控制器六自由度画面的生成方法、装置、设备及存储介质与流程
本公开涉及人工智能,尤其涉及一种控制器六自由度画面的生成方法、装置、计算机设备及存储介质。
背景技术:
1、一些简易控制器可以配合虚拟现实设备,为用户带来非常丰富的视觉体验。控制器的位置和姿态信息是生成控制器六自由度显示画面的必备条件。
2、这种简易控制器中,通常内置有陀螺仪可以测量控制器的姿态,从而实现虚拟现实设备对控制器三自由度的显示画面,而如果需要满足用户六自由度的使用需求,则可以通过在控制器中再布置位置传感器获取控制器的位移,进而实现能体现控制器六自由度的显示画面。
3、然而由于位置传感器比较耗电,会导致控制器的续航时间减少。因而,如何在控制器不包含位置传感器的情况下,实现能体现控制器六自由度的画面是当前需要解决的问题。
技术实现思路
1、本公开旨在至少在一定程度上解决相关技术中的技术问题之一。
2、本公开第一方面实施例提出了一种控制器六自由度画面的生成方法,包括:
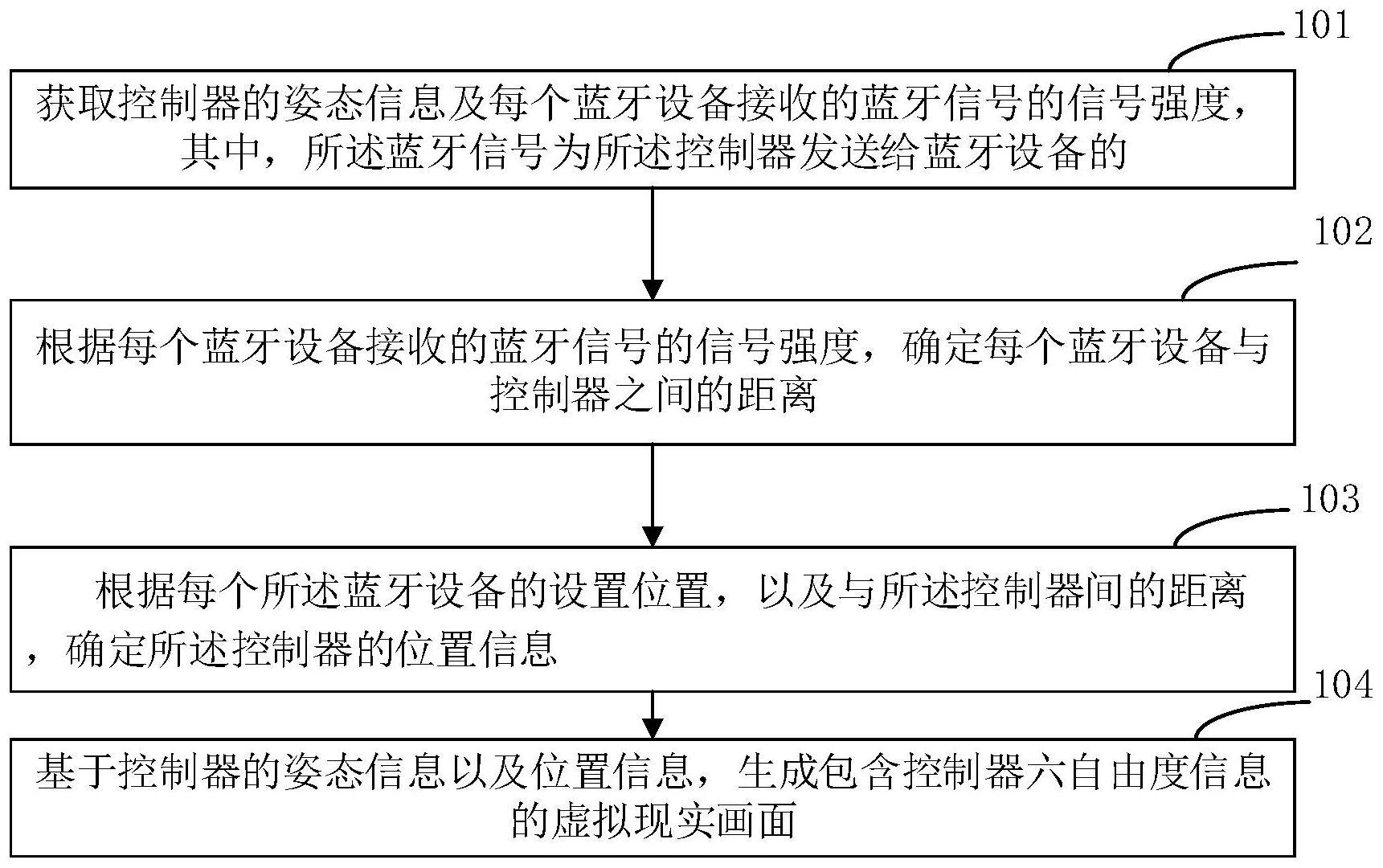
3、获取控制器的姿态信息及每个蓝牙设备接收的蓝牙信号的信号强度,其中,所述蓝牙信号为所述控制器发送给蓝牙设备的;
4、根据每个所述蓝牙设备接收的蓝牙信号的信号强度,确定每个所述蓝牙设备与所述控制器之间的距离;
5、根据每个所述蓝牙设备的设置位置,以及与所述控制器间的距离,确定所述控制器的位置信息;
6、基于所述控制器的姿态信息以及所述位置信息,生成包含所述控制器六自由度信息的虚拟现实画面。
7、本公开第二方面实施例提出了一种控制器六自由度画面的生成方法,包括:
8、接收控制器发送的蓝牙信号;
9、对所述蓝牙信号进行处理,以确定所述蓝牙信号的信号强度以及所述控制器的姿态信息;
10、将所述信号强度以及所述姿态信息发送给车机。
11、本公开第三方面实施例提出了一种控制器六自由度画面的生成方法,包括:
12、响应于控制器上的指定触点被触发,向车机发送检测信号,以使所述车机启动各个蓝牙设备;
13、基于预设的姿态传感器,获取所述控制器当前的姿态信息;
14、发送蓝牙信号,其中,所述蓝牙信号中包含了所述控制器当前的姿态信息。
15、本公开第四方面实施例提出了一种控制器六自由度画面的生成装置,包括:
16、获取模块,用于获取控制器的姿态信息及每个蓝牙设备接收的蓝牙信号的信号强度,其中,所述蓝牙信号为所述控制器发送给蓝牙设备的;
17、第一确定模块,用于根据每个所述蓝牙设备接收的蓝牙信号的信号强度,确定每个所述蓝牙设备与所述控制器之间的距离;
18、第二确定模块,用于根据每个所述蓝牙设备的设置位置,以及与所述控制器间的距离,确定所述控制器的位置信息;
19、生成模块,用于基于所述控制器的姿态信息以及所述位置信息,生成包含所述控制器六自由度信息的虚拟现实画面。
20、本公开第五方面实施例提出了一种控制器六自由度画面的生成装置,包括:
21、接收模块,用于接收控制器发送的蓝牙信号;
22、第三确定模块,用于对所述蓝牙信号进行处理,以确定所述蓝牙信号的信号强度以及所述控制器的姿态信息;
23、第一发送模块,用于将所述信号强度以及所述姿态信息发送给车机。
24、本公开第六方面实施例提出了一种控制器六自由度画面的生成装置,包括:
25、启动模块,用于响应于控制器上的指定触点被触发,向车机发送检测信号,以使所述车机启动各个蓝牙设备;
26、获得模块,用于基于预设的姿态传感器,获取所述控制器当前的姿态信息;
27、第二发送模块,用于发送蓝牙信号,其中,所述蓝牙信号中包含了所述控制器当前的姿态信息。
28、本公开第七方面实施例提出了一种计算机设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,实现如本公开第一方面和/或第二方面实施例提出的控制器六自由度画面的生成方法。
29、本公开第八方面实施例提出了一种非临时性计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现如本公开第一方面和/或第二方面实施例提出的控制器六自由度画面的生成方法。
30、本公开第一方面提供的控制器六自由度画面的生成方法、装置、计算机设备及存储介质,存在如下有益效果:
31、本公开实施例中,首先获取控制器的姿态信息及每个蓝牙设备接收的蓝牙信号的信号强度,其中,所述蓝牙信号为所述控制器发送给蓝牙设备的,之后根据每个所述蓝牙设备接收的蓝牙信号的信号强度,确定每个所述蓝牙设备与所述控制器之间的距离,然后根据每个所述蓝牙设备的设置位置,以及与所述控制器间的距离,确定所述控制器的位置信息,之后基于所述控制器的姿态信息以及所述位置信息,生成包含所述控制器六自由度信息的虚拟现实画面。由此,仅需在控制器中布置基础通信的蓝牙模块即可,无需其他定位手段的补充,降低了开发难度,同时也降低了成本,且由于在未使用位置传感器的情况下进行定位,提高了控制器的续航能力。
32、本公开第二方面提供的控制器六自由度画面的生成方法、装置、计算机设备及存储介质,存在如下有益效果:
33、本公开实施例中,蓝牙设备首先接收控制器发送的蓝牙信号,之后对蓝牙信号进行处理,以确定蓝牙信号的信号强度以及控制器的姿态信息,最后将信号强度以及姿态信息发送给车机。由此,蓝牙设备可以计算得出信号强度,并解析出姿态信息,之后可以发送给车机,以使车机对控制器的坐标进行计算。
34、本公开第三方面提供的控制器六自由度画面的生成方法、装置、计算机设备及存储介质,存在如下有益效果:
35、本公开实施例中,控制器首先响应于控制器上的指定触点被触发,向车机发送检测信号,以使所述车机启动各个蓝牙设备,然后基于预设的姿态传感器,获取所述控制器当前的姿态信息,最后发送蓝牙信号,其中,所述蓝牙信号中包含了所述控制器当前的姿态信息。由此,可以在控制器脱离了虚拟现实设备的情况下,且指定的触点被触发时,使得车机启动蓝牙设备,并发送蓝牙信号,发送姿态信息,从而蓝牙设备可以接收到姿态信息。
