水下无线通信网络
水下无线通信网络
1.相关申请的交叉引用
2.本技术要求于2020年5月12日提交的题为“underwater wireless sensor network and method based on optical wireless communication technology”的美国临时专利申请no.63/023,458的优先权,其公开内容通过引用全部并入本文。
3.背景
技术领域
4.所公开主题的实施例总体上涉及一种使用自供电水下传感器节点之间的光通信来收集传感器数据的自主水下无线通信网络。
背景技术:
5.近年来,用于海洋环境监测、近海勘探、海啸预警等方面的水下无线传感器网络的研究和发展受到了极大的关注。这些水下无线传感器网络通常包括形成自组织网络并使用声学通信进行通信的大量的水下传感器节点,声学通信是水下通信中最成熟的技术。水下声学通信存在许多缺陷。首先,因为传播的声波可能会受到水中层状介质的折射以及海面和海床的反射的影响,因此声学信号会受到显著的多径效应。其次,水声具有慢的传播速度(~1500m/s)和毫秒级的大的传输延迟。此外,声波在水中的传播速度随盐度、温度和压力(取决于深度)而变化,这可能导致传输延迟的动态变化。第三,由于多径效应、传输延迟、背景噪声和各种动态因素(例如,内波在水面上的波),接收到的声学信号的幅度和相位容易失真,这会导致符号间干扰并导致高的误码率。第四,因为通信频率越高,声波的吸收损耗越大,因此水下声学通信的带宽有限。尽管在小于100m的距离处可以实现100khz的带宽,但在1km至10km的传输距离处带宽通常小于10khz。
6.鉴于水下声学通信的各种问题,参考文献[1]公开了一种水下多跳通信网络,该水下多跳通信网络使用光收发器进行节点之间的通信和识别邻近节点。多跳通信网络是采用时分多址(tdma)介质访问控制(mac)协议的自组织网络。tdma mac协议要求将时隙分配到不同的节点,以避免两个或更多个节点传输相互干扰。替代地,tdma mac协议可以允许多个节点尝试在特定时隙中进行通信,并提供竞争解决机制来处理试图在特定时隙中进行通信的两个节点之间的干扰通信。因此,tdma mac协议为节点引入了额外的处理量。由于节点由电池或燃料电池供电,这种额外的处理量增加了每个节点的电力负载,因此需要较频繁地访问水下节点以更换电池或为燃料电池补充燃料。
[0007]
因此,需要一种使用不会遇到与声学通信类似的限制的无线通信形式的水下通信网络。
技术实现要素:
[0008]
根据实施例,存在一种水下无线通信网络,其包括漂浮在水体表面处并且包括射频通信收发器和有线通信收发器的第一浮式平台。第一水下传感器节点通过至少一根导线
耦合到第一浮式平台,第一浮式平台和第一水下传感器节点通过所述至少一根导线进行通信。第一水下传感器包括有线通信收发器,以通过至少一根导线与第一浮式平台进行通信。第一浮式平台或第一水下传感器节点包括被配置为向第一浮式平台或第一水下传感器节点供电的第一环境能量收集器。第二水下传感器节点设置在水体下方并且包括被配置为向第二水下传感器节点供电的第二环境能量收集器。第一水下传感器节点和第二水下传感器节点各自包括传感器、光通信收发器和声学定位系统。
[0009]
根据实施例,存在一种用于使用水下无线通信网络进行通信的方法。声学定位系统用于确定第一水下传感器节点在第二水下传感器节点的光通信范围内。响应于确定第一水下传感器节点在第二水下传感器节点的光通信范围内,在第一水下传感器节点的第一光收发器与第二水下传感器节点的第二光收发器之间建立光通信连接。由第二水下传感器节点的第二传感器收集的传感器数据通过所建立的光通信连接传输到第一水下传感器节点。第一水下传感器节点使用第一水下传感器节点的有线收发器和漂浮在水体表面处的第一浮式平台的有线收发器,通过有线连接,将由第一水下传感器节点的第一传感器收集的传感器数据和由第二传感器节点收集的传感器数据传输到第一浮式平台。第一浮式平台的射频收发器将由第一传感器和第二传感器收集的传感器数据传输到陆基射频基站。
