智能动态侦测系统及其控制方法与流程
本申请涉及图像拍摄领域,特别涉及基于图像的侦测技术。
背景技术:
1、本部分旨在为权利要求书中陈述的本申请的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是已被公开的现有技术。
2、普通的摄像头拍摄的图像都是二维的。如果使用结构光,并采用特殊的图像处理方式,可以得到被拍摄对象各个点的深度信息(或者称为距离),基于这些深度信息,可以构建被拍摄对象的三维形状。例如公告号为us6,549,288b1的美国专利公开了一种基于结构光、三角测量的三维数字化仪,其将特殊的结构光投射至被拍摄对象,依照感光组件获取的影像位置,使用三角量测法得到被拍摄对象三维点位置,再构建出被拍摄对象的三维形状。
3、此外,随着人工智能(ai)技术的快速发展,图像识别技术越来越成熟。使用图像识别技术,可以较为准确地将图像中的各个物体识别出来。
4、然而,本申请的发明人发现,基于结构光的三维拍摄技术和一般的ai图像识别技术在同时使用时会有冲突。因为结构光会导致所拍摄的图像上有结构光光斑,从而导致已经训练好的ai图像识别模型识别能力下降,需要使用含有结构光光斑的图像重新训练ai图像识别模型,而这种训练的运算量可能非常大。
技术实现思路
1、本申请的目的在于提供一种智能动态侦测系统及其控制方法,使得结构光的三维拍摄技术和一般的ai图像识别技术可以协同使用,相互不干扰。
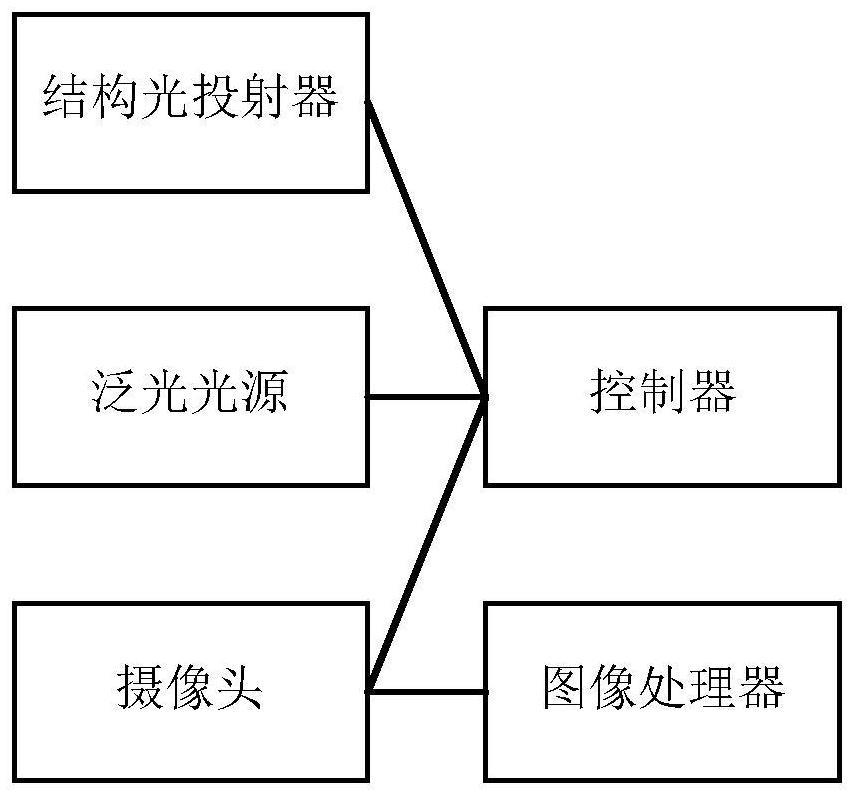
2、本申请公开了一种,智能动态侦测系统,包括:结构光投射器、泛光光源、摄像头和控制器;
3、所述控制器被配置为控制所述结构光投射器和泛光光源在不同时间片的照射强度,使得所述结构光投射器和所述泛光光源的照射强度的组合在连续的n个时间片中的至少两个时间片是不同的,n为大于1的整数;
4、所述摄像头被配置为在每一个所述时间片中至少拍摄一帧图像。
5、在一个优选例中,还包括图像处理器,其被配置为,根据在所述结构光投射器的照射强度大于预定阈值的时间片拍摄的图像计算被拍摄物体的距离,以及,根据在所述结构光投射器的照射强度小于预定阈值的时间片拍摄的图像进行物体识别。
6、在一个优选例中,所述控制器被配置为控制所述结构光投射器和所述泛光光源按照时间片交替照射。
7、在一个优选例中,所述控制器被配置为根据如下模式控制所述结构光投射器和所述泛光光源,
8、每四个连续时间片为一个周期进行周期性重复,
9、在每一周期的第一个时间片,所述结构光投射器和所述泛光光源均照射;
10、在每一周期的第二个时间片,所述结构光投射器不照射,而所述泛光光源照射;
11、在每一周期的第三个时间片,所述结构光投射器照射,而所述泛光光源不照射;
12、在每一周期的第四个时间片,所述结构光投射器不照射,而所述泛光光源照射。
13、在一个优选例中,所述摄像头是两个,所述图像处理器被配置为根据两个摄像头同时拍摄的图像计算被拍摄物体的距离。
14、本申请还公开了一种智能动态侦测系统的控制方法,所述系统为前文描述的系统;所述方法包括:
15、所述控制器获取当前环境的亮度;
16、所述控制器确定所述亮度高于预定门限,则以第一时序模式控制所述结构光投射器和泛光光源在不同时间片的照射强度;
17、所述控制器确定所述亮度低于预定门限,则以第二时序模式控制所述结构光投射器和泛光光源在不同时间片的照射强度;
18、所述第一时序模式和所述第二时序模式包括在每一个时间片中所述结构光投射器的照射强度和所述泛光光源的照射强度的控制信息。
19、本申请还公开了一种智能动态侦测系统的控制方法,所述系统为前文描述的系统;所述方法包括:
20、所述控制器获取所述摄像头输出的实时图像;
21、根据所获取的实时图像,确定该实时图像处于过度曝光状态;
22、所述控制器在之后的每一个时间片都控制所述泛光灯处于照射状态,直到新获取的实时图像不再处于过度曝光状态;或者,所述控制器在之后的各时间片增加所述泛光灯处于照射状态的比例,直到新获取的实时图像不再处于过度曝光状态。
