基于赤道仪的航天器跟踪拍摄处理方法及相关设备与流程
本申请涉及天文观测,尤其涉及一种基于赤道仪的航天器跟踪拍摄处理方法及相关设备。
背景技术:
1、中低轨航天器的光学追踪是航天测控和近地卫星通信领域的一项关键工作,而基于赤道仪对航天器进行跟踪拍摄,需要赤道仪高频次的去获取跟踪的航天器的坐标值,但通常情况下,赤道仪中负责提供算力的模块会因为算力不够,而不能高频次的去获取航天器的坐标值。例如,赤道仪间隔50ms才获取一次航天器的坐标值,然后驱动赤道仪中的步进电机转动到该坐标值位置处。
2、由于赤道仪需要间隔较长的时间去获取航天器坐标值,导致对航天器进行跟踪拍摄的实际情况是航天器已经前往下一个轨迹点,而赤道仪还未开始往下一个轨迹点移动,因此跟踪拍摄的画面出现明显的顿挫感,进而产生基于赤道仪跟踪拍摄的航天器视频显示效果较差的问题。
技术实现思路
1、本申请实施例提供一种基于赤道仪的航天器跟踪拍摄处理方法及相关设备,以解决现有技术存在的基于赤道仪跟踪拍摄的航天器视频显示效果较差的问题。
2、第一方面,本申请实施例提供一种基于赤道仪的航天器跟踪拍摄处理方法,包括:
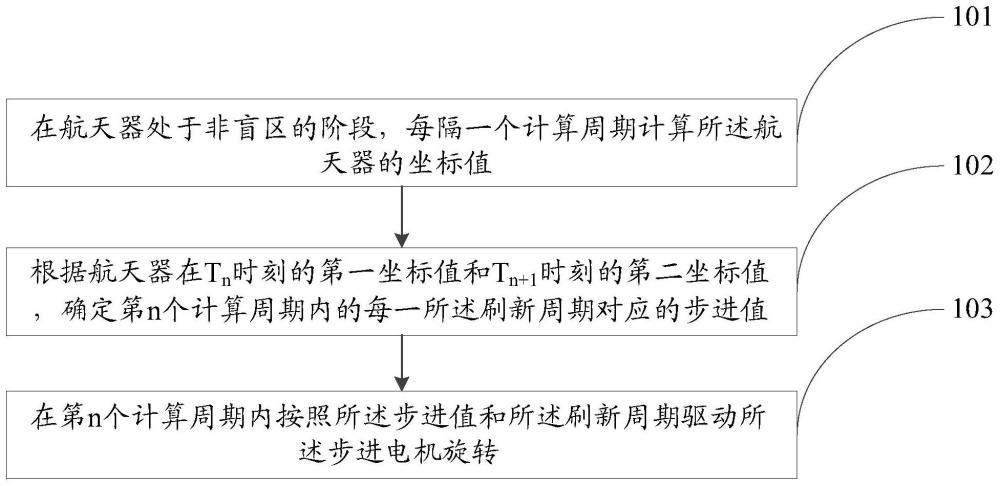
3、在航天器处于非盲区的阶段,每隔一个计算周期计算航天器的坐标值,每一计算周期包括w个刷新周期,w为大于1的整数,刷新周期表示赤道仪内的步进电机相邻两次驱动的间隔时长;
4、根据航天器在tn时刻的第一坐标值和tn+1时刻的第二坐标值,确定第n个计算周期内的每一刷新周期对应的步进值,tn时刻为第n个计算周期的开始时刻,tn+1时刻为第n+1个计算周期的开始时刻,n为正整数;
5、在第n个计算周期内按照步进值和刷新周期驱动步进电机旋转,以使赤道仪跟踪拍摄航天器。
6、第二方面,本申请实施例提供一种基于赤道仪的航天器跟踪拍摄处理方法,包括:
7、在第n个计算周期进行跟踪拍摄的过程中,每隔一个第一周期生成并记录一个参考帧对应的时间戳、所述赤道仪的地理纬度角和所述航天器的空间位置信息;
8、基于所述赤道仪的地理纬度角和所述航天器的空间位置信息确定所述参考帧的场旋角和偏移方向;
9、基于相邻两个所述参考帧的场旋角和时间戳进行线性拟合,得到相邻两个参考帧之间的视频帧的场旋角;
10、按照每一视频帧的场旋角对每一视频帧进行旋转。
11、第三方面,本申请实施例提供一种基于赤道仪的航天器跟踪拍摄处理方法,包括:
12、在所述航天器进入盲区阶段后,所述赤道仪以最高时角速率持续转动;
13、在所述赤道仪以最高时角速率持续转动的情况下,当所述赤道仪的时角和所述航天器的时角的差值小于第一预设值时,所述赤道仪开始降低时角速率;
14、在所述赤道仪降低时角速率的情况下,当所述赤道仪的时角速率与所述航天器的时角速率的差值小于第二预设值时,所述赤道仪停止降低时角速率;
15、当所述赤道仪的时角与所述航天器的时角之间的差值为零,所述赤道仪以所述航天器的时角速率持续转动。
16、第四方面,本申请实施例提供一种基于赤道仪的航天器跟踪拍摄处理装置,包括:
17、计算模块,在航天器处于非盲区的阶段,每隔一个计算周期计算航天器的坐标值,每一计算周期包括w个刷新周期,w为大于1的整数,刷新周期表示赤道仪内的步进电机相邻两次驱动的间隔时长;
18、确定模块,根据航天器在tn时刻的第一坐标值和tn+1时刻的第二坐标值,确定第n个计算周期内的每一刷新周期对应的步进值,tn时刻为第n个计算周期的开始时刻,tn+1时刻为第n+1个计算周期的开始时刻,n为正整数;
