一种基于零矢量脉宽调制的转速追踪方法及装置与流程
本发明涉及电机控制,特别是涉及一种基于零矢量脉宽调制的转速追踪方法及装置。
背景技术:
1、永磁同步电机(permanent magnet synchronous motor,pmsm)因其高效率和高功率密度而被用于许多应用。附着永磁体磁性材料和电力电子新技术的进一步发展,永磁同步电机势必会逐渐取代传统的异步电机,对于控制算法的改进研究有着十分重大的意义。
2、在当前永磁同步电机转速追踪方案中存在电机的转速测量存在误差,由于每个变频器在转速追踪时对应的零电压脉冲宽度和时间间隔不同,导致无法以统一的参数触发脉冲。若不满足上述两种参数对应的检测要求,则会导致得到的转速不准确。其次,由于存在时间间隔,在脉冲触发时获取的反馈电流可能存在干扰且检测方式离散,导致获取到不准确的数据,得到的转速不准确。另外,零电压脉冲的电流响应处于不可控状态,转速较高的情况下容易造成电流过流。
3、因此,如何提高转速的准确性和克服零电压脉冲电流响应不可控状态是本领域技术人员亟需要解决的技术问题。
技术实现思路
1、本发明的目的是提供一种基于零矢量脉宽调制的转速追踪方法及装置,以解决当前永磁同步电机转速追踪方案中的转速不准确以及零电压脉冲的电流响应处于不可控状态时容易造成电流过流的技术问题。
2、为解决上述技术问题,本发明一种基于零矢量脉宽调制的转速追踪方法,包括:
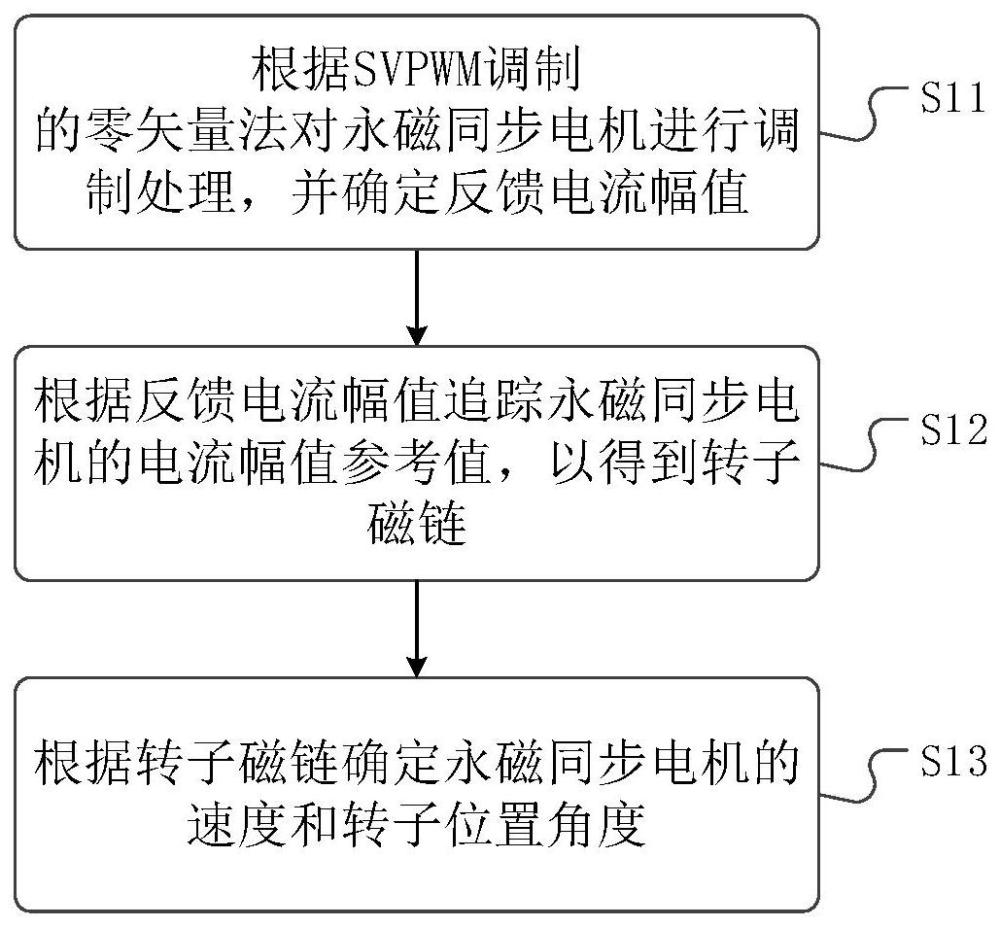
3、根据svpwm调制的零矢量法对永磁同步电机进行调制处理,并确定反馈电流幅值;
4、根据所述反馈电流幅值追踪所述永磁同步电机的电流幅值参考值,以得到转子磁链;
5、根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度。
6、优选地,所述根据svpwm调制的零矢量法对永磁同步电机进行调制处理,并确定反馈电流幅值,包括:
7、根据所述svpwm调制的零矢量法,确定逆变器的脉冲宽度值;
8、根据所述脉冲宽度值,确定所述永磁同步电机的两相静止坐标系下的第一轴和第二轴分别对应的电流分量;
9、根据所述第一轴和第二轴分别对应的电流分量,确定反馈电流幅值。
10、优选地,所述电流幅值参考值的确定过程,包括:
11、获取所述永磁同步电机的额定电流;
12、根据所述永磁同步电机的额定电流的预设倍数确定电流幅值参考值。
13、优选地,所述根据所述svpwm调制的零矢量法,确定逆变器的脉冲宽度值,包括:
14、在载波周期内,控制所述逆变器的三相上桥臂的开关管处于断开状态;
15、控制所述逆变器的三相下桥臂的开关管以零矢量方式连续导通与断开,以确定所述逆变器的脉冲宽度值。
16、优选地,所述根据所述反馈电流幅值追踪所述永磁同步电机的电流幅值参考值,以得到转子磁链,包括:
17、在逆变器的三相下桥臂的开关管处于导通状态时,确定所述永磁同步电机的三相绕组端电压值;所述三相绕组端电压值由pi调节器调节控制得到;
18、获取所述永磁同步电机的电机绕组电阻值;
19、根据所述三相绕组端电压值、第一轴的电流分量、第二轴的电流分量和所述电机绕组电阻值的关系确定定子磁链;
20、获取所述永磁同步电机的两相静止坐标系下第一轴电感和第二轴电感;
21、根据所述定子磁链、所述第一轴电感和所述第二轴电感的关系确定所述转子磁链。
22、优选地,所述根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度,包括:
23、获取所述转子磁链对应的两相静止坐标系下的第一轴磁链和第二轴磁链;
24、根据所述第一轴磁链和第二轴磁链进行反正切处理,确定所述永磁同步电机的所述转子位置角度;
25、根据所述永磁同步电机的相位角,确定所述永磁同步电机的速度。
26、优选地,在所述根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度之前,还包括:
27、对所述转子磁链进行滤波以确定滤波后的转子磁链;
28、将滤波后的转子磁链进行正交归一化处理,得到处理后的转子磁链,并进入至所述根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度的步骤。
29、优选地,所述对所述转子磁链进行滤波以确定滤波后的转子磁链,包括:
30、若定子磁链的确定过程中由电阻电压积分确定,则对所述转子磁链进行高通滤波处理,确定滤波后的转子磁链;
31、若所述定子磁链的确定过程中未由电阻电压积分确定,则对所述转子磁链进行低通滤波处理,确定滤波后的转子磁链。
