一种基于枪机球机联动的隧道监控方法及系统与流程
1.本发明涉及隧道监控技术领域,尤其涉及一种基于枪机球机联动的隧道监控方法及系统。
背景技术:
2.目前,随着隧道技术的发展,隧道建设的里程较长,为了保证隧道的正常运行,对隧道进行监控是非常重要的,现有技术一般都是通过摄像枪对隧道进行监控,然而仅仅通过摄像枪进行监控容易出现漏检和错检的情况,导致隧道监控精度不高,现有也有居住小区运用枪机和球机联动的技术进行监控,但是居住小区运用枪机和球机联动的技术主要采用的是坐标定位方法实现的,而坐标定位方法要求枪机和球机之间的物理位置不能相差太大,一般一米以内,否则会出现很大的误差,因此,现有的枪机和球机联动进行监控的技术难以应用于隧道中。
技术实现要素:
3.有鉴于此,本发明提出一种基于枪机球机联动的隧道监控方法及系统,可以解决现有隧道监控所存在的监控精度不高的缺陷。
4.本发明的技术方案是这样实现的:
5.一种基于枪机球机联动的隧道监控方法,具体包括以下步骤:
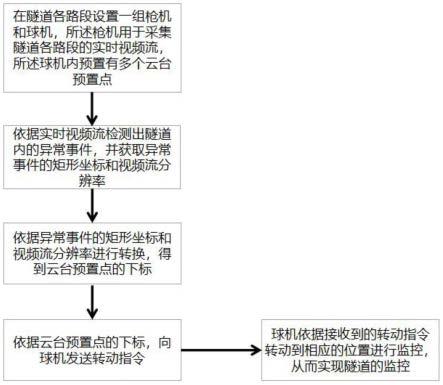
6.步骤s1,在隧道各路段设置一组枪机和球机,所述枪机用于采集隧道各路段的实时视频流,所述球机内预置有多个云台预置点;
7.步骤s2,依据实时视频流检测出隧道内的异常事件,并获取异常事件的矩形坐标和视频流分辨率;
8.步骤s3,依据异常事件的矩形坐标和视频流分辨率进行转换,得到云台预置点的下标;
9.步骤s4,依据云台预置点的下标,向球机发送转动指令;
10.步骤s5,球机依据接收到的转动指令转动到相应的位置进行监控,从而实现隧道的监控。
11.作为所述基于枪机球机联动的隧道监控方法的进一步可选方案,所述步骤s3具体包括以下步骤:
12.步骤s31,依据视频流分辨率进行画面划分,得出球机内各个云台预置点所要占据的画面;
13.步骤s32,依据异常事件的矩形坐标与各个云台预置点所要占据的画面进行比较,得到云台预置点的下标。
14.作为所述基于枪机球机联动的隧道监控方法的进一步可选方案,所述步骤s2中检测出隧道内的异常事件之后,先对异常事件进行过滤筛选,然后再获取剩余的异常事件的矩形坐标。
15.作为所述基于枪机球机联动的隧道监控方法的进一步可选方案,所述步骤s3和步骤s4之间还包括以下步骤:
16.向球机发送聚焦指令,球机依据接收到的聚焦指令进行聚焦操作。
17.作为所述基于枪机球机联动的隧道监控方法的进一步可选方案,所述对异常事件进行过滤筛选,具体包括以下步骤:
18.获取带有标签信息的异常事件视频流;
19.依据所述标签信息判断是否为重复异常事件,若是,则保留重复异常事件中的一个异常事件。
20.一种基于枪机球机联动的隧道监控系统,包括:
21.设置模块,用于在隧道各路段设置一组枪机和球机,所述枪机用于采集隧道各路段的实时视频流,所述球机内预置有多个云台预置点;
22.检测模块,用于依据实时视频流检测出隧道内的异常事件,并获取异常事件的矩形坐标和视频流分辨率;
23.转换模块,用于依据异常事件的矩形坐标和视频流分辨率进行转换,得到云台预置点的下标;
24.转动指令下发模块,用于依据云台预置点的下标,向球机发送转动指令。
25.作为所述基于枪机球机联动的隧道监控系统的进一步可选方案,所述转换模块包括:
26.画面划分模块,用于依据视频流分辨率进行画面划分,得出球机内各个云台预置点所要占据的画面;
27.比较模块,用于依据异常事件的矩形坐标与各个云台预置点所要占据的画面进行比较,得到云台预置点的下标。
28.作为所述基于枪机球机联动的隧道监控系统的进一步可选方案,所述系统还包括过滤筛选模块,所述过滤筛选模块用于对隧道内的重复异常事件进行过滤筛选。
