机器人的充电方法、装置、机器人及介质与流程
本公开涉及机器人充电,尤其涉及一种机器人的充电方法、装置、机器人及介质。
背景技术:
1、随着人工智能的快速发展,机器人成为一种常见的家庭和商业场所清扫泳池的解决方案。机器人使用电池作为能源源,为其提供动力。为了保证机器人的连续工作,充电是必不可少的环节。目前,常见的充电方式是将机器人外接的电池模组移动到充电桩,并与充电桩的极片进行连接以进行充电。然而,这种充电方式存在一些技术问题,需要加以解决。由于电池模组是通过线外接在机器人上,存在无法找到充电桩的情况。这可能是由于机器人在清扫过程中远离了充电桩,或者充电桩被遮挡或移动了位置。这种情况下,机器人无法及时充电,影响了其连续工作的能力。机器人在清扫泳池时需要自主移动,而通过外接电池模组的方式可能增加了机器被困的几率。例如,电池线可能会被纠缠在泳池设施或其他障碍物上,导致机器无法自由移动或被困在某个位置。在充电过程中,机器人的电池模组与充电桩的极片进行连接。然而,这种连接方式可能存在电解的风险。电解是指在电流通过极片时,极片和电池之间的电解质发生化学反应,导致极片的腐蚀和机器寿命缩减。
技术实现思路
1、有鉴于此,本公开实施例提供了一种机器人的充电方法、装置、机器人及计算机可读存储介质,以解决现有技术中无法找到充电桩、由于电池模组与机器人通过线连接增加了卡困的几率、以及充电时极片容易被点解的技术问题。
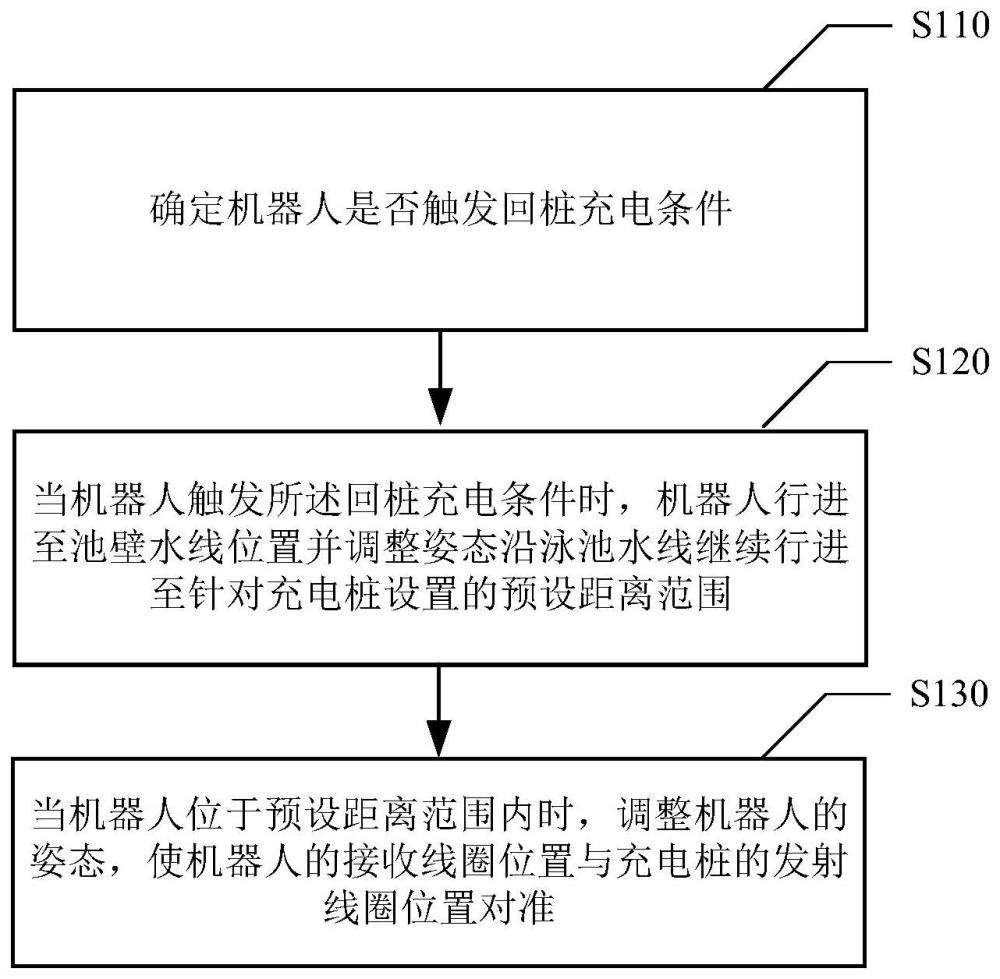
2、本公开实施例的第一方面,提供了一种机器人的充电方法,机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,其中充电桩设置于泳池池壁水线所处的位置,该方法包括确定机器人是否触发回桩充电条件;当机器人触发回桩充电条件时,机器人行进至池壁水线位置并调整姿态沿泳池水线继续行进至针对充电桩设置的预设距离范围;当机器人位于预设距离范围内时,调整机器人的姿态,使机器人的接收线圈位置与充电桩的发射线圈位置对准。
3、本公开实施例的第二方面,提供了一种机器人的充电方法,机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,其中充电桩漂浮设置于泳池水面,该方法包括:确定机器人是否触发回桩充电条件;当机器人触发回桩充电条件时,机器人行进至池壁水线位置并调整姿态以水面行进方式继续行进至针对充电桩设置的预设距离范围,或者机器人行进至充电桩对应于池底的位置,并上浮至充电桩设置的预设距离范围;当机器人位于预设距离范围内时,调整机器人的姿态,使机器人的接收线圈位置与充电桩的发射线圈位置对准。
4、本公开实施例的第三方面,提供了一种机器人的充电装置,机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,其中充电桩设置于泳池池壁水线所处的位置,该装置包括:确定模块,用于确定机器人是否触发回桩充电条件;驱动模块,用于当机器人触发回桩充电条件时,机器人行进至池壁水线位置并调整姿态沿泳池水线继续行进至针对充电桩设置的预设距离范围;对准模块,当机器人位于预设距离范围内时,调整机器人的姿态,使机器人的接收线圈位置与充电桩的发射线圈位置对准。
5、本公开实施例的第四方面,提供了一种机器人,包括存储器、处理器以及存储在存储器中并且可在处理器上运行的计算机程序,该处理器执行计算机程序时实现如上述方法的步骤。
6、本公开实施例的第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现如上述方法的步骤。
