一种分体式农业滑索巡检机器人
1.本实用新型涉及巡检机器人技术领域,具体是一种分体式农业滑索巡检机器人。
背景技术:
2.巡检机器人目前主要的应用为电力场景、隧道场景以及机房场景的巡检,根据场景主要分为轮式巡检机器人以及轨道式巡检机器人,但由于成本问题,巡检机器人还未能全面铺开,各个场景的巡检工作还是以人力巡检为主。目前,在我国传统的农业巡检方式仍为人工巡检,但传统的人工巡检一般是枯燥、重复性强、机械性、耗时费力的劳动密集型工作,并且巡检易受天气问题影响,巡检不精细,能得到的巡检结果依靠人力记录,费时费力。
3.因此,基于具体农业生产环境与现实条件考虑,设计一种稳定且低成本的分体式农业滑索巡检机器人来代替人工执行农业巡检工作是必要的。
技术实现要素:
4.本实用新型旨在通过提供一种分体式农业滑索巡检机器人来解决背景技术中存在的缺点。
5.为了实现所述发明目的,本实用新型采用如下技术方案:
6.一种分体式农业滑索巡检机器人,包括塔架控制端和机器人车体部分,包括工控机、伺服电机、减速器、尼龙驱动轮,承重索、牵引索、网桥、电源模块、交换机、串口服务器、云台、全景相机、红外相机、光学一体机、温湿度、光照、二氧化碳传感器、rfid标签和加紧轮,其特征在于,所述分体式农业滑索巡检机器人由塔架控制端电机驱动牵引所带动进行,进行农业巡检数据及气环境数据的采集,并且可实现巡检机器人的精确定位。
7.作为本实用新型的进一步优化方案,所述塔架控制端为工控机、伺服电机、减速器、尼龙驱动轮、承重索和牵引索所组成的控制系统,牵引索为闭环线路,伺服电机连接尼龙驱动轮带动牵引索牵引机器人车体移动。
8.作为本实用新型的进一步优化方案,所述承重索为两股单向带电缆线,可作机器人运行轨道及供电来源。
9.作为本实用新型的进一步优化方案,所述机器人车体包括网桥、电源模块、交换机、串口服务器、云台、全景相机、红外相机、光学一体机、温湿度、光照、二氧化碳传感器、rfid标签和加紧轮,四个加紧轮位于车体外部,紧扣承重索。
10.作为本实用新型的进一步优化方案,所述温湿度、光照、二氧化碳传感器安放在车体内部,可精确采集植物冠层环境数据。
11.作为本实用新型的进一步优化方案,所述云台连接光学一体机和红外热成像机,配合全景相机全方位采集巡检数据。
12.作为本实用新型的进一步优化方案,所述机器人车体采用外部伺服电机驱动,通过电机脉冲定位,且承重索上定点放置rfid标签,获取移动数据,实现精确移动定位。
附图说明
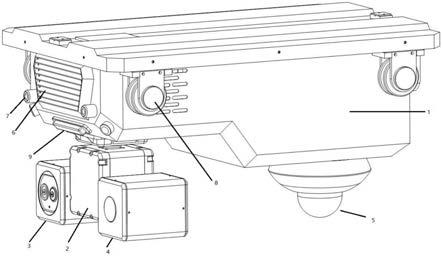
13.图1为本实用新型的整体示意图。
14.图2为本实用新型机体内部模块连接结构示意图。
15.图3为本实用新型的行驶轨道示意图。
16.图4为本实用新型塔架控制端示意图。
17.图中:1、箱体,2、云台,3、红外相机,4、光学一体机,5、全景相机,6、通风格栅,7、鹰眼灯, 8、加紧轮,9、rfid标签,10、塔架本体,11、绝缘子,12、导轮,13、伺服电机,14、驱动轮,15、牵引索,16、承重索。
具体实施方式
18.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行详细说明。
19.本实用新型公开了一种分体式农业滑索巡检机器人,结合图1、图2、图3、图4,其中图1为本分体巡检机器人的车体主体部分,包括机器人箱体1、云台2、红外相机3、光学一体机4、全景相机5、通风格栅6、鹰眼灯7、加紧轮8、rfid标签9。图2为体内部模块连接结构示意图,包括电源模块、网桥、交换机、串口服务器以及温湿度、光照、二氧化碳传感器四合一微型气象站。图3为行驶轨道示意图,包括塔架本体10、绝缘子11、导轮12、伺服电机13、驱动轮14、牵引索15、承重索16。图4为塔架控制端示意图,包括稳压电源、网络交换机、网桥、触摸屏、工业控制机、伺服电机。
