无人机的控制方法、装置及存储介质与流程
本申请涉及无人机领域,尤其涉及一种无人机的控制方法、装置及存储介质。
背景技术:
1、相关技术中,3gpp(3rd generation partnership project,第三代合作伙伴计划)定义了无人机(uncrewed aerial vehicle,简称uav)的应用架构,无人机系统服务提供者(uas service supplier,uss)仅服务于一个特定区域,其中,uas是指无人机系统(uavsystem)。即相关技术仅支持无人机系统服务提供者不变更的情况,不支持无人机系统服务提供者迁移(uss relocation)的场景。
2、因此,现有3gpp定义的无人机架构中,一个无人机系统服务提供者仅服务于一个特定区域,即仅支持无人机系统服务提供者不变更的情况,一旦无人机离开该无人机系统服务提供者所服务的区域,则无人机处于黑飞状态,运营者将失去对无人机的监管和跟踪。
技术实现思路
1、有鉴于此,本申请实施例提供了一种无人机的控制方法、装置及存储介质,旨在提高无人机控制的可靠性。
2、本申请实施例的技术方案是这样实现的:
3、第一方面,本申请实施例提供了一种无人机的控制方法,应用于第一网元,所述方法包括:
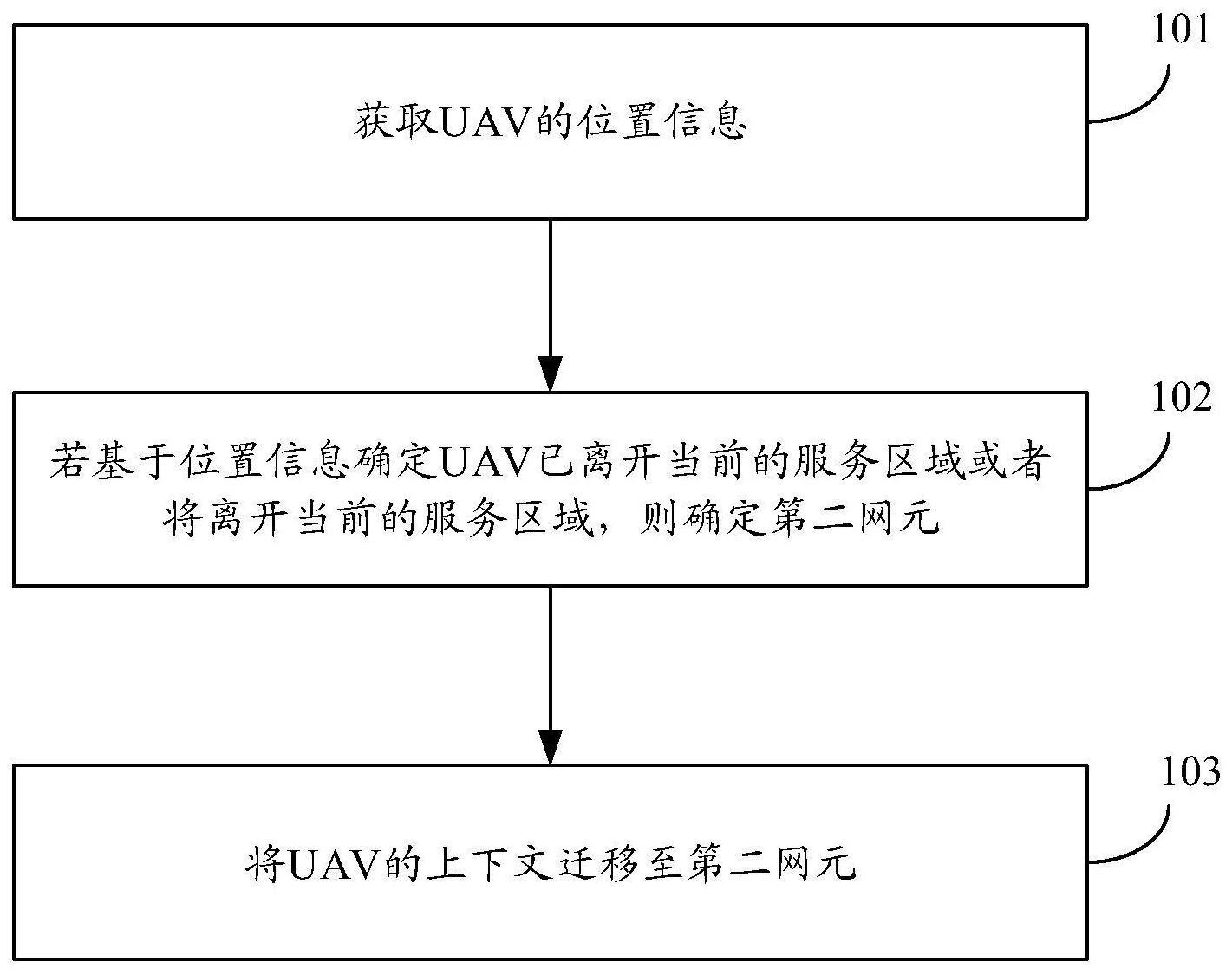
4、获取无人机(uav)的位置信息;
5、若基于所述位置信息确定所述uav已离开当前的服务区域或者将离开当前的服务区域,则确定第二网元;
6、将所述uav的上下文迁移至第二网元。
7、上述方案中,所述基于所述位置信息确定所述uav已离开当前的服务区域,包括:
8、基于移动性管理网元、网关移动位置中心(gmlc)或者位置管理功能(lmf)发送的所述uav的当前位置,确定所述uav已离开当前的服务区域。
9、上述方案中,所述基于所述位置信息确定所述uav将离开当前的服务区域,包括:
10、基于数据分析网元发送的所述uav的预测位置,确定所述uav将离开当前的服务区域。
11、上述方案中,所述确定第二网元,包括:
12、基于本地存储的配置信息确定第二网元;或者,
13、向域名解析系统(dns)发送第一请求,所述第一请求携带所述位置信息;基于所述dns返回的第一响应确定第二网元;或者,
14、向网络仓储功能(nrf)发送第二请求,所述第二请求携带所述位置信息;基于所述nrf返回的第二响应确定第二网元。
15、上述方案中,所述获取uav的位置信息,包括:
16、基于订阅的所述uav的位置报告的事件,获取所述uav的位置信息。
17、上述方案中,所述方法还包括:
18、执行所述uav的无人机系统服务提供者的uav授权及认证(uuaa)的撤回。
19、上述方案中,所述上下文包括以下至少之一:所订阅的事件、被订阅者地址和无人机系统网络功能(uas nf)的地址。
20、上述方案中,所述第一网元和/或所述第二网元为无人机系统服务提供者(uss)。
21、第二方面,本申请实施例提供了一种无人机的控制方法,应用于第二网元,所述方法包括:
22、接收无人机(uav)的上下文;
23、发起所述uav的无人机系统服务提供者的uav授权及认证(uuaa)的重新授权。
24、上述方案中,所述发起所述uav的uuaa的重新授权,包括:
25、通过无人机系统网络功能(uas nf)发送uuaa的重新授权请求;
26、其中,所述上下文包括以下至少之一:所订阅的事件、被订阅者地址和uas nf的地址;所述重新授权请求携带所述第二网元的地址。
27、上述方案中,所述方法还包括:
28、发起所述uav的uuaa的重鉴权。
29、上述方案中,所述方法还包括:
30、基于所述上下文订阅所述uav的位置报告的事件。
31、第三方面,本申请实施例提供了一种无人机的控制装置,应用于第一网元,包括:
32、获取模块,用于获取无人机(uav)的位置信息;
33、确定模块,用于若基于所述位置信息确定所述uav已离开当前的服务区域或者将离开当前的服务区域,则确定第二网元;
