一种电机组装夹爪的制作方法
本技术属于机械臂,涉及一种电机组装夹爪。
背景技术:
1、电机组装过程中需要在转子与电机壳之间设置密封圈,因此也需要使用夹爪夹取电机壳以及使用夹爪夹取密封圈放置入电机壳内。
2、授权公告号为cn214025753u的专利公开一种多功能齿轮抓手及其齿轮加工机械臂,其中该多功能齿轮抓手包括:基座,第一夹爪单元,第二夹爪单元,第三夹爪单元,其中所述基座成三角体形状,所述第一夹爪单元、第二夹爪单元、第三夹爪单元分别布设在所述基座的第一至第三面上,所述基座背部还设有与机械臂对接的接口件,其中所述第一夹爪单元包括:第一连接台,支架件,第一夹爪件,其中所述支架件呈叉状,所述第一夹爪件分设在所述支架件的第一及第二位置处,以在所述支架件中部定义出容齿区,所述支架件的第三位置处与所述第一连接台底部连接,所述第一连接台的顶部与所述基座的第一面连接。
3、上述方案中可设置不同夹爪夹取电机部件进行组装,但在夹取电机壳并将密封圈置于电机壳内的步骤仍较为繁琐,效率不足。
技术实现思路
1、本实用新型针对现有的技术存在的上述问题,提供一种电机组装夹爪,本实用新型所要解决的技术问题是:电机组装效率不足。
2、本实用新型的目的可通过下列技术方案来实现:
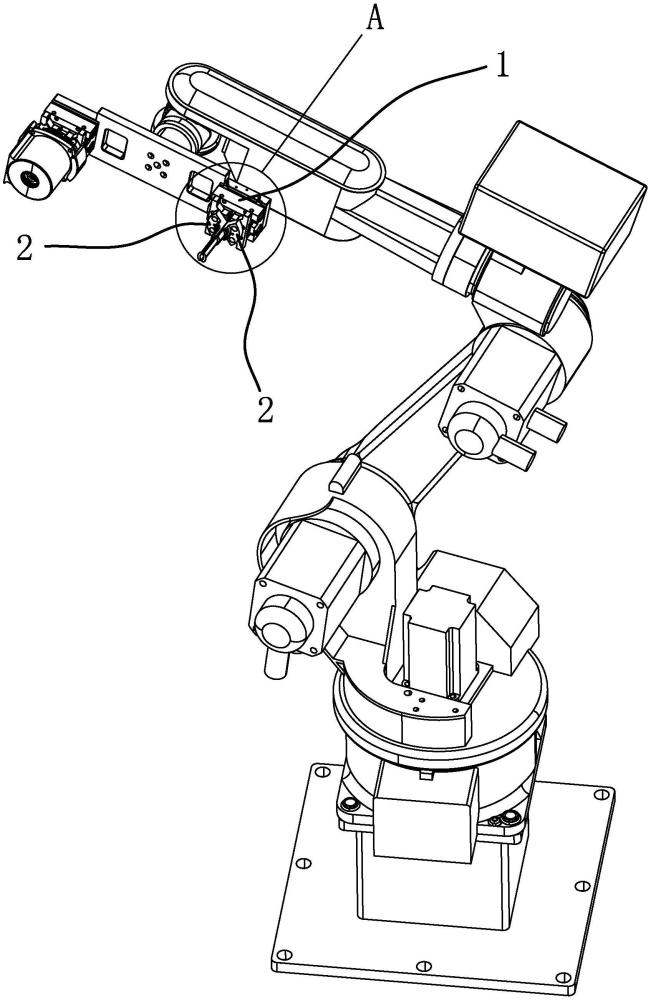
3、一种电机组装夹爪,包括夹座和两滑动连接于所述夹座上且可相向靠拢和背离的卡爪,其特征在于,所述卡爪上均具有朝远离所述夹座一侧设置的撑杆,两所述撑杆外端的间距尺寸小于两所述卡爪相背一侧的最大间距尺寸。
4、夹座可与单臂机器人相连,卡爪连接于夹座上可相向运动实现对电机部件的定位,再由单臂机器人动作带动电机部件运动,两卡爪可伸出电机壳内再相背运动是两卡爪分别与电机壳的内壁顶紧,这样即可实现对电机壳的定位撑取;通过在夹爪上设置朝远离夹座一侧布置的撑杆,使两撑杆外端的间距尺寸小于两卡爪相背一侧的最大间距尺寸,这样夹爪靠近时可带动两撑杆靠近用于撑取密封圈部件,再带动密封圈整个伸入电机壳内再次相背运动撑取整个电机壳,此时密封圈仍保持在电机壳内的指定位置,最后夹爪靠拢带动撑杆也靠拢可使电机壳和密封圈均脱离而自行落位,即该夹爪结构将夹取电机壳放置和再由不同夹爪夹取密封圈放置的两个放置动作壳简化为一个放置动作,提升组装效率。
5、在上述电机组装夹爪中,所述撑杆的外端具有朝远离另一撑杆方向凸出的限位部。这样再撑杆撑取密封圈时不必完全撑紧即可使密封圈挂在限位部上而不脱落,避免二次相背运动撑取电机壳时使密封圈过度变形,保障密封圈形状和性能稳定。
6、在上述电机组装夹爪中,两卡爪相背一侧的侧面具有圆弧状的顶撑面,两所述卡爪能背离运动使两所述顶撑面位于同一圆周内。这样利于增加卡爪与电机壳内壁的贴合定位效果,避免撑取作用力较大时电机壳内壁受损。
