一种参数不确定的海洋传感网定位方法
本发明涉及海洋无线传感网节点定位,尤其是涉及一种参数不确定的海洋传感网定位方法。
背景技术:
1、作为海上信息互联互通的重要途经之一,对海洋传感网(ocean sensornetworks,osns)的研究具有较高的学术意义和科学价值,它不仅可以应用于海上交通运输,在海洋生态监测、海上搜救等领域都有广阔的应用前景。而其中的关键技术之一即是节点的定位技术,通过该技术可获取数据的位置信息,为接下来的决策等提供了较可靠的依据。
2、然而,如何在复杂多变的海洋环境中获取目标节点较为可靠的位置信息是一个挑战,特别是由于设备损耗抑或是环境相关参数如温度、湿度等变化,导致信号传播过程中的相关参数存在极大的不确定性,进而使定位精度下降。现有存在的定位技术均是基于传播参数已知的基础上展开的,不能很好地应对传播参数存在较大不确定等情况,从而使得定位误差增大。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供的一种参数不确定的海洋传感网定位方法,以解决因设备损耗、环境参数变化而导致信号传播参数不确定引起的定位误差增大的问题。
2、本发明的目的可以通过以下技术方案来实现:
3、一种参数不确定的海洋传感网定位方法,包括以下步骤:
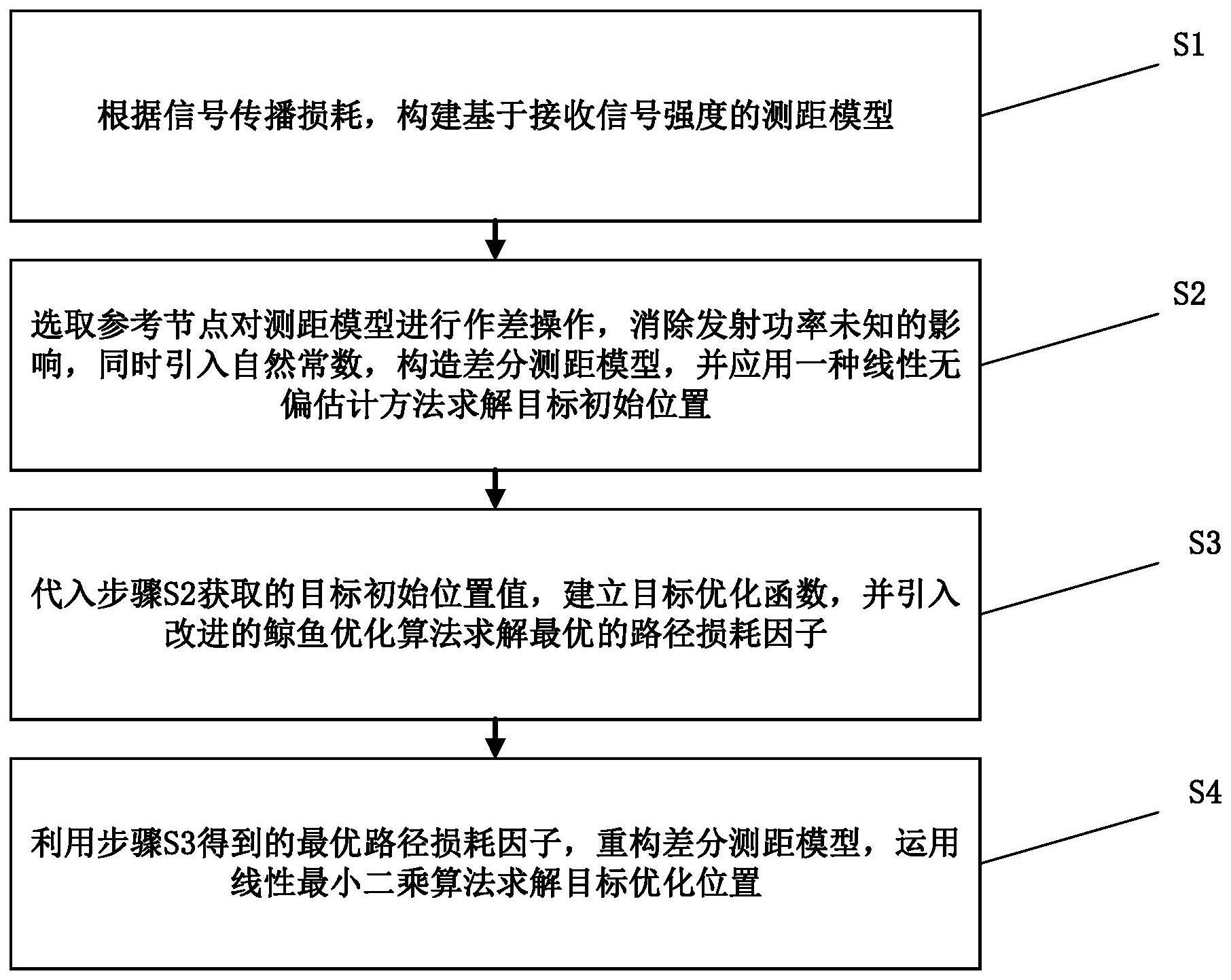
4、s1、根据信号传播损耗,构建基于接收信号强度的测距模型;
5、s2、选取参考节点,对参考节点的测距模型进行作差操作,引入自然常数,构造差分测距模型,采用线性无偏估计方法求解目标初始位置;
6、s3、基于目标初始位置建立以路径损耗因子为待求变量的目标优化函数,构建约束,采用改进的鲸鱼优化算法求解最优路径损耗因子;
7、s4、基于最优路径损耗因子重构差分测距模型,采用线性最小二乘法求解重构的差分测距模型,得到优化后的目标位置。
8、进一步地,所述测距模型为:
9、
10、其中,pri表示第i个锚节点的接收信号强度;d0表示参考距离值;p0表示目标的发射功率;α表示路径损耗因子;γi表示高斯分布海浪遮蔽噪声。
11、进一步地,路径损耗因子取[2,6]。
12、进一步地,所述改进的鲸鱼优化算法通过包围猎物、狩猎行为、搜索猎物三步对目标优化函数进行求解。
13、进一步地,所述包围猎物具体为引入扰动量及随机数对目标优化函数进行更新。
14、进一步地,所述狩猎行为具体为模拟鲸鱼的螺旋式狩猎行为,基于鲸鱼螺旋进攻狩猎趋势对目标优化函数进行更新。
15、进一步地,所述鲸鱼螺旋进攻狩猎趋势包括收缩和螺旋进攻,所述收缩和螺旋进攻的概率均为0.5。
16、进一步地,所述作差操作为将参考节点外的其他锚节点对应的测距模型与参考节点的测距模型作差。
17、进一步地,对参考节点的测距模型进行作差操作后,对得到的测距模型中的对数进行换底和平方操作,平方操作后引入自然常数。
18、进一步地,引入自然常数后,基于一阶泰勒级数展开式构造差分测距模型。