34、第一迁移模块,用于将所述uav的上下文迁移至第二网元。
35、第四方面,本申请实施例提供了一种无人机的控制装置,应用于第二网元,包括:
36、接收模块,用于接收无人机(uav)的上下文;
37、第二迁移模块,用于发起所述uav的无人机系统服务提供者的uav授权及认证(uuaa)的重新授权。
38、第五方面,本申请实施例提供了一种无人机系统服务提供设备,包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器,其中,所述处理器,用于运行计算机程序时,执行本申请实施例第一方面所述方法的步骤。
39、第六方面,本申请实施例提供了一种无人机系统服务提供设备,包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器,其中,所述处理器,用于运行计算机程序时,执行本申请实施例第二方面所述方法的步骤。
40、第七方面,本申请实施例提供了一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现本申请实施例任一所述方法的步骤。
41、本申请实施例提供的技术方案,获取uav的位置信息;若基于位置信息确定uav已离开当前的服务区域或者将离开当前的服务区域,则确定第二网元;将uav的上下文迁移至第二网元。如此,可以不受限于当前的第一网元的服务区域,支持uav的服务区域迁移的场景,进而提高了uav控制的可靠性。
技术特征:
1.一种无人机的控制方法,应用于第一网元,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述位置信息确定所述uav已离开当前的服务区域,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述位置信息确定所述uav将离开当前的服务区域,包括:
4.根据权利要求1所述的方法,其特征在于,所述确定第二网元,包括:
5.根据权利要求1所述的方法,其特征在于,所述获取uav的位置信息,包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,
8.根据权利要求1所述的方法,其特征在于,
9.一种无人机的控制方法,应用于第二网元,其特征在于,所述方法包括:
10.根据权利要求9所述的方法,其特征在于,所述发起所述uav的uuaa的重新授权,包括:
11.根据权利要求9所述的方法,其特征在于,所述方法还包括:
12.根据权利要求9所述的方法,其特征在于,所述方法还包括:
13.一种无人机的控制装置,应用于第一网元,其特征在于,包括:
14.一种无人机的控制装置,应用于第二网元,其特征在于,包括:
15.一种无人机系统服务提供设备,其特征在于,包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器,其中,
16.一种无人机系统服务提供设备,其特征在于,包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器,其中,
17.一种存储介质,所述存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至12任一项所述方法的步骤。
技术总结
本申请公开了一种无人机的控制方法、装置及存储介质。该方法包括:获取无人机(UAV)的位置信息;若基于位置信息确定UAV已离开当前的服务区域或者将离开当前的服务区域,则确定第二网元;将UAV的上下文迁移至第二网元。如此,可以不受限于当前的第一网元的服务区域,支持UAV的服务区域迁移的场景,进而提高了UAV控制的可靠性。
技术研发人员:李爱华,张昊
受保护的技术使用者:中国移动通信有限公司研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!