一种UWB下行TDOA实时定位方法和系统与流程
本发明涉及uwb定位,特别是涉及一种uwb下行tdoa实时定位方法和系统。
背景技术:
1、uwb作为主流室内测距和定位技术,能够获得厘米级的测量精度,基于uwb技术的定位系统多种多样,主要分为tof测距系统和tdoa差分系统,tdoa差分系统又可以分为上行tdoa系统和下行tdoa系统,上行tdoa系统为被定位目标(标签)发送信号,定位基站接收信号。下行tdoa系统为被定位基站发送信号,被定位目标(标签)接收信号。下行tdoa系统相较于tof测距系统以及上行tdoa系统具有类似于gnss系统无限的定位容量,因而具有很大的吸引力。
2、基于uwb技术的下行tdoa定位系统,往往需要一个高精度的时钟同步网络,该时钟同步网络大多采用专用的有线网络以保障同步精度,不同的基站通过时钟同步网络能够获得一致的系统时钟,不同的基站在不同的时隙发送uwb信号,实现对空口资源的时分复用,定位标签接收不同定位基站发送的uwb信号,计算两两定位基站之间的距离差分结果,并通过多组距离差分来估计自身的位置。
3、由此可见,现有基于uwb的下行tdoa定位系统,需要提前部署专用的时钟同步网络来保障定位基站之间的高精度时钟同步,基于有线的专用的时钟同步网络部署复杂成本高,基于无线的专用的时钟同步网络需要占用较多的空口资源和系统功耗,无法实现定位基站的低功耗运行。
技术实现思路
1、本发明所要解决的技术问题是提供一种uwb下行tdoa实时定位方法和系统,无需额外的时间同步网络或者额外同步报文交互,同时基站可以实现低功耗运行,使得基站可以用电池供电,大大降低了基站的部署复杂度。
2、本发明解决其技术问题所采用的技术方案是:提供一种uwb下行tdoa实时定位方法,基于基站和定位标签,所述定位标签执行以下步骤:
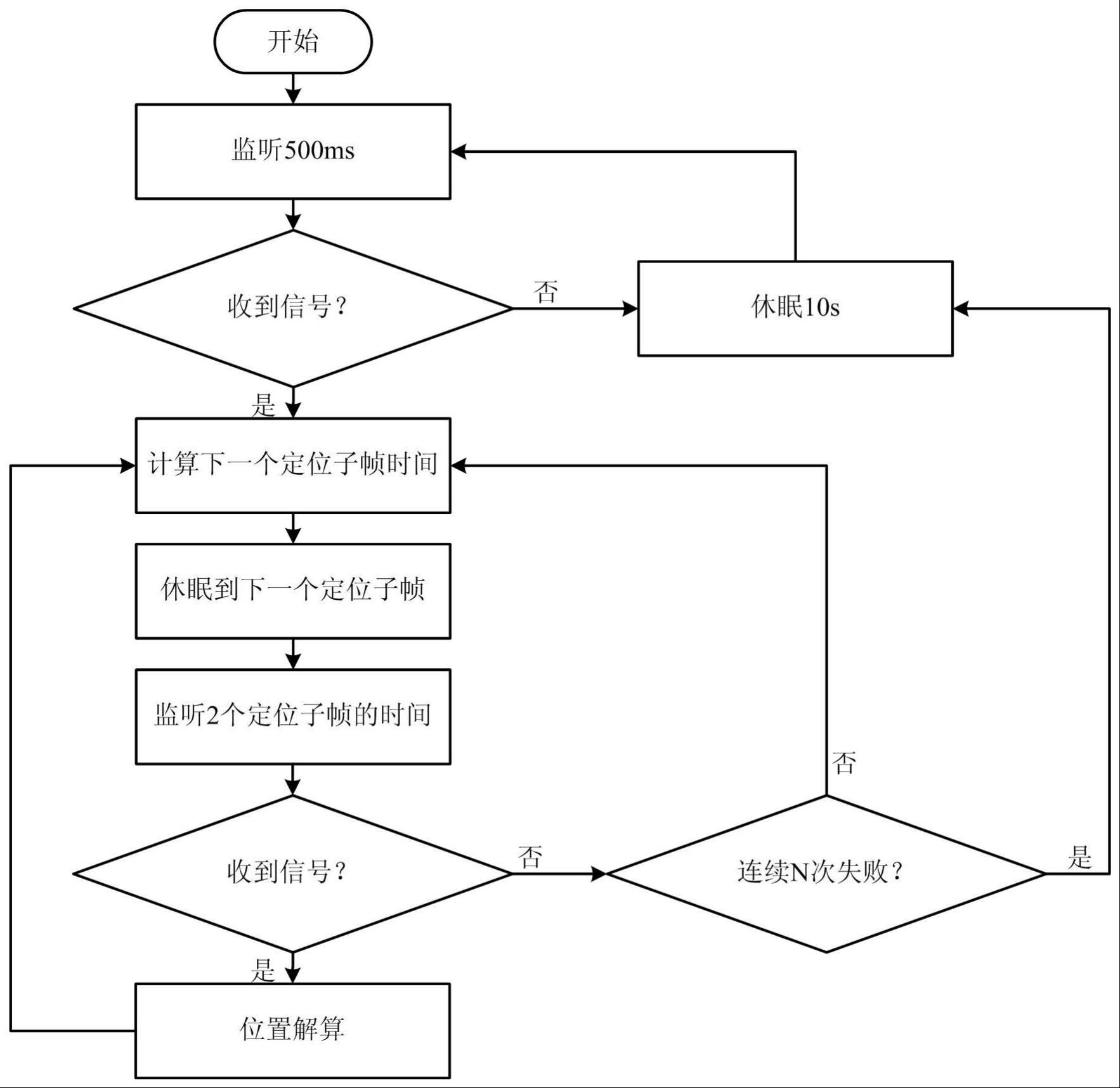
3、在接收到任何基站发送的报文后,计算下一个定位子帧的时间;
4、在每个定位子帧唤醒uwb芯片进行报文接收,完成对定位基本单元的接收,并从报文中得到定位参数;其中,所述定位基本单元由连续的两个定位子帧构成,每个定位子帧内包含若干基站按照时分的方式分别发送广播报文,且每个基站的发送时隙之间设有相同的保护时间;
5、根据定位参数对每一对基站进行距离差分估计;
6、利用距离差分估计进行位置估计。
7、所述基站在工作的定位子帧内,在自身的时隙处发送广播报文,在其余时刻处于接收状态;所述基站在非工作时进行休眠。
8、所述报文内包含:帧编号、时隙编号、基站编号、基站坐标、消息的本地发送时间、本基站接收到的前几个其他基站广播报文的本地接收时间。