7、在上述电机组装夹爪中,两所述撑杆相背一侧的侧面均呈圆弧面状,两所述顶撑面位于同一圆周内时两所述撑杆相背一侧的侧面也位于另一同心的圆周内。密封圈用于实现转子轴与电机壳之间的密封,这样保障密封圈与电机壳内壁同心放置,使组装精准可靠。
8、在上述电机组装夹爪中,两所述卡爪和撑杆始终绕中心对称布置。这样利于保障电机壳和密封圈撑取时两侧的受力均匀稳定,进而使其组装稳定精准。
9、在上述电机组装夹爪中,所述限位部朝向所述夹座的一侧经圆角过渡处理。这样利于提升撑取时对密封圈的定位效果,同时避免锐利棱边对密封圈造成损伤。
10、与现有技术相比,本实用新型的优点如下:
11、本电机组装夹爪利用自身结构特点在撑取密封圈后,在撑取电机壳同时将密封圈放至指定位置,节约了组装步骤的路径,利于提升组装效率。
技术特征:
1.一种电机组装夹爪,包括夹座(1)和两滑动连接于所述夹座(1)上且可相向靠拢和背离的卡爪(2),其特征在于,所述卡爪(2)上均具有朝远离所述夹座(1)一侧设置的撑杆(22),两所述撑杆(22)外端的间距尺寸小于两所述卡爪(2)相背一侧的最大间距尺寸。
2.根据权利要求1所述的电机组装夹爪,其特征在于,所述撑杆(22)的外端具有朝远离另一撑杆(22)方向凸出的限位部(221)。
3.根据权利要求1或2所述的电机组装夹爪,其特征在于,两卡爪(2)相背一侧的侧面具有圆弧状的顶撑面(21),两所述卡爪(2)能背离运动使两所述顶撑面(21)位于同一圆周内。
4.根据权利要求3所述的电机组装夹爪,其特征在于,两所述撑杆(22)相背一侧的侧面均呈圆弧面状,两所述顶撑面(21)位于同一圆周内时两所述撑杆(22)相背一侧的侧面也位于另一同心的圆周内。
5.根据权利要求1或2所述的电机组装夹爪,其特征在于,两所述卡爪(2)和撑杆(22)始终绕中心对称布置。
6.根据权利要求2所述的电机组装夹爪,其特征在于,所述限位部(221)朝向所述夹座(1)的一侧经圆角过渡处理。
技术总结
本技术提供了一种电机组装夹爪,属于机械臂技术领域。它解决了现有组装夹爪对电机组装效率不足的技术问题。本电机组装夹爪,包括夹座和两滑动连接于所述夹座上且可相向靠拢和背离的卡爪,其特征在于,所述卡爪上均具有朝远离所述夹座一侧设置的撑杆,两所述撑杆外端的间距尺寸小于两所述卡爪相背一侧的最大间距尺寸。本电机组装夹爪利于提升电机的组装效率。
技术研发人员:陈斌
受保护的技术使用者:浙江威格智能泵业股份有限公司
技术研发日:20230807
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!