一种用于检测光伏组件的感知定位装置的制作方法
本技术涉及一种用于检测光伏组件的感知定位装置。
背景技术:
1、太阳能光伏作为一种可再生清洁能源,已成为当今全球能源变革的重要力量。太阳能电池板表面容易积累风沙、灰尘等污垢,若没有及时科学专业的清洁和监测等维护作业,最高可导致组件发电功率衰减40%-60%,发电量下降20%-30%。因此,通过合理科学地清洁和维护太阳能电池板以及对组件的悉心养护来提升电站发电量和效益的理念,受到业界认可。
2、光伏清洁机器人自主工作的时候,需要依靠检测装置来判断所处位置。目前市面上主要需依靠在光伏阵列添加特定的感应装置或固定装置进行定位,维持机器在光伏阵列上的行走、清洁或监测等作业。这样的添加特定感应装置或固定装置的感应方式,不仅增加了设备成本,而且容易受光伏阵列的大小和形状的限制导致无法安装附加装置。部分依靠光伏边框进行定位,但边框的束缚导致光伏清洁机器人运行速度大幅度降低,且受阵列分布影响,无法准确规划出最优作业路径,严重影响作业效率和经济效益。
技术实现思路
1、鉴于现有技术中存在的上述问题,本实用新型的主要目的在于提供一种结构简单、使用方便且安全可靠的用于检测光伏组件的感知定位装置。
2、本实用新型的技术方案是这样的:
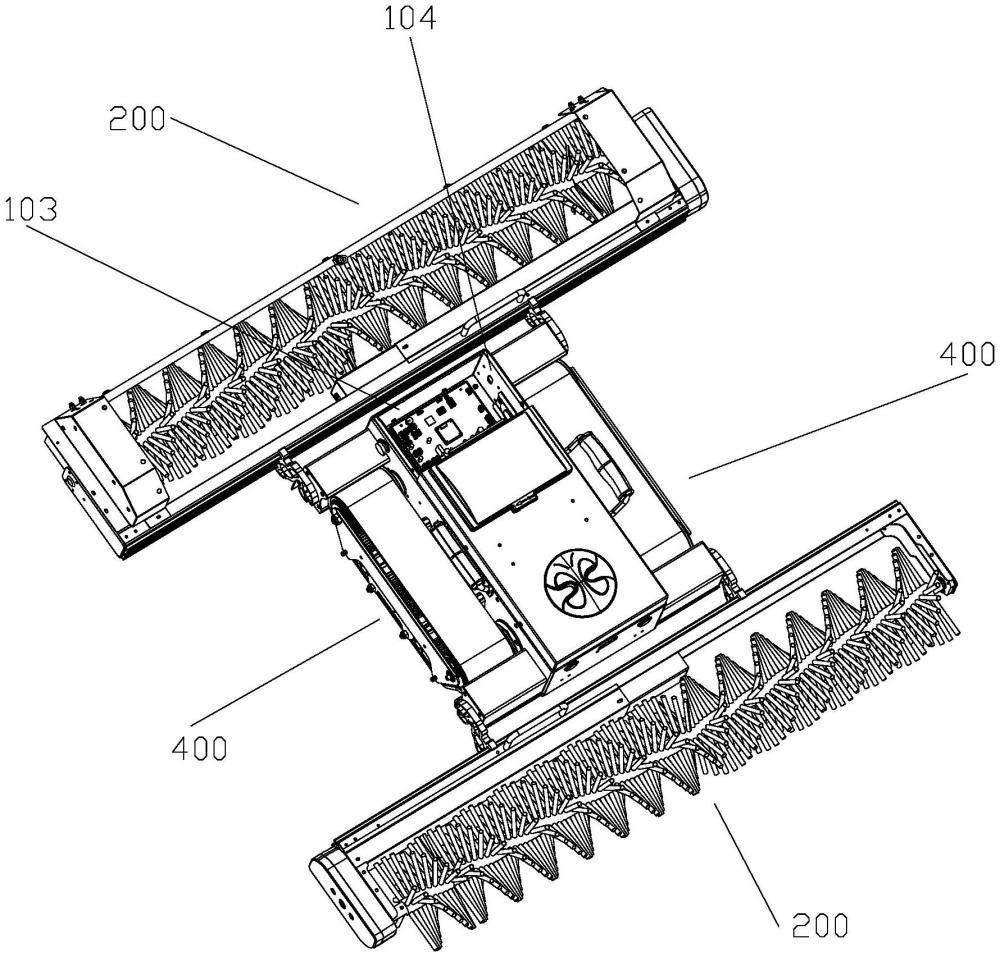
3、一种用于检测光伏组件的感知定位装置,所述用于检测光伏组件的感知定位装置安装在光伏清洁机器人的前端,所述光伏清洁机器人包括机身,所述机身的前端和后端分别设置有清洁组件,且所述机身的两侧分别设置有履带驱动组件,所述光伏清洁机器人在所述履带驱动组件的驱动下进行行驶,并通过所述清洁组件对光伏组件进行清扫作业,所述用于检测光伏组件的感知定位装置安装所述机身的前端,用于感知所述机身底部所处光伏组件的表面图像,所述用于检测光伏组件的感知定位装置包括壳体,所述壳体的上端内凹形成有安装凹部,所述壳体的下端设置有开口,所述开口与所述壳体的空腔相连通,所述安装凹部内设置有主控驱动模块和摄像头模块,所述主控驱动模块包括主控驱动板,所述主控驱动板通过多个固定柱设置在所述安装凹部内,所述主控驱动板上设置有定位通孔,所述安装凹部的底部向上延伸设置有固定凸部,所述固定凸部内凹形成固定凹槽,所述固定凹槽的底部设置有连接通孔,所述连接通孔与所述壳体内的空腔相连通,所述摄像头模块包括摄像头、摄像头驱动板以及玻璃镜片,所述玻璃镜片固定设置在所述连接通孔中,所述摄像头固定设置在所述摄像头驱动板的下表面且位于所述固定凹槽中,所述摄像头驱动板固定设置在所述固定凸部的顶端,所述主控驱动板的下表面设置有多个补光灯。
4、所述机身包括底盘以及设置在底盘上的连接框架,所述连接框架的左侧和右侧分别设置有履带驱动组件。
5、所述连接框架包括第一连接板、第二连接板、第三连接板以及第四连接板,其中,所述第一连接板固定设置在所述底盘左侧的上表面,所述第二连接板固定设置在所述底盘前侧的上表面,所述第三连接板固定设置在所述底盘右侧的上表面,所述第四连接板固定设置在所述底盘后侧的上表面。
6、所述底盘的前部设置有安装孔,所述壳体安装在所述连接框架内部并通过紧固螺钉固定设置在所述底盘上的所述安装孔中。
7、所述壳体的形状为方形,所述底盘的底部位于所述壳体的外部四周分别设置有第一遮光刷、第二遮光刷、第三遮光刷以及第四遮光刷。
