一种机器人用场景识别摄像头的制作方法
本技术涉及摄像头,特别涉及一种机器人用场景识别摄像头。
背景技术:
1、云台摄像机在机器人应用比较广泛,需要手动进行云台控制,在自动驾驶机器人上云台摄像机的使用只能在单个方向进行视频画面捕捉,无法做到360度实时自主追踪物体。
2、目前,自动驾驶机器人对物体追踪有了更高的需求,然而市场上常见的机器人通过云台摄像机进行物体捕捉,1台摄像机视频采集视频范围有限,同一时间存在视频盲区,多台摄像机同时采集,增加了机器人的载重量和成本。
技术实现思路
1、针对现有技术中的上述不足,本实用新型提供了一种机器人用场景识别摄像头,以解决一台云台摄像机无法360度采集画面以及同步360度实时自主追踪物体的问题。
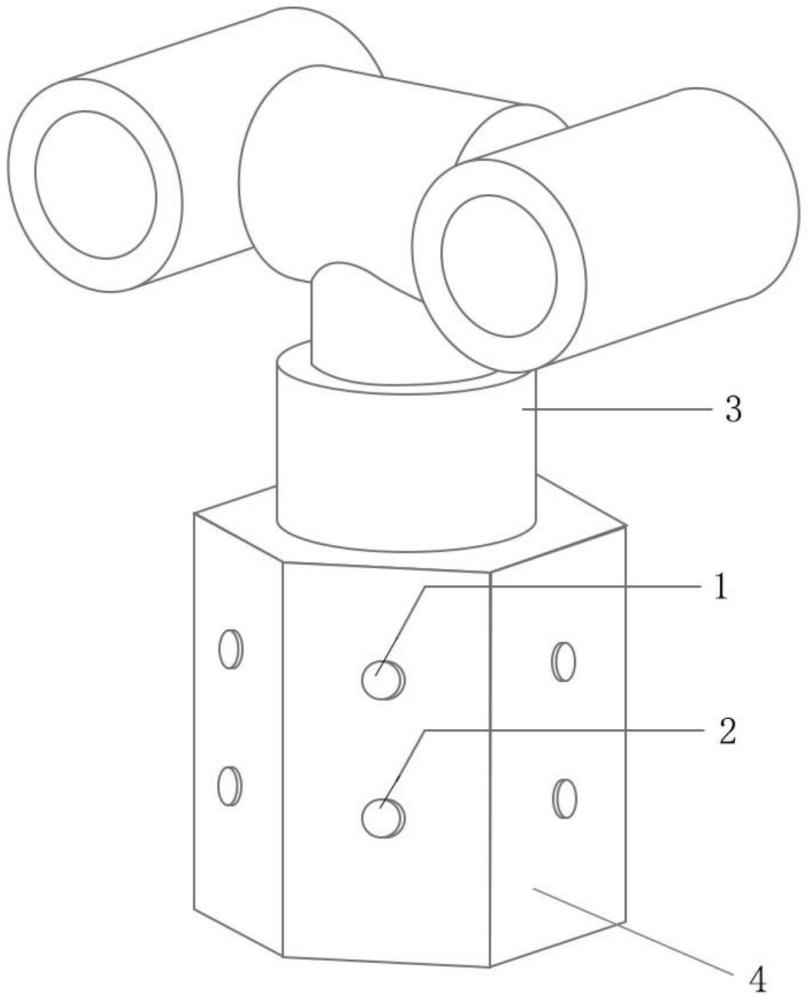
2、为了达到上述实用新型目的,本实用新型采用的技术方案为:一种机器人用场景识别摄像头,包括六菱柱结构的安装座,所述安装座上壁转动安装设有云台摄像头,所述安装座的六个侧面上侧分别安装设有视频采集摄像头,所述安装座的六个侧面下侧分别安装设有视频抓拍摄像头。
3、作为改进:所述安装座单个侧面上的视频采集摄像头和视频抓拍摄像头均位于垂直中线上。
4、作为改进:同侧所述视频采集摄像头和视频抓拍摄像头之间的垂直距离为2厘米。
5、作为改进:全部所述视频采集摄像头处于同一高度,全部所述视频抓拍摄像头处于同一高度。
6、本实用新型与现有技术相比优点在于:
7、将装置整体安装于自动驾驶的机器人上,在机器人行驶过程中,通过六个视频采集摄像头和六个视频抓拍摄像头的作用,能够完成360度采集环境画面,同时在云台摄像头的作用下,能够同步360度实时自主追踪物体。
技术特征:
1.一种机器人用场景识别摄像头,包括六菱柱结构的安装座(4),其特征在于:所述安装座(4)上壁转动安装设有云台摄像头(3),所述安装座(4)的六个侧面上侧分别安装设有视频采集摄像头(1),所述安装座(4)的六个侧面下侧分别安装设有视频抓拍摄像头(2)。
2.根据权利要求1所述的一种机器人用场景识别摄像头,其特征在于:所述安装座(4)单个侧面上的视频采集摄像头(1)和视频抓拍摄像头(2)均位于垂直中线上。
3.根据权利要求1所述的一种机器人用场景识别摄像头,其特征在于:同侧所述视频采集摄像头(1)和视频抓拍摄像头(2)之间的垂直距离为2厘米。
4.根据权利要求1所述的一种机器人用场景识别摄像头,其特征在于:全部所述视频采集摄像头(1)处于同一高度,全部所述视频抓拍摄像头(2)处于同一高度。
技术总结
本技术涉及一种机器人用场景识别摄像头,包括六菱柱结构的安装座,所述安装座上壁转动安装设有云台摄像头,所述安装座的六个侧面上侧分别安装设有视频采集摄像头,所述安装座的六个侧面下侧分别安装设有视频抓拍摄像头。本技术与现有技术相比优点在于:通过六个视频采集摄像头和六个视频抓拍摄像头的作用,能够完成360度采集环境画面,同时在云台摄像头的作用下,能够同步360度实时自主追踪物体。
技术研发人员:高毅,张自超,宋杰
受保护的技术使用者:上海萌臣信息技术有限公司
技术研发日:20210816
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!