[0010]
根据实施例,存在一种用于使用包括第一和第二水下传感器节点的水下无线通信网络进行通信的方法,所述第一和第二水下传感器节点分别包括第一和第二光收发器。水下运载工具的声学定位系统用于确定水下运载工具在第二传感器节点的光通信范围内。响应于确定第二水下传感器节点在水下运载工具的光通信范围内,在第二水下传感器节点的第二光收发器与水下运载工具的光收发器之间建立光通信连接。由第二水下传感器节点的第二传感器收集的传感器数据通过所建立的光通信连接传输到水下运载工具。水下运载工具的声学定位系统用于确定水下运载工具在第一水下传感器节点的光通信范围内。响应于确定水下运载工具在第一水下传感器节点的光通信范围内,在第一水下传感器节点的第一光收发器与水下运载工具的光收发器之间建立光通信连接。水下运载工具通过所建立的光通信连接将第二水下传感器节点的第二传感器采集的传感器数据传输到第一水下传感器节点。第一水下传感器节点使用第一水下传感器节点的有线收发器和漂浮在水体表面处的第一浮式平台的有线收发器,通过有线连接,将由第一传感器节点的第一传感器收集的传感器数据和第二传感器节点收集的传感器数据传输到第一浮式平台。第一浮式平台的射频收发器将由第一传感器和第二传感器收集的传感器数据传输到陆基射频基站。
附图说明
[0011]
包含在说明书中并构成说明书一部分的附图示出了一个或更多个实施例,并且与描述一起解释了这些实施例。在附图中:
[0012]
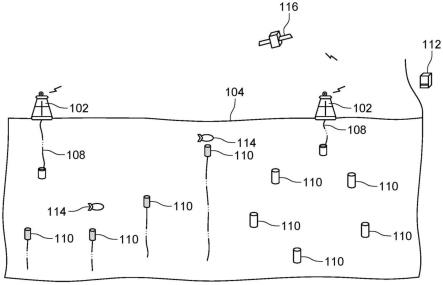
图1a-1d是根据实施例的水下无线通信网络的示意图;
[0013]
图2a是根据实施例的浮式平台的框图;
[0014]
图2b是根据实施例的第一水下传感器节点的框图;
[0015]
图2c是根据实施例的第二水下传感器节点的框图;
[0016]
图2d是根据实施例的水下运载工具的框图;
[0017]
图2e是根据实施例的水下传感器节点的另一框图;和
[0018]
图3a、3b、4a和4b是用于使用水下无线通信网络进行通信的方法的流程图。
具体实施方式
[0019]
示例性实施例的以下描述参考附图。不同附图中相同的附图标记表示相同或相似的元件。以下详细描述不限制本发明。相反,本发明的范围由所附权利要求限定。为了简单起见,以下实施例是关于使用节点之间的光通信的无线水下通信网络的术语和结构来讨论的。
[0020]
在整个说明书中对“一个实施例”或“实施例”的引用意味着结合实施例描述的特定特征、结构或特性被包括在所公开主题的至少一个实施例中。因此,在整个说明书的各处出现的短语“在一个实施例中”或“在实施例中”并不一定是指同一实施例。此外,在一个或更多个实施例中,特定特征、结构或特性可以以任何合适的方式组合。
[0021]
图1a-1d和图2a-2d示出水下无线通信网络和这种网络的部件。水下无线通信网络包括漂浮在水体104的表面处并且包括射频通信收发器202和有线通信收发器204的第一浮式平台102。该网络还包括第一水下传感器节点106,其通过至少一根导线108耦合到第一浮式平台102导线,第一浮式平台102和第一水下传感器节点106通过所述至少一根导线进行通信。第一水下传感器106包括通过至少一根导线108与第一浮式平台102进行通信的有线通信收发器204。第一浮式平台102或第一水下传感器节点106包括第一环境能量收集器208,其被配置为向第一浮式平台102和/或第一水下传感器节点106供电。该网络还包括在水体104下的第二水下传感器节点110,并且包括被配置为向该第二水下传感器节点110供电的第二环境能量收集器208。第一106和第二110水下传感器节点各自包括传感器210、光通信收发器206和声学定位系统212。
[0022]