8、所述第一遮光刷位于所述壳体底部的左侧,且所述第一遮光刷的顶部固定设置在所述底盘的底部且位于所述安装孔的左侧;
9、所述第二遮光刷位于所述壳体底部的前侧,且所述第二遮光刷的顶部固定设置在所述底盘的底部且位于所述安装孔的前侧;
10、所述第三遮光刷位于所述壳体底部的右侧,且所述第三遮光刷的顶部固定设置在所述底盘的底部且位于所述安装孔的右侧;
11、所述第四遮光刷位于所述壳体底部的后侧,且所述第四遮光刷的顶部固定设置在所述底盘的底部且位于所述安装孔的后侧。
12、所述固定凸部上位于所述固定凹槽的底部四角分别设置有一安装柱,所述安装柱顶部设置有安装孔,所述摄像头驱动板通过紧固螺丝与所述安装柱的配合与所述固定凸部紧固连接。
13、所述补光灯的数量为四个,四个所述补光灯分别设置在所述主控驱动板的四角下方,且所述补光灯的下端贯穿所述安装凹部底部上的限位孔后向下延伸至所述壳体的空腔内部。
14、所述壳体的外侧壁下部的左侧底部向外延伸设置有第一连接部,所述壳体的外侧壁下部的前侧底部向外延伸设置有第二连接部,所述壳体的外侧壁下部的右侧底部向外延伸设置有第三连接部,所述壳体的外侧壁下部的前侧底部向外延伸设置有第四连接部,且所述第一连接部、第二连接部、第三连接部以及第四连接部首尾依次连接形成一个限位部,所述壳体通过所述限位部设置在所述安装孔中。
15、所述第二连接部向外延伸设置有多个第一安装凸部,且所述第一安装凸部上设置有第一安装孔;
16、所述第四连接部向外延伸设置有多个第二安装凸部,且所述第二安装凸部上设置有第二安装孔;当所述壳体安装在所述底盘上的安装孔中时,所述壳体通过所述限位部支撑设置在所述安装孔周边的底盘上,并通过所述第一安装凸部和第二安装凸部与所述底盘固定连接。
17、本实用新型具有以下优点和有益效果:本实用新型实施例提供的用于检测光伏组件的感知定位装置,可提高光伏清洁机器人的自动化程度,简化光伏清洁机器人的感知组件的结构,并且提高光伏清洁机器人的适用性和可开发性,以达到光伏清洁机器人感知光伏板表面的特征,为光伏清洁机器人自动进行清洁作业提供可靠依据进行决策和规划,并根据指令驱动不同的外置装置完成指定作业任务,节约人力和降低电站维护成本。
技术特征:
1.一种用于检测光伏组件的感知定位装置,所述用于检测光伏组件的感知定位装置安装在光伏清洁机器人的前端,所述光伏清洁机器人包括机身,所述机身的前端和后端分别设置有清洁组件,且所述机身的两侧分别设置有履带驱动组件,所述光伏清洁机器人在所述履带驱动组件的驱动下进行行驶,并通过所述清洁组件对光伏组件进行清扫作业,其特征在于:所述用于检测光伏组件的感知定位装置安装所述机身的前端,用于感知所述机身底部所处光伏组件的表面图像,所述用于检测光伏组件的感知定位装置包括壳体,所述壳体的上端内凹形成有安装凹部,所述壳体的下端设置有开口,所述开口与所述壳体的空腔相连通,所述安装凹部内设置有主控驱动模块和摄像头模块,所述主控驱动模块包括主控驱动板,所述主控驱动板通过多个固定柱设置在所述安装凹部内,所述主控驱动板上设置有定位通孔,所述安装凹部的底部向上延伸设置有固定凸部,所述固定凸部内凹形成固定凹槽,所述固定凹槽的底部设置有连接通孔,所述连接通孔与所述壳体内的空腔相连通,所述摄像头模块包括摄像头、摄像头驱动板以及玻璃镜片,所述玻璃镜片固定设置在所述连接通孔中,所述摄像头固定设置在所述摄像头驱动板的下表面且位于所述固定凹槽中,所述摄像头驱动板固定设置在所述固定凸部的顶端,所述主控驱动板的下表面设置有多个补光灯。