9、所述根据定位参数对每一对基站进行距离差分估计时,采用的计算公式为:其中,tf为定位子帧的时长,tr(m)为接收第二个定位子帧内第m个基站报文的时间,tr(m)′为接收第一个定位子帧内第m个基站报文的时间;tm为第二个定位子帧第m个基站发送报文时刻相对于解算定义的起始时刻的偏移量;tr(n)为接收第二个定位子帧内第n个基站报文的时间,tr(n)′为接收第一个定位子帧内第n个基站报文的时间;tn为第二个定位子帧第n个基站发送报文时刻相对于解算定义的起始时刻的偏移量;为第二个定位子帧内第n个基站的报文发送时刻,为第一个定位子帧内第n个基站的报文发送时刻;为第二个子帧内第n个基站收到第m个基站报文的接收时间,为第一个子帧内第n个基站收到第m个基站报文的接收时间;tofm,n为第m个基站与第n个基站之间的距离,tofm-tofn表示定位标签到第m个基站与第n个基站之间的距离差分,其中,n>m。
10、所述利用距离差分估计进行位置估计具体为:采用chan算法利用距离差分估计进行位置估计。
11、本发明解决其技术问题所采用的技术方案是:提供一种uwb下行tdoa实时定位系统,包括基站和定位标签,所述基站用于发送广播报文,所述定位标签包括:
12、接收计算模块,用于在接收到任何基站发送的报文后,计算下一个定位子帧的时间;
13、接收提取模块,用于在每个定位子帧唤醒uwb芯片进行报文接收,完成对定位基本单元的接收,并从报文中得到定位参数;其中,所述定位基本单元由连续的两个定位子帧构成,每个定位子帧内包含若干基站按照时分的方式分别发送广播报文,且每个基站的发送时隙之间设有相同的保护时间;
14、距离差分估计模块,用于根据定位参数对每一对基站进行距离差分估计;
15、位置估计模块,用于利用距离差分估计进行位置估计。
16、所述基站在工作的定位子帧内,在自身的时隙处发送广播报文,在其余时刻处于接收状态;所述基站在非工作时进行休眠。
17、所述报文内包含:帧编号、时隙编号、基站编号、基站坐标、消息的本地发送时间、本基站接收到的前几个其他基站广播报文的本地接收时间。
18、所述距离差分估计模块采用对每一对基站进行距离差分估计,其中,tf为定位子帧的时长,tr(m)为接收第二个定位子帧内第m个基站报文的时间,tr(m)′为接收第一个定位子帧内第m个基站报文的时间;tm为第二个定位子帧第m个基站发送报文时刻相对于解算定义的起始时刻的偏移量;tr(n)为接收第二个定位子帧内第n个基站报文的时间,tr(n)′为接收第一个定位子帧内第n个基站报文的时间;tn为第二个定位子帧第n个基站发送报文时刻相对于解算定义的起始时刻的偏移量;为第二个定位子帧内第n个基站的报文发送时刻,为第一个定位子帧内第n个基站的报文发送时刻;为第二个子帧内第n个基站收到第m个基站报文的接收时间,为第一个子帧内第n个基站收到第m个基站报文的接收时间;tofm,n为第m个基站与第n个基站之间的距离,tofm-tofn表示定位标签到第m个基站与第n个基站之间的距离差分,其中,n>m。