如图1a-1d所示,第一浮式平台102能够使用射频通信收发器202与陆基射频基站112直接通信或通过通信卫星116进行通信。射频收发器202可以采用任何类型的无线通信频率和任何类型无线通信协议。
[0023]
具体参考图1a,该水下无线通信网络包括一个第一水下无线通信传感器节点106和多个第二水下传感器节点110,一个第一水下无线通信传感器节点106耦合到一个第一浮式平台102。多个第二水下传感器节点110能够设置在水104下的相同或不同深度处。在图1a中的节点110被部署为根据洋流移动的浮动协作节点(即,在本领域中有时称为群节点),而图1b中的节点110是用于永久参数监测的锚定节点。在图1a的网络中,在第一水下传感器节点102的光通信范围内的任何第二水下传感器节点110都能够彼此直接通信,例如,向第一传感器节点发送传感器数据以及向第二水下传感器节点110传输控制数据。如果第二水下传感器节点110中只有一个在第一水下传感器节点的光通信范围内,或者如果希望当第二水下传感器节点110中的不止一个在第一水下传感器节点106的光通信范围内时实现,第二传感器节点110能够在光通信范围内传输到第二传感器节点110中的另一个,这能够重复直到通信被传输到第一水下传感器节点106。如本文所使用的,在光通信范围内应理解为足够近,使得有足够的带宽来在网络内传输传感器数据和控制数据。因此,即使光束能够到达水下传感器节点中的另一个,如果通信连接的带宽不足以传输传感器数据和控制数据,则两个水下传感器节点不在彼此的光通信范围内。各种公开的部件能够采用与水下无线通信网络的公开操作一致的任何类型的通信和路由协议。
[0024]
现在参见图1b,该网络使用一个或更多个水下运载工具114来传递第一水下传感器节点106与任何一个或更多个第二水下传感器节点110之间的通信。第二水下传感器节点110固定在水体104的底层并且可以设置在相同或不同深度处。水下运载工具114可以是载人的、自主的或遥控的水下运载工具,或者作为群节点协作。水下运载工具的非限制性示例是水下滑翔机。在该网络中传感器数据的收集(即,由传感器读取或测量)能够以几种不同的方式执行。第二水下传感器节点110能够将传感器数据传输到第二传感器节点110中在光通信范围内的另一个。例如,第二水下传感器节点110之一能够从其他第二水下传感器节点110中的一个或更多个收集传感器数据,这些数据能够使用直接传输来收集或从第二水下传感器节点110之一传递到另一个节点,直到指定的第二水下传感器节点110接收到收集的传感器数据。水下运载工具能够周期性地在指定的水下传感器节点110之间行进以获得收集的传感器数据,然后行进到第一水下传感器节点106,从而传输收集的传感器数据。这能够涉及例如自主水下运载工具114,其沿着第一水下传感器节点和第二水下传感器节点之间的限定路径收集传感器数据以及分配控制数据。
[0025]
图1b所示的网络包括多个水下运载工具114。在这种情况下,图左下方的水下运载工具114能够从图的左侧的三个第二水下传感器节点收集传感器数据,图的中间的水下运载工具能够从图的右侧的两个第二水下传感器节点110收集传感器数据,然后这两个水下运载工具114能够将收集的传感器数据传递给在图中最上面的水下运载工具114,其然后将收集的传感器数据从两个水下运载工具114(和五个第二水下传感器节点110)传递到第一水下传感器节点106。此外,控制数据可以从陆基射频基站112传输,可以使用上述路由沿相反方向分配所述控制数据。
[0026]
尽管图1b示出了多个水下运载工具,但是根据水下无线通信网络的规模和网络可容忍的通信延迟,网络可以用较多或较少的水下运载工具来实现。通信延迟越短,所需的水下运载工具就越少。
[0027]
