物体检测系统及物体检测方法与流程
本公开涉及一种物体检测系统和物体检测方法。
背景技术:
1、挖掘机、推土机等施工机械(也包括重型机械)、叉车、汽车等车辆成为驾驶员驾驶的驾驶目标(驾驶目标机械)。在这些驾驶目标中,开发出了具有检测挖掘机周围的人或物等物体的传感器的挖掘机(例如参照专利文献1)。
2、引用列表
3、专利文献
4、专利文献1:jp 2018-197491 a
技术实现思路
1、技术问题
2、然而,驾驶员难以视觉识别处于这种驾驶目标的盲点位置处的物体(例如,人、动物、障碍物等),并且驾驶目标周围的人也难以领会该人处于驾驶目标的盲点处。因此,希望将物体对驾驶目标处于盲点位置通知给驾驶员及围绕其周围中的两者或者其中一者。
3、因此,本公开提出了一种物体检测系统和物体检测方法,物体检测系统和物体检测方法被配置为将物体对驾驶目标处于盲点位置通知给驾驶员和围绕其周围中的两者或者其中一者。
4、问题的解决方案
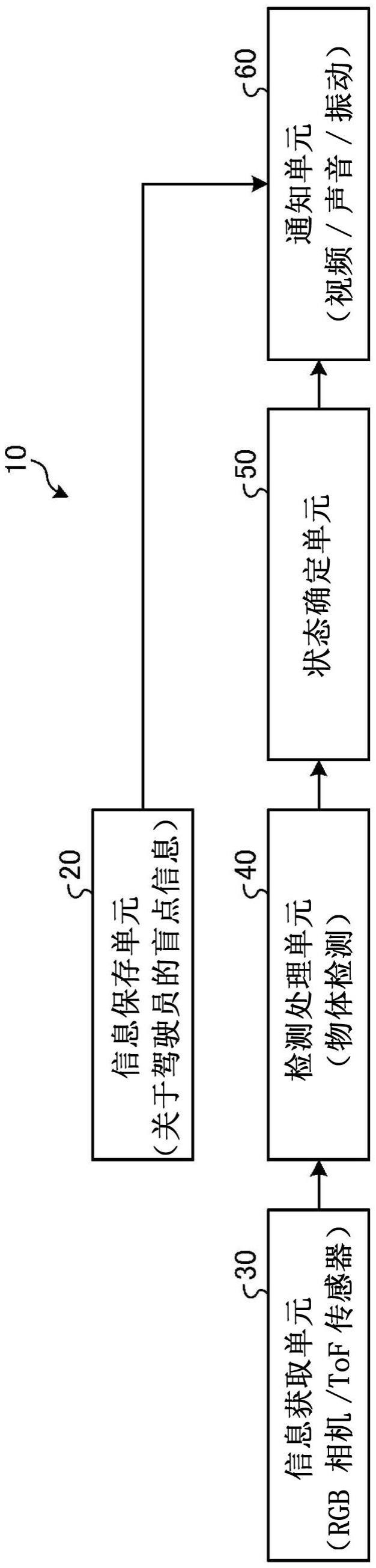
5、根据本公开的实施例的物体检测系统包括:信息保存单元,保存关于作为驾驶目标的盲点的盲点区域的盲点信息,驾驶目标是施工机械或车辆;信息获取单元,获取关于驾驶目标的周围状况的周围状况信息;检测处理单元,基于周围状况信息检测物体;状态确定单元,基于检测出的物体的位置信息和盲点信息确定物体处于危险状态,其中,物体处于盲点区域中;以及通知单元,根据物体处于危险状态的确定结果,将物体处于危险状态通知给驾驶驾驶目标的驾驶员和围绕驾驶目标的周围中的两者或其中一者。
6、根据本公开的实施例的物体检测方法包括:保存关于作为驾驶目标的盲点的盲点区域的盲点信息,驾驶目标是施工机械或车辆;获取驾驶目标的周围状况的周围状况信息;基于周围状况信息检测物体;基于检测出的物体的位置信息和盲点信息确定物体处于危险状态,其中,物体处于盲点区域中;以及根据物体处于危险状态的确定结果,将物体处于危险状态通知给驾驶驾驶目标的驾驶员和围绕驾驶目标的周围中的两者或其中一者。
技术特征:
1.一种物体检测系统,包括:
2.根据权利要求1所述的物体检测系统,其中,
3.根据权利要求1所述的物体检测系统,其中,
4.根据权利要求1所述的物体检测系统,其中,
5.根据权利要求1所述的物体检测系统,其中,
6.根据权利要求1所述的物体检测系统,进一步包括:
7.根据权利要求6所述的物体检测系统,其中,
8.根据权利要求7所述的物体检测系统,其中,
9.根据权利要求7所述的物体检测系统,其中,
10.根据权利要求6所述的物体检测系统,其中,
11.根据权利要求6所述的物体检测系统,其中,
12.根据权利要求11所述的物体检测系统,进一步包括:
13.根据权利要求1所述的物体检测系统,进一步包括:
14.根据权利要求13所述的物体检测系统,其中,
15.根据权利要求1所述的物体检测系统,进一步包括:
16.根据权利要求15所述的物体检测系统,其中,
17.根据权利要求15所述的物体检测系统,进一步包括:
18.根据权利要求1所述的物体检测系统,进一步包括:
19.根据权利要求1所述的物体检测系统,进一步包括:
20.一种物体检测方法,包括:
技术总结
根据本公开的一个实施方式的物体检测系统(10)包括:信息保存单元(20),保存关于构成操作对象的盲点的盲点区域的盲点信息,操作对象是施工机械或车辆;信息获取单元(30),获取关于操作对象的周围状况的周围状况信息;检测处理单元(40),基于周围状况信息来检测物体;状态确定单元(50),基于盲点信息和检测的物体的位置信息确定物体处于出现在盲点区域中的危险状态;以及通知单元(60),根据物体处于危险状态的确定结果,将指示物体处于危险状态的通知发布给操作操作对象的操作者和/或操作对象的周围。
技术研发人员:一色昭寿
受保护的技术使用者:索尼半导体解决方案公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!