32、优选地,在所述将滤波后的转子磁链进行正交归一化处理,得到处理后的转子磁链之后,还包括:
33、通过锁相环追踪处理后的所述转子磁链,并进入至所述根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度的步骤。
34、为了解决上述技术问题,本发明还提供了一种基于零矢量脉宽调制的转速追踪装置,包括:
35、第一确定模块,用于根据svpwm调制的零矢量法对永磁同步电机进行调制处理,并确定反馈电流幅值;
36、第二确定模块,用于根据所述反馈电流幅值追踪所述永磁同步电机的电流幅值参考值,以得到转子磁链;
37、第三确定模块,用于根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度。
38、本发明提供的一种基于零矢量脉宽调制的转速追踪方法,根据svpwm调制的零矢量法对永磁同步电机进行调制处理,并确定反馈电流幅值;根据反馈电流幅值追踪永磁同步电机的电流幅值参考值,以得到转子磁链;根据转子磁链确定永磁同步电机的速度和转子位置角度。本发明采用svpwm调制的零矢量法进行调制处理,通过调制方式无需等到电流衰减为0的情况下再触发导致时间间隔较长,直接触发脉冲宽度,使得估算速度范围较宽以及检测方式连续,获取到准确的转速。在电机转速估算过程中,根据反馈电流幅值追踪永磁同步电机的电流幅值参考值,若将反馈电流幅值控制在极小的范围内,使得定子磁链和转子磁链趋近于重合,以实现在很短的时间内估算出电机的方向和转速,且无电流冲击地切换至正常运行状态,使得零电压脉冲的电流响应处于可控状态,避免电流过流现象发生。
39、另外,本发明还提供了一种基于零矢量脉宽调制的转速追踪装置,具有如上述基于零矢量脉宽调制的转速追踪方法相同的有益效果。
技术特征:
1.一种基于零矢量脉宽调制的转速追踪方法,其特征在于,包括:
2.根据权利要求1所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,所述根据svpwm调制的零矢量法对永磁同步电机进行调制处理,并确定反馈电流幅值,包括:
3.根据权利要求1或2所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,所述电流幅值参考值的确定过程,包括:
4.根据权利要求2所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,所述根据所述svpwm调制的零矢量法,确定逆变器的脉冲宽度值,包括:
5.根据权利要求1所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,所述根据所述反馈电流幅值追踪所述永磁同步电机的电流幅值参考值,以得到转子磁链,包括:
6.根据权利要求1所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,所述根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度,包括:
7.根据权利要求6所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,在所述根据所述转子磁链确定所述永磁同步电机的速度和转子位置角度之前,还包括:
8.根据权利要求7所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,所述对所述转子磁链进行滤波以确定滤波后的转子磁链,包括:
9.根据权利要求7或8所述的基于零矢量脉宽调制的转速追踪方法,其特征在于,在所述将滤波后的转子磁链进行正交归一化处理,得到处理后的转子磁链之后,还包括:
10.一种基于零矢量脉宽调制的转速追踪装置,其特征在于,包括:
技术总结
本发明公开了一种基于零矢量脉宽调制的转速追踪方法及装置,涉及电机控制技术领域。采用SVPWM调制的零矢量法进行调制处理,无需等到电流衰减为0的情况下再触发导致时间间隔较长,直接触发脉冲宽度,使得估算速度范围较宽以及检测方式连续,获取到准确的转速。在电机转速估算过程中,根据反馈电流幅值追踪永磁同步电机的电流幅值参考值,若将反馈电流幅值控制在极小的范围内,使得定子磁链和转子磁链趋近于重合,以实现在很短的时间内估算出电机的方向和转速,且无电流冲击地切换至正常运行状态,使得零电压脉冲的电流响应处于可控状态,避免电流过流现象发生。
技术研发人员:蒋玉华,高瞻,王靖腾,王二峰,沈文
受保护的技术使用者:深圳市英威腾电气股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!