现在参见图1c,该网络包括多个第一浮式平台102和多个第一水下传感器节点106,以及一个或更多个水下运载工具114。在该网络中,水下运载工具从一个或更多个第一水下传感器节点106收集传感器数据,然后将收集的传感器数据传输到第一水下传感器节点106中被指定为阱结点的的特定一个,其然后将收集的传感器数据提供给相关联的第一浮式平台102,第一浮式平台102然后使用射频通信将收集的传感器数据直接或通过卫星116传输到陆基射频基站112。控制数据的通信能够遵循相反的路径。
[0028]
该网络可以被实现为使得浮式平台中只有一个是具有射频收发器202和有线通信收发器204的第一浮式平台102,而其余的浮式平台不具有这些收发器。在这种情况下,具有射频收发器202的第一浮式平台102可以是从不具有射频收发器202的其他第一浮式平台收集传感器数据并与陆基射频基站112进行通信的阱结点。替代地,多于一个或所有的浮式平台可以包括射频收发器202和有线通信收发器204,并且阱结点可以保持不变或改变。例如,当卫星116被用于与陆基射频基站112进行通信时,这可能是有利的,因为根据卫星116和第一浮式平台102的相对位置,它允许第一浮式平台中的不同平台与卫星进行通信。应该认识到,术语卫星应理解为能够传递通信的任何机载设备或系统,其可以在地球大气层之内或之外,并且可以包括不止一个卫星。
[0029]
图1d示出了图1a-1c的网络能够如何组合。因此,类似于以上结合图1b和图1c的讨
论,该图左侧所示的第二传感器节点110采用水下运载工具114在第一水下传感器节点102与多个第二水下传感器节点110之间传递通信,而类似于以上结合图1a的讨论,该图右侧的第二传感器节点110彼此进行通信,直到第二传感器节点110中的一个或更多个将通信传递到第一水下传感器节点106(或从第一水下传感器节点106接收通信)。
[0030]
图2a是根据实施例的第一浮式平台102的框图。如图所示,第一浮式平台102包括耦合到有线通信收发器204的射频收发器202。第一浮式平台102还可以包括环境能量收集设备208。
[0031]
图2b是根据实施例的第一水下传感器节点106的框图。第一水下传感器节点106包括耦合到光通信收发器206的有线收发器204。第一水下传感器节点106还包括耦合到有线收发器204的传感器210和耦合到光通信收发器206的声学定位系统212。第一水下传感器节点106还可以包括耦合到收发器204和206以及传感器210和声学定位系统212的环境能量收集设备208。如果第一水下传感器节点106不包括环境能量收集设备208,则收发器204和206、传感器210和声学定位系统212耦合到来自第一浮式平台102的电力线。在一个实施方式中,第一水下传感器节点106的除传感器210之外的部件能够包含在密封桶中,传感器210设置在第一水下传感器节点106的外部,使得它能够测量水中的参数。
[0032]
图2c是根据实施例的第二水下传感器节点110的框图。第二水下传感器节点110包括耦合到传感器210和声学定位系统212的光通信收发器206。环境能量收集器208耦合到光通信收发器206、传感器210和声学定位系统212。在一种实施方式中,第二水下传感器节点110的除传感器210之外的部件能够包含在密封桶中,传感器210设置在第二水下传感器节点110的外部,使得它能够测量水中的参数。
[0033]
图2d是根据实施例的水下运载工具114的框图。水下运载工具114包括耦合到环境能量收集器208和声学定位系统212的光通信收发器206。环境能量收集器208还耦合到驱动器214,驱动器214使水下运载工具114在水中移动。驱动器214能够是用于在水下行进的任何类型的驱动器。
[0034]
为了便于讨论,共同的附图标记用于指代第一浮式平台102、第一水下传感器节点106、第二水下传感器节点110和水下运载工具114中的相似部件,因为这些部件在第一浮式平台102、第一水下传感器节点106、第二水下传感器节点110和水下运载工具114中执行相似的功能。然而,这些相似的部件不必是相同的部件。例如,与水下传感器节点中的光通信收发器相比,水下运载工具114的光通信收发器206能够采用较大功率或提供对光通信信号的较复杂的处理。