19、驱动模块,在第n个计算周期内按照步进值和刷新周期驱动步进电机旋转,以使赤道仪跟踪拍摄航天器。
20、第五方面,本申请实施例提供一种基于赤道仪的航天器跟踪拍摄处理装置,包括:
21、生成模块,在第n个计算周期进行跟踪拍摄的过程中,每隔一个第一周期生成并记录一个参考帧对应的时间戳、所述赤道仪的地理纬度角和所述航天器的空间位置信息;
22、第二确定模块,基于所述赤道仪的地理纬度角和所述航天器的空间位置信息确定所述参考帧的场旋角和偏移方向;
23、获得模块,基于相邻两个所述参考帧的场旋角和时间戳进行线性拟合,获得相邻两个参考帧之间的视频帧的场旋角;
24、旋转模块,按照每一视频帧的场旋角对每一视频帧进行旋转。
25、第六方面,本申请实施例提供一种基于赤道仪的航天器跟踪拍摄处理装置,包括:
26、第一持续模块,在所述航天器进入盲区阶段后,所述赤道仪以最高时角速率持续转动;
27、降低模块,在所述赤道仪以最高时角速率持续转动的情况下,当所述赤道仪的时角和所述航天器的时角的差值小于第一预设值时,所述赤道仪开始降低时角速率;
28、停止模块,在所述赤道仪降低时角速率的情况下,当所述赤道仪的时角速率与所述航天器的时角速率的差值小于第二预设值时,所述赤道仪停止降低时角速率;
29、第二持续模块,当所述赤道仪的时角与所述航天器的时角之间的差值为零,所述赤道仪以所述航天器的时角速率持续转动。
30、第七方面,本申请实施例提供一种通信设备,包括:收发机、存储器、处理器及存储在存储器上并可在处理器上运行的程序;其特征在于,处理器,用于读取存储器中的程序实现如前述任一项的方法中的步骤。
31、第八方面,本申请实施例提供一种可读存储介质,用于存储程序,其特征在于,程序被处理器执行时实现如前述任一项的方法中的步骤。
32、本申请实施例通过在航天器处于非盲区的阶段,每隔一个计算周期计算航天器的坐标值,每一计算周期包括w个刷新周期,w为大于1的整数,刷新周期表示赤道仪内的步进电机相邻两次驱动的间隔时长;根据航天器在tn时刻的第一坐标值和tn+1时刻的第二坐标值,确定第n个计算周期内的每一刷新周期对应的步进值,tn时刻为第n个计算周期的开始时刻,tn+1时刻为第n+1个计算周期的开始时刻,n为正整数;在第n个计算周期内按照步进值和刷新周期驱动步进电机旋转,以使赤道仪跟踪拍摄航天器。从而间接的实现高频获取航天器的坐标值并提供给赤道仪上的步进电机以供驱动,赤道仪高频率的更新自身视场指向的坐标值,可以让航天器走出视场的时间减少,拍摄出来的航天器的视频也更为连贯,因此本申请实施例提高了基于赤道仪跟踪拍摄的航天器视频显示效果。
技术特征:
1.一种基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,包括:
2.根据权利要求1所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,所述在第n个计算周期内按照所述步进值和所述刷新周期驱动所述进电机旋转,以使所述赤道仪跟踪拍摄所述航天器之后,所述方法还包括:
3.根据权利要求2所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,所述基于所述赤道仪的地理纬度角和所述航天器的空间位置信息确定所述参考帧的场旋角和偏移方向包括:
4.根据权利要求2所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,所述基于相邻两个所述参考帧的场旋角和时间戳进行线性拟合,获得相邻两个目参考帧之间的视频帧的场旋角包括:
5.根据权利要求1所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,所述在航天器处于非盲区的阶段,每隔一个计算周期计算所述航天器的坐标值之前,还包括:
6.根据权利要求5所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,包括:
7.根据权利要求6所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,所述基于第一预设时间段、第一加速度、第二预设时间段和第二加速度,判断是否存在第三预设时间段,包括:
8.根据权利要求7所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,
9.根据权利要求1所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,包括:
10.根据权利要求9所述的基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,所述在所述航天器进入盲区阶段后,所述赤道仪以最高时角速率持续转动之前,还包括:
11.一种基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,包括:
12.一种基于赤道仪的航天器跟踪拍摄处理方法,其特征在于,包括:
13.一种基于赤道仪的航天器跟踪拍摄处理装置,其特征在于,包括:
14.一种基于赤道仪的航天器跟踪拍摄处理装置,其特征在于,包括:
15.一种基于赤道仪的航天器跟踪拍摄处理装置,其特征在于,包括:
16.一种通信设备,包括:收发机、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序;其特征在于,所述处理器,用于读取存储器中的程序实现如权利要求1至12中任一项所述的方法中的步骤。
17.一种可读存储介质,用于存储程序,其特征在于,所述程序被处理器执行时实现如权利要求1至12中任一项所述的方法中的步骤。
技术总结
本申请提供一种基于赤道仪的航天器跟踪拍摄处理方法及相关设备,通过在航天器处于非盲区的阶段,每隔一个计算周期计算航天器的坐标值,每一计算周期包括W个刷新周期;根据航天器在T<subgt;n</subgt;时刻的第一坐标值和T<subgt;n+1</subgt;时刻的第二坐标值,确定第n个计算周期内的每一刷新周期对应的步进值;在第n个计算周期内按照步进值和刷新周期驱动步进电机旋转,以使赤道仪跟踪拍摄航天器。从而间接的实现高频获取航天器的坐标值并提供给赤道仪上的步进电机以供驱动,赤道仪高频率的更新自身视场指向的坐标值,可以避免航天器脱离视场,跟踪过程更加平滑,拍摄出来的航天器的视频也更为连贯,因此本申请实施例提高了基于赤道仪跟踪拍摄的航天器视频显示效果。
技术研发人员:谢星伟
受保护的技术使用者:中移物联网有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!