29.作为所述基于枪机球机联动的隧道监控系统的进一步可选方案,所述系统还包括聚焦指令下发模块,所述聚焦指令下发模块用于向球机发送聚焦指令。
30.作为所述基于枪机球机联动的隧道监控系统的进一步可选方案,所述过滤筛选模块包括:
31.获取模块,用于获取带有标签信息的异常事件视频流;
32.判断模块,用于依据所述标签信息判断是否为重复异常事件;
33.保留模块,用于保留重复异常事件中的一个异常事件。
34.本发明的有益效果是:通过在球机内预置有多个云台预置点,依据枪机采集到的实时视频流获取异常事件的矩形坐标和视频流分辨率,并依据异常事件的矩形坐标和视频流分辨率进行转换,得到云台预置点的下标,能够有效依据云台预置点的下标控制球机的转动,从而有效实现隧道内的枪机和球机进行联动,进而提高监控精度。
附图说明
35.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
36.图1为本发明一种基于枪机球机联动的隧道监控方法的流程示意图;
37.图2为本发明一种基于枪机球机联动的隧道监控系统的组成示意图。
具体实施方式
38.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
39.参考图1-2,一种基于枪机球机联动的隧道监控方法,具体包括以下步骤:
40.步骤s1,在隧道各路段设置一组枪机和球机,所述枪机用于采集隧道各路段的实时视频流,所述球机内预置有多个云台预置点;
41.步骤s2,依据实时视频流检测出隧道内的异常事件,并获取异常事件的矩形坐标和视频流分辨率;
42.步骤s3,依据异常事件的矩形坐标和视频流分辨率进行转换,得到云台预置点的下标;
43.步骤s4,依据云台预置点的下标,向球机发送转动指令;
44.步骤s5,球机依据接收到的转动指令转动到相应的位置进行监控,从而实现隧道的监控。
45.在本实施例中,通过在球机内预置有多个云台预置点,依据枪机采集到的实时视频流获取异常事件的矩形坐标和视频流分辨率,并依据异常事件的矩形坐标和视频流分辨率进行转换,得到云台预置点的下标,能够有效依据云台预置点的下标控制球机的转动,从而有效实现隧道内的枪机和球机进行联动,进而提高监控精度。
46.需要说明的是,所述枪机所监控的矩形画面的坐标,矩形坐标表示方式为{x1,y1},{x2,y2},分别代表矩形的左上角与右下角的坐标点。
47.优选的,所述步骤s3具体包括以下步骤:
48.步骤s31,依据视频流分辨率进行画面划分,得出球机内各个云台预置点所要占据的画面;
49.步骤s32,依据异常事件的矩形坐标与各个云台预置点所要占据的画面进行比较,得到云台预置点的下标。
50.在本实施例中,首先根据实时视频流的分辨率进行划分预置点,假设分辨率是1920x1080p,根据隧道特殊场景下,使用分辨率的高度进行划分的效果比宽度的效果显著,再假设想要设置的预置点为6个,故1080除以6为180,那么得出这些预置点所要占据的画面,再根据y1的位置与预置点占据的画面进行比较,若y1落在某个预置点上,得到初步的预置点下标,最后参考y2的坐标进行校正,如果y1与预置点所占画面相差较大,那么会参考y2的坐标,得出最终的预置点下标。
51.优选的,所述步骤s2中检测出隧道内的异常事件之后,先对异常事件进行过滤筛选,然后再获取剩余的异常事件的矩形坐标。
52.在本实施例中,通过对异常事件进行过滤筛选,能够去掉重复的异常事件,只保留重复异常事件中的一件,降低处理量,提高监控效率。
53.优选的,所述步骤s3和步骤s4之间还包括以下步骤:
54.向球机发送聚焦指令,球机依据接收到的聚焦指令进行聚焦操作。
55.在本实施例中,通过先向球机发送聚焦指令,在向球机发送转动指令,能够使得在转动球机后,实时流画面更加清晰的呈现。
56.优选的,所述对异常事件进行过滤筛选,具体包括以下步骤:
57.获取带有标签信息的异常事件视频流;
58.依据所述标签信息判断是否为重复异常事件,若是,则保留重复异常事件中的一个异常事件。
59.在本实施例中,在依据实时视频流检测出隧道内的异常事件过程中,能够得到带有标签信息的异常事件视频,然后再依据标签信息进行判断,从而能够有效判断出是否为重复的异常事件。
60.一种基于枪机球机联动的隧道监控系统,包括:
61.设置模块,用于在隧道各路段设置一组枪机和球机,所述枪机用于采集隧道各路段的实时视频流,所述球机内预置有多个云台预置点;
62.检测模块,用于依据实时视频流检测出隧道内的异常事件,并获取异常事件的矩形坐标和视频流分辨率;
63.转换模块,用于依据异常事件的矩形坐标和视频流分辨率进行转换,得到云台预置点的下标;
64.转动指令下发模块,用于依据云台预置点的下标,向球机发送转动指令。
65.在本实施例中,通过在球机内预置有多个云台预置点,依据枪机采集到的实时视频流获取异常事件的矩形坐标和视频流分辨率,并依据异常事件的矩形坐标和视频流分辨率进行转换,得到云台预置点的下标,能够有效依据云台预置点的下标控制球机的转动,从而有效实现隧道内的枪机和球机进行联动,进而提高监控精度。
66.需要说明的是,所述枪机所监控的矩形画面的坐标,矩形坐标表示方式为{x1,y1},{x2,y2},分别代表矩形的左上角与右下角的坐标点。
67.优选的,所述转换模块包括:
68.画面划分模块,用于依据视频流分辨率进行画面划分,得出球机内各个云台预置点所要占据的画面;
69.比较模块,用于依据异常事件的矩形坐标与各个云台预置点所要占据的画面进行比较,得到云台预置点的下标。
70.在本实施例中,首先根据实时视频流的分辨率进行划分预置点,假设分辨率是1920x1080p,根据隧道特殊场景下,使用分辨率的高度进行划分的效果比宽度的效果显著,再假设想要设置的预置点为6个,故1080除以6为180,那么得出这些预置点所要占据的画面,再根据y1的位置与预置点占据的画面进行比较,若y1落在某个预置点上,得到初步的预置点下标,最后参考y2的坐标进行校正,如果y1与预置点所占画面相差较大,那么会参考y2的坐标,得出最终的预置点下标。
71.优选的,所述系统还包括过滤筛选模块,所述过滤筛选模块用于对隧道内的重复
异常事件进行过滤筛选。
72.在本实施例中,通过对异常事件进行过滤筛选,能够去掉重复的异常事件,只保留重复异常事件中的一件,降低处理量,提高监控效率。
73.优选的,所述系统还包括聚焦指令下发模块,所述聚焦指令下发模块用于向球机发送聚焦指令。
74.在本实施例中,通过先向球机发送聚焦指令,在向球机发送转动指令,能够使得在转动球机后,实时流画面更加清晰的呈现。
75.优选的,所述过滤筛选模块包括:
76.获取模块,用于获取带有标签信息的异常事件视频流;
77.判断模块,用于依据所述标签信息判断是否为重复异常事件;
78.保留模块,用于保留重复异常事件中的一个异常事件。
79.在本实施例中,在依据实时视频流检测出隧道内的异常事件过程中,能够得到带有标签信息的异常事件视频,然后再依据标签信息进行判断,从而能够有效判断出是否为重复的异常事件。
80.以上所述仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1