[0035]
射频通信收发器202能够是能够使用射频与卫星116或陆基射频基站112进行通信的任何类型的射频通信收发器202。有线通信收发器204能够是能够有线通信的任何类型的收发器。光通信收发器206能够是能够光通信的任何类型的收发器。环境能量收集设备208能够是能够收集环境能量的任何类型的设备,例如用于收集太阳能的太阳能板,或用于收集潮汐能或波浪能的设备。此外,环境能量收集设备能够是光电能量转换器,该光电能量转换器被配置为将来自与网络的其他元件进行光通信的光能转换成电能以向特定元件供电。例如,水下运载工具114能够将光束发射到第一106或第二110水下传感器节点之一,接收光束唤醒传感器节点,然后传感器节点将光束的一部分转换成电能用于传感器节点的运行。
[0036]
传感器210能够感测一个或更多个参数,包括但不限于水温、盐度、溶解氧浓度、氨
氮浓度、光强度、ph值等。每个第一106或第二110水下传感器节点能够包括这些类型或类似的传感器中的一个或更多个。应当认识到,第一106或第二110水下传感器节点中的不同节点能够包括不同的传感器或者能够包括相同的传感器。声学定位系统212能够是任何类型的声学定位系统,因为这样的系统在本领域中是众所周知的。
[0037]
尽管没有具体示出,但第一浮式平台102、第一水下传感器节点106、第二水下传感器节点110和水下运载工具114能够包括用于存储能量的充电式电池,以及用于特定网络元件的控制操作的处理器和存储器。处理器能够是任何类型的处理器,包括微处理器、现场可编程门阵列(fpga)或专用集成电路(asic)。存储器能够是能够存储传感器数据和用于操作特定网络元件的计算机可读指令的任何类型的存储器。
[0038]
图2e是根据实施例的第一水下传感器节点106或第二水下传感器节点110的另一框图。如图所示,一个或更多个传感器和环境能量收集器设置在包括其余部件的密封桶的外部。然而,应该认识到,在某些实施方式中,例如当水下传感器节点由来自网络中的另一部件的入射光学器件供电时(下面将更详细地描述),环境能量收集器能够设置在密封桶的内部。此外,第一环境能量收集器和第二环境能量收集器的外壳不必是桶形的而是能够具有任何需要的形状。
[0039]
在图2e中,放大器执行信号放大,滤波器去除信号噪声,模数(a/d)和数模(d/a)转换器在模拟和数字之间转换信号。微处理器控制单元(mcu)能够是任何类型的处理器,包括微处理器、现场可编程门阵列(fpga)、专用集成电路(asic)等。此外,mcu包括一个或更多个存储器,用于存储传输之前的传感器数据和用于存储用于操作水下传感器节点的计算机可读指令,其包括监测电池电量。充电式电池耦合到环境能量收集器以提取电能并将收集的电能分配到图2e中所示的各种部件。
[0040]
来自一个或更多个传感器的传感器数据通过放大器1、滤波器1和a/d转换器1,然后传递到mcu。mcu处理传感器数据(例如数字信号调制),然后将所处理的传感器数据传递给d/a转换器,d/a转换器然后将模拟信号传递给放大器2。放大器2将模拟信号传递给驱动器,驱动器控制光源使得其在线性范围内运行,并且将代表传感器数据的模拟电信号调制到光源产生的光束上。光源是用于调制光束的信号发射器。提供了两个不同尺寸的透镜(透镜1和透镜2),它们允许调整发射的和接收到的光斑的大小。尽管图示了两个透镜,但水下传感器节点能够包括更多或更少的透镜。
[0041]
光电探测器通过透镜之一接收入射光束,光电探测器将接收到的光束转换成代表用于水下传感器节点的控制数据的电信号。控制数据由放大器3放大,由滤波器2滤波,由a/d 2转换成数字信号,然后提供给mcu处理。控制数据能够改变水下传感器节点的操作,如调整传感器的操作、调整水下传感器节点的深度等。
[0042]