36、本公开附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
技术特征:
1.一种控制器六自由度画面的生成方法,其特征在于,所述方法由车机执行,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在所述获取控制器的姿态信息及每个蓝牙设备接收的蓝牙信号的信号强度之前,还包括:
3.根据权利要求1所述的方法,其特征在于,所述车机中包含蓝牙装置,所述蓝牙设备至少为两个,且所述至少两个蓝牙设备的设置位置与所述车机的位置不共线;
4.如权利要求1-3任一所述的方法,其特征在于,所述获取控制器的姿态信息及每个蓝牙设备接收的蓝牙信号的信号强度,包括:
5.如权利要求1-3任一所述的方法,其特征在于,所述获取控制器的姿态信息及每个蓝牙设备接收的蓝牙信号的信号强度,包括:
6.一种控制器六自由度画面的生成装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述获取模块,还用于:
8.根据权利要求6所述的装置,其特征在于,所述车机中包含蓝牙装置,所述蓝牙设备至少为两个,且所述至少两个蓝牙设备的设置位置与所述车机的位置不共线;
9.如权利要求7-8任一所述的装置,其特征在于,所述获取模块,具体用于:
10.如权利要求7-8任一所述的装置,其特征在于,所述获取模块,具体用于:
11.一种计算机设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,实现如如权利要求1-5中任一所述的控制器六自由度画面的生成方法。
12.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-5中任一所述的控制器六自由度画面的生成方法。
13.一种车辆,其特征在于,所述车辆包含权利要求11所述的计算机设备。
技术总结
本公开提出了一种控制器六自由度画面的生成方法、装置、设备及存储介质,涉及人工智能技术领域。该方法包括:获取控制器的姿态信息及每个蓝牙设备接收的蓝牙信号的信号强度;根据每个所述蓝牙设备接收的蓝牙信号的信号强度,确定每个蓝牙设备与控制器之间的距离;根据每个蓝牙设备的设置位置,以及与控制器间的距离,确定所述控制器的位置信息;基于控制器的姿态信息以及位置信息,生成包含所述控制器六自由度信息的虚拟现实画面。由此,仅需在控制器中布置基础通信的蓝牙模块即可,无需其他定位手段的补充,降低了开发难度,同时也降低了成本,且由于在未使用位置传感器的情况下进行定位,提高了控制器的续航能力。
技术研发人员:丁彬,傅强
受保护的技术使用者:北京罗克维尔斯科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!