19、与现有技术相比,本发明具有以下有益效果:
20、(1)选取参考节点,对参考节点的测距模型进行作差操作,可以消除发射功率未知的影响,克服发射功率这一传播参数存在较大不确定时的定位的问题,提高定位的精度。
21、(2)基于目标初始位置建立以路径损耗因子为待求变量的目标优化函数,构建约束,采用改进的鲸鱼优化算法求解最优路径损耗因子,克服路径损耗因子这一传播参数存在较大不确定时的定位的问题,提高定位的精度。
技术特征:
1.一种参数不确定的海洋传感网定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种参数不确定的海洋传感网定位方法,其特征在于,所述测距模型为:
3.根据权利要求2所述的一种参数不确定的海洋传感网定位方法,其特征在于,路径损耗因子取[2,6]。
4.根据权利要求1所述的一种参数不确定的海洋传感网定位方法,其特征在于,所述改进的鲸鱼优化算法通过包围猎物、狩猎行为、搜索猎物三步对目标优化函数进行求解。
5.根据权利要求4所述的一种参数不确定的海洋传感网定位方法,其特征在于,所述包围猎物具体为引入扰动量及随机数对目标优化函数进行更新。
6.根据权利要求4所述的一种参数不确定的海洋传感网定位方法,其特征在于,所述狩猎行为具体为模拟鲸鱼的螺旋式狩猎行为,基于鲸鱼螺旋进攻狩猎趋势对目标优化函数进行更新。
7.根据权利要求6所述的一种参数不确定的海洋传感网定位方法,其特征在于,所述鲸鱼螺旋进攻狩猎趋势包括收缩和螺旋进攻,所述收缩和螺旋进攻的概率均为0.5。
8.根据权利要求1所述的一种参数不确定的海洋传感网定位方法,其特征在于,所述作差操作为将参考节点外的其他锚节点对应的测距模型与参考节点的测距模型作差。
9.根据权利要求1所述的一种参数不确定的海洋传感网定位方法,其特征在于,对参考节点的测距模型进行作差操作后,对得到的测距模型中的对数进行换底和平方操作,平方操作后引入自然常数。
10.根据权利要求1所述的一种参数不确定的海洋传感网定位方法,其特征在于,引入自然常数后,基于一阶泰勒级数展开式构造差分测距模型。
技术总结
本发明涉及一种参数不确定的海洋传感网定位方法,方法包括以下步骤:S1、根据信号传播损耗,构建基于接收信号强度的测距模型;S2、选取参考节点,对参考节点的测距模型进行作差操作,引入自然常数,构造差分测距模型,采用线性无偏估计方法求解目标初始位置;S3、基于目标初始位置建立以路径损耗因子为待求变量的目标优化函数,构建约束,采用改进的鲸鱼优化算法求解最优路径损耗因子;S4、基于最优路径损耗因子重构差分测距模型,采用线性最小二乘法求解重构的差分测距模型,得到优化后的目标位置。与现有技术相比,本发明具有定位精度高等优点。
技术研发人员:梅骁峻,吴华锋,韩德志,陈信强,鲜江峰,李美琪,张倩楠,王维军
受保护的技术使用者:上海海事大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!