现在将参考图1a-1d和图2a-2d,结合图3a和3b描述一种用于使用水下无线通信网络进行通信的方法。首先参见图3a,声学定位系统212用于确定第一水下传感器节点106在第二水下传感器节点110的光通信范围内(步骤305)。响应于确定第一水下传感器节点106在第二水下传感器节点110的光通信范围内,在第一水下传感器节点106的第一光收发器206与第二水下传感器节点110的第二光收发器206之间建立光通信连接(步骤310)。
[0043]
由第二水下传感器节点110的第二传感器210收集的传感器数据通过所建立的光通信连接发送到第一水下传感器节点106(步骤315)。第一水下传感器节点106使用第一水
下传感器节点106的有线收发器204和漂浮在水体104的表面处的第一浮式平台102的有线收发器204,通过有线连接108,将由第一水下传感器节点106的第一传感器210收集的传感器数据和由第二传感器节点110收集的传感器数据传输到第一浮式平台102(步骤320)。第一浮式平台102的射频收发器202将由第一传感器和第二传感器210收集的传感器数据传输到陆基射频基站112(步骤325)。
[0044]
现在将结合图3b描述从陆基射频通信网络112到第二水下传感器节点110的数据通信。第一浮式平台102从陆基射频基站112接收用于第二水下传感器节点110的控制数据(步骤330)。第一浮式平台102的有线收发器204将控制数据传输到第一水下传感器节点106的有线收发器204(步骤335)。声学定位系统212用于确定第一水下传感器节点106在第二水下传感器节点110的光通信范围内(步骤340)。响应于确定第一水下传感器节点106在第二水下传感器节点110的光通信范围内,在第一水下传感器节点106与第二水下传感器节点110之间建立另一光通信连接(步骤345)。
[0045]
第一水下传感器节点106通过所建立的另一光通信连接将控制数据传输到第二水下传感器节点110(步骤350)。第二水下传感器节点110处理控制数据并基于所处理的控制数据来调整第二水下传感器节点110的操作(步骤355)。
[0046]
现在将参考图1a-1d和图2a-2d,结合图4a和4b描述一种用于使用水下无线通信网络进行通信的方法。水下无线通信网络包括第一106和第二110水下传感器节点,所述节点106和110各自包括第一光收发器和第二光收发器206。首先参见图4a,水下运载工具114的声学定位系统212用于确定水下运载工具114在第二传感器节点110的光通信范围内(步骤405)。响应于确定第二水下传感器节点110在水下运载工具114的光通信范围内,在第二水下传感器节点110的第二光收发器206与水下运载工具114的光收发器206之间建立光通信连接(步骤410)。由第二水下传感器节点110的第二传感器210收集的传感器数据通过所建立的光通信连接传输到水下运载工具114(步骤415)。
[0047]
水下运载工具114的声学定位系统212用于确定水下运载工具114在第一水下传感器节点106的光通信范围内(步骤420)。这能够在水下运载工具114从第二水下传感器节点110的光通信范围内的位置移动到第一水下传感器节点106的光通信范围内的位置之后发生,或者水下运载工具能够定位成使得其在第一水下传感器节点106和第二水下传感器节点110的光通信范围内。
[0048]
响应于确定水下运载工具114在第一水下传感器节点106的光通信范围内,在第一水下传感器节点106的第一光收发器206与水下运载工具114的光收发器206之间建立光通信连接(步骤425)。水下运载工具114通过所建立的光通信连接将由第二水下传感器节点110的第二传感器210收集的传感器数据传输到第一水下传感器节点106(步骤430)。
[0049]