2.根据权利要求1所述的用于检测光伏组件的感知定位装置,其特征在于,所述机身包括底盘以及设置在底盘上的连接框架,所述连接框架的左侧和右侧分别设置有履带驱动组件。
3.根据权利要求2所述的用于检测光伏组件的感知定位装置,其特征在于,所述连接框架包括第一连接板、第二连接板、第三连接板以及第四连接板,其中,所述第一连接板固定设置在所述底盘左侧的上表面,所述第二连接板固定设置在所述底盘前侧的上表面,所述第三连接板固定设置在所述底盘右侧的上表面,所述第四连接板固定设置在所述底盘后侧的上表面。
4.根据权利要求2所述的用于检测光伏组件的感知定位装置,其特征在于,所述底盘的前部设置有安装孔,所述壳体安装在所述连接框架内部并通过紧固螺钉固定设置在所述底盘上的所述安装孔中。
5.根据权利要求4所述的用于检测光伏组件的感知定位装置,其特征在于,所述壳体的形状为方形,所述底盘的底部位于所述壳体的外部四周分别设置有第一遮光刷、第二遮光刷、第三遮光刷以及第四遮光刷。
6.根据权利要求5所述的用于检测光伏组件的感知定位装置,其特征在于,所述第一遮光刷位于所述壳体底部的左侧,且所述第一遮光刷的顶部固定设置在所述底盘的底部且位于所述安装孔的左侧;
7.根据权利要求1所述的用于检测光伏组件的感知定位装置,其特征在于,所述固定凸部上位于所述固定凹槽的底部四角分别设置有一安装柱,所述安装柱顶部设置有安装孔,所述摄像头驱动板通过紧固螺丝与所述安装柱的配合与所述固定凸部紧固连接。
8.根据权利要求1所述的用于检测光伏组件的感知定位装置,其特征在于,所述补光灯的数量为四个,四个所述补光灯分别设置在所述主控驱动板的四角下方,且所述补光灯的下端贯穿所述安装凹部底部上的限位孔后向下延伸至所述壳体的空腔内部。
9.根据权利要求5所述的用于检测光伏组件的感知定位装置,其特征在于,所述壳体的外侧壁下部的左侧底部向外延伸设置有第一连接部,所述壳体的外侧壁下部的前侧底部向外延伸设置有第二连接部,所述壳体的外侧壁下部的右侧底部向外延伸设置有第三连接部,所述壳体的外侧壁下部的前侧底部向外延伸设置有第四连接部,且所述第一连接部、第二连接部、第三连接部以及第四连接部首尾依次连接形成一个限位部,所述壳体通过所述限位部设置在所述安装孔中。
10.根据权利要求9所述的用于检测光伏组件的感知定位装置,其特征在于,所述第二连接部向外延伸设置有多个第一安装凸部,且所述第一安装凸部上设置有第一安装孔;
技术总结
本技术涉及一种用于检测光伏组件的感知定位装置,安装在光伏清洁机器人的前端,光伏清洁机器人包括机身,机身的前端和后端分别设置有清洁组件,机身的两侧分别设置有履带驱动组件,光伏清洁机器人在履带驱动组件的驱动下进行行驶,并通过所述清洁组件对光伏组件进行清扫作业;用于检测光伏组件的感知定位装置安装所述机身的前端,用于感知机身底部所处光伏组件的表面图像,用于检测光伏组件的感知定位装置包括壳体,壳体的上端内凹形成有安装凹部,壳体的下端设置有开口,安装凹部内设置有主控驱动模块和摄像头模块。本技术的有益效果在于,提供一种结构简单、使用方便且安全可靠的用于检测光伏组件的感知定位装置。
技术研发人员:吴清健
受保护的技术使用者:深圳怪虫机器人有限公司
技术研发日:20230822
技术公布日:2024/5/20
- 还没有人留言评论。精彩留言会获得点赞!