5.根据权利要求1所述的一种用于光伏清扫机器人工作的定位机构,其特征在于:所述卡爪(4)的外侧通过销轴活动连接有滚轮(14),所述滚轮(14)贯穿卡爪(4)并延伸至卡爪(4)的内侧,所述滚轮(14)的外表面与光伏板(1)的表面接触。
6.根据权利要求2所述的一种用于光伏清扫机器人工作的定位机构,其特征在于:所述螺杆(6)的表面螺纹连接有位于防护罩(10)顶部的定位块(15),所述定位块(15)的底部与防护罩(10)的顶部接触。
技术总结
本技术公开了一种用于光伏清扫机器人工作的定位机构,包括光伏板,设置在光伏板顶部的机器人,所述机器人顶部的左侧与右侧均固定连接有连接块,所述连接块的表面通过销轴活动连接有卡爪,所述卡爪远离连接块的一侧延伸至机器人的底部,所述卡爪的内侧固定连接有位于机器人顶部的传动板,所述机器人的顶部通过轴承活动连接有螺杆,所述螺杆的顶端固定连接有扭块,所述螺杆的表面螺纹连接有螺套,所述螺套的正面固定连接有位于传动板底部的推杆,所述光伏板的顶部固定连接有防护罩。本技术能够改进现有清扫机器人与光伏板的连接方式,替代通过螺纹组件进行固接的操作方式,省时省力,满足大规模光伏系统的清扫需求。
技术研发人员:辛亮,胡泽亚,邵龙威,安达,宋东东,刘海东,孟令佳,孙健,刘贵鑫
受保护的技术使用者:水发能源集团有限公司
技术研发日:20230802
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!