23、在一个优选例中,所述控制器在检测图像处于过度曝光状态之前以第三时序模式控制所述结构光投射器和泛光光源在不同时间片的照射强度;
24、当新获取的图像不再处于过度曝光状态时,所述控制器恢复到以第三时序模式控制所述结构光投射器和泛光光源在不同时间片的照射强度。
25、本申请还公开了一种智能动态侦测系统,包括:
26、存储器,用于存储计算机可执行指令;以及,
27、处理器,与所述存储器耦合,用于在执行所述计算机可执行指令时实现如前文描述的方法中的步骤。
28、本申请还公开了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现如前文描述的方法中的步骤。
29、本申请的实施方式中,通过对结构光投射器和泛光光源的照射时序进行控制,可以使得同一个摄像头拍摄的图像可以被用于拍摄对象深度信息的检测和图像中的对象识别,消除了结构光对用于ai图像识别的干扰。
30、此外,对于扫地机而言,通过检测当前环境的亮度,在不同的亮度下使用不同的时序模式控制结构光投射器和泛光光源在不同时间片的照射强度,可以大大增强不同场景下深度信息和对象识别的整体准确率。例如在检测到外部环境亮度突然增加(可以体现为摄像头的当前图像过度曝光)时,可以将时序模式切换为在每一帧都打开泛光光源,或者调高泛光照射帧数占整体帧数的比例,从而使得画面亮度加速调整至适当的亮度,当画面亮度稳定后,再恢复到原来的时序模式。
31、上述
技术实现要素:
中公开的各个技术特征、在下文各个实施方式和例子中公开的各技术特征、以及附图中公开的各个技术特征,都可以自由地互相组合,从而构成各种新的技术方案(这些技术方案均应该视为在本说明书中已经记载),除非这种技术特征的组合在技术上是不可行的。例如,在一个例子中公开了特征a+b+c,在另一个例子中公开了特征a+b+d+e,而特征c和d是起到相同作用的等同技术手段,技术上只要择一使用即可,不可能同时采用,特征e技术上可以与特征c相组合,则,a+b+c+d的方案因技术不可行而应当不被视为已经记载,而a+b+c+e的方案应当视为已经被记载。
技术特征:
1.一种智能动态侦测系统,其特征在于,包括:结构光投射器、泛光光源、摄像头和控制器;
2.如权利要求1所述的智能动态侦测系统,其特征在于,还包括图像处理器,其被配置为,根据在所述结构光投射器的照射强度大于预定阈值的时间片拍摄的图像计算被拍摄物体的距离,以及,根据在所述结构光投射器的照射强度小于预定阈值的时间片拍摄的图像进行物体识别。
3.如权利要求1所述的智能动态侦测系统,其特征在于,所述控制器被配置为控制所述结构光投射器和所述泛光光源按照时间片交替照射。
4.如权利要求1所述的智能动态侦测系统,其特征在于,所述控制器被配置为根据如下模式控制所述结构光投射器和所述泛光光源,
5.如权利要求2所述的智能动态侦测系统,其特征在于,所述摄像头是两个,所述图像处理器被配置为根据两个摄像头同时拍摄的图像计算被拍摄物体的距离。
6.一种智能动态侦测系统的控制方法,其特征在于,所述系统为权利要求1所述的系统;所述方法包括:
7.一种智能动态侦测系统的控制方法,其特征在于,所述系统为权利要求1所述的系统;所述方法包括:
8.如权利要求7所述的智能动态侦测系统的控制方法,其特征在于,
9.一种智能动态侦测系统,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现如权利要求1至6中任意一项所述的方法中的步骤。
技术总结
本申请涉及图像拍摄领域,公开了一种智能动态侦测系统及其控制方法,使得结构光的三维拍摄技术和一般的AI图像识别技术可以协同使用,相互不干扰。该系统包括:结构光投射器、泛光光源、摄像头和控制器;该控制器被配置为控制结构光投射器和泛光光源在不同时间片的照射强度,使得结构光投射器和泛光光源的照射强度的组合在连续的N个时间片中的至少两个时间片是不同的,N为大于1的整数;该摄像头被配置为在每一个该时间片中至少拍摄一帧图像。
技术研发人员:林芃威,卢一斌
受保护的技术使用者:神顶科技(南京)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!