7、本公开实施例与现有技术相比存在的有益效果是:本公开实施例可以通过在机器人中引入接收线圈,并在充电桩中设置发射线圈,实现了机器人的无线充电。这消除了传统充电方式中电池模组外接线的问题,使得机器人在充电过程中更加灵活和便捷。通过确定机器人是否触发回桩充电条件,并执行相应的行动指令,使机器人能够自动驶向充电桩进行充电。例如当机器人触发回桩充电条件时,它可以前进至预设距离范围内,并根据充电桩发射的位置信号精确驶向充电位置。这样,机器人可以自主完成充电过程,无需人工干预,提高了操作的便利性和效率。由于无线充电方式不需要电池模组外接线连接充电桩,减少了机器被困的风险。机器人可以更自由地移动和清扫泳池,不会受到外接线的限制和纠缠,提高了安全性和可靠性。另外采用无线充电方式避免了电解风险,不需要直接接触极片进行充电。这样可以减少电解对极片的腐蚀,延长了机器人的使用寿命。
技术特征:
1.一种机器人的充电方法,其特征在于,所述机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,其中所述充电桩设置于泳池池壁水线所处的位置,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述确定所述机器人是否触发回桩充电条件包括:
3.根据权利要求1所述的方法,其特征在于,所述机器人行进至池壁水线位置并调整姿态沿水线继续行进至针对所述充电桩设置的预设距离范围包括:
4.根据权利要求1所述的方法,其特征在于,所述机器人行进至池壁水线位置并调整姿态沿水线继续行进至针对所述充电桩设置的预设距离范围包括:
5.根据权利要求1所述的方法,其特征在于,所述调整所述机器人的姿态,使所述机器人的接收线圈位置与所述充电桩的发射线圈位置对准包括:
6.根据权利要求1所述的方法,其特征在于,至少在所述机器人的接收线圈位置和所述充电桩的发射线圈位置之一处分别设置有相互作用的第一磁吸件和第二磁吸件。
7.根据权利要求1所述的方法,其特征在于,在所述机器人的接收线圈位置与所述充电桩的发射线圈位置对准之后,所述方法还包括:
8.根据权利要求1所述的方法,其特征在于,使所述机器人的接收线圈位置与所述充电桩的发射线圈位置对准包括:
9.一种机器人的充电方法,其特征在于,所述机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,其中所述充电桩漂浮设置于泳池水面,所述方法包括:
10.一种机器人的充电方法,其特征在于,所述机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,其中所述充电桩设置于泳池预设深度的池壁上,所述方法包括:
11.一种机器人的充电装置,其特征在于,所述机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,其中所述充电桩设置于泳池池壁水线所处的位置,所述装置包括:
12.一种机器人,包括存储器、处理器以及存储在所述存储器中并且可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1到8中任一项所述方法的步骤或实现如权利要求9所述方法的步骤或实现如权利要求10所述方法的步骤。
13.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1到8中任一项所述方法的步骤或实现如权利要求9所述方法的步骤或实现如权利要求10所述方法的步骤。
技术总结
本公开涉及机器人无线充电技术领域,提供了一种机器人的充电方法,机器人中包含接收线圈,用于接收充电桩中发射线圈传输的无线能量,方法包括确定机器人是否触发无线充电条件;当机器人触发无线充电条件时,执行前进指令驱动机器人行驶至针对充电桩设置的预设距离范围;当泳池机器行驶至预设距离范围内时,接收充电桩发射的位置信号;根据充电桩发射的位置信号驱动机器人行驶至充电桩的充电位置,以使得机器人的接收线圈与充电桩的发射线圈建立连接以对机器人进行无线充电。本公开的技术方案通过引入无线充电技术、自动驶向充电桩和精确定位连接等功能,解决了传统机器人充电方式存在的问题。
技术研发人员:汪洋
受保护的技术使用者:元鼎智能创新(国际)有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!