第一水下传感器节点106使用第一水下传感器节点106的有线收发器204和漂浮在水体104表面处的第一浮式平台102的有线收发器204,通过有线连接108,将由第一传感器节点106的第一传感器210收集的传感器数据和由第二传感器节点110收集的传感器数据传输到第一浮式平台102(步骤435)。第一浮式平台102的射频收发器202将由第一传感器和第二传感器210收集的传感器数据传输到陆基射频基站112(步骤440)。
[0050]
现在将结合图4b描述从陆基射频通信网络112到第二水下传感器节点110的数据通信。第一浮式平台106从陆基射频基站112接收用于第二水下传感器节点110的控制数据
(步骤445)。第一浮式平台102的有线收发器204将控制数据传输到第一水下传感器节点106的有线收发器204(步骤450)。水下运载工具114的声学定位系统212用于确定水下运载工具114在第一水下传感器节点106的光通信范围内(步骤455)。响应于确定水下运载工具114在第一水下传感器节点106的光通信范围内,在第一水下传感器节点106与水下运载工具114之间建立另一光通信连接(步骤460)。第一水下传感器节点106通过所建立的另一光通信连接将控制数据传输到水下运载工具114(步骤465)。
[0051]
水下运载工具114的声学定位系统212用于确定水下运载工具114在第二传感器节点110的光通信范围内(步骤470)。响应于确定水下运载工具114在第二水下传感器节点110的光通信范围内,在第二水下传感器节点110的第二光收发器206与水下运载工具114的光收发器206之间建立另一光通信连接(步骤475)。控制数据通过所建立的另一光通信连接从水下运载工具114传输到第二水下传感器节点110(步骤480)。第二水下传感器节点110处理控制数据并基于所处理的控制数据调整第二水下传感器节点110的运行(步骤485)。
[0052]
因为在一些实施例中,网络能够完全自主地运行以从水下传感器节点收集传感器数据并将所收集的传感器数据从水中传输到陆地,因此所公开的水下无线通信网络是特别有利的。此外,除了陆地上的操作员可以指定针对水下传感器节点的控制数据之外,控制数据的传输和分配还能够完全自主地执行。水下无线通信网络结合水基部件(即浮式平台、水下传感器节点和水下运载工具)的自供电完全自主运行的能力提供了一种水下无线通信网络,该水下无线通信网络能够被部署并且无需额外访问水基部件以向水基部件提供额外的电力(例如,新电池或为充电式现有电池),或如上所述,能够从陆地远程执行用于调整水基部件的运行。这在水下无线通信网络远离陆地或部署在虽然相对靠近陆地但仍位于难以到达的区域中的情况下是特别有利的。
[0053]
所公开的实施例提供了一种水下无线通信系统,该水下无线通信系统使用光通信以在节点之间进行通信,并使用声学定位来控制何时在节点之间交换通信。应当理解,该描述并非旨在限制本发明。相反,示例性实施例旨在覆盖包括在由所附权利要求限定的本发明的精神和范围内的替代、修改和等效物。此外,在示例性实施例的详细描述中,阐述了许多具体细节以便提供对要求保护的发明的全面理解。然而,本领域技术人员将理解,可以在没有这些具体细节的情况下实践各种实施例。
[0054]
尽管本示例性实施例的特征和元素在实施例中以特定的组合进行了描述,但是每个特征或元素能够在不具有实施例的其他特征和元素的情况下单独使用,或者与在具有或不具有本文所公开的其他特征和元素的各种组合中使用。
[0055]
该书面描述使用所公开的主题的示例以使本领域的任何技术人员能够实践所公开的主题,包括制造和使用任何设备或系统以及执行任何结合的方法。本主题的专利范围由权利要求限定,并且可以包括本领域技术人员想到的其他示例。此类其他示例旨在位于权利要求的范围内。
[0056]
参考文献
[0057]
[1]2016年5月12日公布的美国专利申请公开no.2016/0134433。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1