20.本实用新型的巡检机器人本体通过牵引索15与承重索16悬挂在缆索上,两根承重索16与塔架本体 10固定,伺服电机13连接驱动轮14带动牵引索15移动,实现巡检机器人的移动功能。
21.红外相机3、光学一体机4、全景相机5均安装在车体下端,其中红外相机3和光学一体机4由云台2 连接,可实现多方位的图像获取,及温湿度、光照、二氧化碳传感器四合一微型气象站安装在车体内部,通过通风格栅6获取外界环境数据。通过车体内部网桥与塔架控制端网桥通信,实现数据与控制信号的传输。
22.本发明使用时,牵引索8连接电源模块,车体内部网桥与塔架控制端网桥通信,上位机平台发送指令通过网桥到工业控制机,工业控制机解析收到的信号将指令传输,实现驱动伺服电机13的行进或云台2 的操作,红外相机3、光学一体机4、全景相机5通过rs485口与工业控制机连接,工业控制机接收并存储获取图像和视频数据,完成对果园的多种图像数据的获取与巡检。
技术特征:
1.一种分体式农业滑索巡检机器人,包括塔架控制端和机器人车体部分,包括工控机、伺服电机、减速器、尼龙驱动轮,承重索、牵引索、网桥、电源模块、交换机、串口服务器、云台、全景相机、红外相机、光学一体机、温湿度、光照、二氧化碳传感器、rfid标签和加紧轮,其特征在于,所述分体式农业滑索巡检机器人由塔架控制端电机驱动牵引所带动进行,进行农业巡检数据及气环境数据的采集,并且可实现巡检机器人的精确定位。2.根据权利要求1所述的分体式农业滑索巡检机器人,其特征在于:所述塔架控制端为工控机、伺服电机、减速器、尼龙驱动轮、承重索和牵引索所组成的控制系统,牵引索为闭环线路,伺服电机连接尼龙驱动轮带动牵引索牵引机器人车体移动。3.根据权利要求1所述的分体式农业滑索巡检机器人,其特征在于:所述承重索为两股单向带电缆线,可作机器人运行轨道及供电来源。4.根据权利要求1所述的分体式农业滑索巡检机器人,其特征在于:所述机器人车体包括网桥、电源模块、交换机、串口服务器、云台、全景相机、红外相机、光学一体机、温湿度、光照、二氧化碳传感器、rfid标签和加紧轮,四个加紧轮位于车体外部,紧扣承重索。5.根据权利要求1所述的分体式农业滑索巡检机器人,其特征在于:所述温湿度、光照、二氧化碳传感器安放在车体内部,可精确采集植物冠层环境数据。6.根据权利要求1所述的分体式农业滑索巡检机器人,其特征在于:所述云台连接光学一体机和红外热成像机,配合全景相机全方位采集巡检数据。7.根据权利要求1所述的分体式农业滑索巡检机器人,其特征在于:所述机器人车体采用外部伺服电机驱动,通过电机脉冲定位,且承重索上定点放置rfid标签,获取移动数据,实现精确移动定位。
技术总结
本实用新型公开了一种具有全景相机、光学全景相机、红外热成像机以及温湿度、光照、二氧化碳传感器四合一微型气象站的一种分体式农业滑索巡检机器人,属于巡检机器人技术领域,包括塔架端和巡检机器人本体,所述塔架端包括塔架本体、牵引索、两根承重索,由伺服电机驱动驱动轮带动牵引索牵引机器人本体移动。上位机发送指令通过网桥将指令传输至工业控制机控制云台转动以及伺服电机行进。本实用新型可自动获取多种巡检数据,大大节省人工巡检成本,提高巡检效率和效果,降低发生安全事故的概率。率。率。
技术研发人员:张森 韩冰 黄铝文
受保护的技术使用者:西北农林科技大学
技术研发日:2021.03.20
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1