一种光伏清扫机器人的制作方法
本技术涉及光伏板除尘装置,尤其涉及一种光伏清扫机器人。
背景技术:
1、由于对环境的越加重视,光伏发电作为清洁能源的一种,其应用越加广泛,但由于光伏板均安装在室外,随着沙尘侵蚀,光伏板面会慢慢积满灰尘等脏污物,从而导致发电量下降。因此,一些厂商选择使用光伏清扫机器人来清理,光伏清扫机器人通常只在非工作时停靠在停机位上充电,而光伏阵列大都数都是布置在空旷的地区,这些地方日常风速偏高,并且时而会有大风,因此容易将光伏清扫机器人吹离停机位,导致光伏清扫机器人无法正常充电,甚至被从停机位吹落,而损坏光伏清扫机器人。
2、为了避免光伏清扫机器人从光伏板中脱落,授权公告号为“cn217388641u”的中国实用新型专利,公开了一种在两个边缘行走装置底部设置防脱挂钩的光伏板清扫机器人,由于在边缘行走装置底部设置从光伏板的正面向背面延伸的防脱挂钩,使得该光伏板清扫机器人能够在一定程度上防止其脱落,但是不能避免光伏板清扫机器人沿着其清扫方向被风滑落,以及无法固定在停机位中,进而无法正常充电,影响产品的使用寿命。
3、因此,一种自锁功能佳,能稳定停靠在停机位进行充电的光伏清扫机器人有待设计。
技术实现思路
1、本实用新型的目的在于针对现有技术的缺陷和不足,提供了一种光伏清扫机器人,至少解决上述一个技术问题,其具有自锁功能佳,能稳定停靠在停机位进行充电的优点。
2、为实现上述目的,本实用新型提供了一种光伏清扫机器人,包括:
3、主体,包括两个边缘行走装置、装配在两个所述边缘行走装置之间的清扫装置;
4、伸缩锁定机构,固定在所述主体上,包括驱动件和伸缩件,所述伸缩件和所述驱动件的输出端连接;
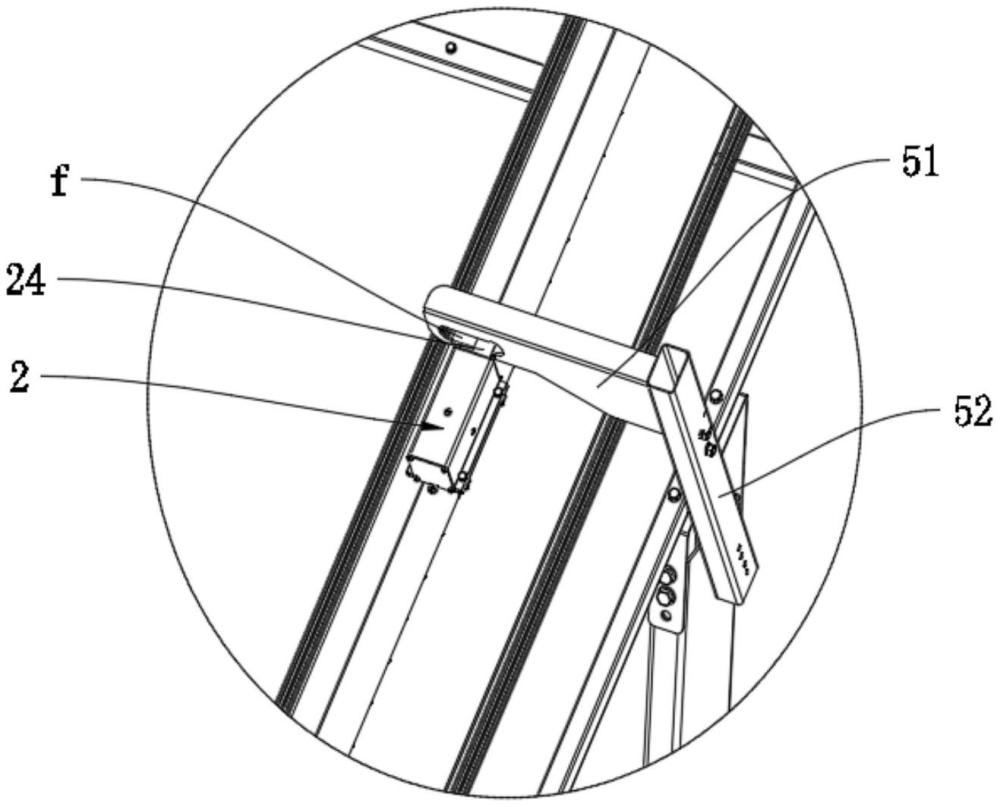
5、控制器,设置在所述主体,并和所述驱动件电连接,用于控制所述驱动件运动,以使所述伸缩件伸入停机位锁定件的锁孔中进行限位锁定,或退出停机位锁定件的锁孔进行解锁。
6、可选地,所述伸缩锁定机构固定在所述清扫装置上,且所述伸缩件的轴向和所述清扫装置的轴向平行设置。
7、可选地,所述驱动件为步进电机,所述伸缩件包括和所述步进电机的输出轴连接的丝杆,和所述丝杆螺纹连接的丝杆螺母,以及和丝杆螺母同轴连接的推杆,所述推杆内具有供所述丝杆伸入或退出的轴孔。
8、可选地,所述丝杆螺母具有和所述丝杆螺纹连接的管部,以及从所述管部外周向外凸出的挡环;所述推杆的轴孔和所述管部过盈配合,所述挡环和所述推杆之间还设有垫圈,且所述挡环通过紧固件和所述推杆固定装配。
9、可选地,所述伸缩锁定机构还包括锁壳,所述步进电机固定在所述锁壳内,所述锁壳的一端具有通孔,以供所述推杆伸出。
10、可选地,所述锁壳内设有一滑套座,所述滑套座具有滑孔,所述滑孔、所述通孔和所述推杆同轴设置,所述推杆和所述滑孔滑动连接。
11、可选地,所述滑套座靠近所述丝杆螺母一端的滑孔内周具有一限位倾斜面,所述推杆的外周具有和所述限位倾斜面配合的限位平面,用于限制所述推杆做轴向转动。
12、可选地,所述滑套座的内周面和所述推杆的外周面之间设置有耐磨套;所述推杆远离所述丝杆螺母的一端的轴孔处设置有孔塞。
13、可选地,所述清扫装置上侧设置有一和两个所述边缘行走装置转动连接的连接轴,所述锁壳通过抱箍固定在所述连接轴上。
14、可选地,所述边缘行走装置包括安装在所述边缘行走装置靠近底部位置的,用于与光伏板边框正面或轨道正面配合的至少两个行走轮,和用于与光伏板边框的侧面或轨道的侧面配合的纠偏轮,以及安装在所述边缘行走装置底部的从光伏板的正面向背面延伸的防脱挂钩。
15、与现有技术相比,本申请的优点在于:
16、由于在主体上设置伸缩锁定机构和控制器,且锁定机构和控制器电连接,伸缩锁定机构包括驱动件和伸缩件,伸缩件和驱动件的输出端连接,因此,在停机位时,伸缩件能在控制器的控制下实现伸入或退出停机位锁定件的锁孔,以和停机位锁定件的锁孔配合进行锁定或解锁操作。如此,在光伏清扫机器人在停机位处于非工作状态时,其能稳定地停靠在停机位中,进行稳定的充电,避免清扫机器人被吹落损坏。
技术特征:
1.一种光伏清扫机器人,其特征在于,包括:
2.如权利要求1所述的光伏清扫机器人,其特征在于,所述伸缩锁定机构(2)固定在所述清扫装置(12)上,且所述伸缩件的轴向和所述清扫装置(12)的轴向平行设置。
3.如权利要求1所述的光伏清扫机器人,其特征在于,所述驱动件为步进电机(21),所述伸缩件包括和所述步进电机(21)的输出轴连接的丝杆(22),和所述丝杆(22)螺纹连接的丝杆螺母(23),以及和丝杆螺母(23)同轴连接的推杆(24),所述推杆(24)内具有供所述丝杆(22)伸入或退出的轴孔(a)。
4.如权利要求3所述的光伏清扫机器人,其特征在于,所述丝杆螺母(23)具有和所述丝杆(22)螺纹连接的管部(231),以及从所述管部(231)外周向外凸出的挡环(232);所述推杆(24)的轴孔(a)和所述管部(231)过盈配合,所述挡环(232)和所述推杆(24)之间还设有垫圈(25),且所述挡环(232)通过紧固件和所述推杆(24)固定装配。
5.如权利要求4所述的光伏清扫机器人,其特征在于,所述伸缩锁定机构(2)还包括锁壳(26),所述步进电机(21)固定在所述锁壳(26)内,所述锁壳(26)的一端具有通孔(c),以供所述推杆(24)伸出。
6.如权利要求5所述的光伏清扫机器人,其特征在于,所述锁壳(26)内设有一滑套座(27),所述滑套座(27)具有滑孔(d),所述滑孔(d)、所述通孔(c)和所述推杆(24)同轴设置,所述推杆(24)和所述滑孔(d)滑动连接。
7.如权利要求6所述的光伏清扫机器人,其特征在于,所述滑套座(27)靠近所述丝杆螺母(23)一端的滑孔(d)内周具有一限位倾斜面(e),所述推杆(24)的外周具有和所述限位倾斜面(e)配合的限位平面(b),用于限制所述推杆(24)做轴向转动。
8.如权利要求6所述的光伏清扫机器人,其特征在于,所述滑套座(27)的内周面和所述推杆(24)的外周面之间设置有耐磨套(28);所述推杆(24)远离所述丝杆螺母(23)的一端的轴孔(a)处设置有孔塞(29)。
9.如权利要求5所述的光伏清扫机器人,其特征在于,所述清扫装置(12)上侧设置有一和两个所述边缘行走装置(11)转动连接的连接轴(13),所述锁壳(26)通过抱箍(3)固定在所述连接轴(13)上。
10.如权利要求1至9任一项所述的光伏清扫机器人,其特征在于,所述边缘行走装置(11)包括安装在所述边缘行走装置(11)靠近底部位置的,用于与光伏板边框正面或轨道正面配合的至少两个行走轮(111),和用于与光伏板边框的侧面或轨道的侧面配合的纠偏轮(112),以及安装在所述边缘行走装置(11)底部的从光伏板的正面向背面延伸的防脱挂钩(113)。
技术总结
本技术提供一种光伏清扫机器人,涉及光伏板除尘装置技术领域,包括主体、伸缩锁定机构和控制器。其中,主体包括两个边缘行走装置、装配在两个边缘行走装置之间的清扫装置;伸缩锁定机构固定在主体上,包括驱动件和伸缩件,伸缩件和驱动件的输出端连接;控制器设置在主体,并和驱动件电连接,用于控制驱动件运动,以使伸缩件伸入停机位锁定件的锁孔中进行限位锁定,或退出停机位锁定件的锁孔进行解锁。如此,在光伏清扫机器人在停机位处于非工作状态时,其能稳定地停靠在停机位中,进行稳定的充电,避免清扫机器人被吹落损坏。
技术研发人员:张杏华,李田蓥,时永佳,金佳楠
受保护的技术使用者:廊坊思拓新能源科技有限公司
技术研发日:20230829
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!