19、所述位置估计模块采用chan算法利用距离差分估计进行位置估计。
20、有益效果
21、由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明通过连续的两个定位子帧组成一个定位基本单元,在定位过程中无需依赖时钟同步,并且能够保障定位基站的低功耗运行,使得定位基站可以采用电池进行供电,不需要额外的线路部署,大大降低了系统的安装和维护复杂度。
技术特征:
1.一种uwb下行tdoa实时定位方法,基于基站和定位标签,其特征在于,所述定位标签执行以下步骤:
2.根据权利要求1所述的uwb下行tdoa实时定位方法,其特征在于,所述基站在工作的定位子帧内,在自身的时隙处发送广播报文,在其余时刻处于接收状态;所述基站在非工作时进行休眠。
3.根据权利要求1所述的uwb下行tdoa实时定位方法,其特征在于,所述报文内包含:帧编号、时隙编号、基站编号、基站坐标、消息的本地发送时间、本基站接收到的前几个其他基站广播报文的本地接收时间。
4.根据权利要求1所述的uwb下行tdoa实时定位方法,其特征在于,所述根据定位参数对每一对基站进行距离差分估计时,采用的计算公式为:其中,tf为定位子帧的时长,tr(m)为接收第二个定位子帧内第m个基站报文的时间,tr(m)′为接收第一个定位子帧内第m个基站报文的时间;tm为第二个定位子帧第m个基站发送报文时刻相对于解算定义的起始时刻的偏移量;tr(n)为接收第二个定位子帧内第n个基站报文的时间,tr(n)′为接收第一个定位子帧内第n个基站报文的时间;tn为第二个定位子帧第n个基站发送报文时刻相对于解算定义的起始时刻的偏移量;为第二个定位子帧内第n个基站的报文发送时刻,为第一个定位子帧内第n个基站的报文发送时刻;为第二个子帧内第n个基站收到第m个基站报文的接收时间,为第一个子帧内第n个基站收到第m个基站报文的接收时间;tofm,n为第m个基站与第n个基站之间的距离,tofm-tofn表示定位标签到第m个基站与第n个基站之间的距离差分,其中,n>m。
5.根据权利要求1所述的uwb下行tdoa实时定位方法,其特征在于,所述利用距离差分估计进行位置估计具体为:采用chan算法利用距离差分估计进行位置估计。
6.一种uwb下行tdoa实时定位系统,包括基站和定位标签,所述基站用于发送广播报文,其特征在于,所述定位标签包括:
7.根据权利要求6所述的uwb下行tdoa实时定位系统,其特征在于,所述基站在工作的定位子帧内,在自身的时隙处发送广播报文,在其余时刻处于接收状态;所述基站在非工作时进行休眠。
8.根据权利要求6所述的uwb下行tdoa实时定位系统,其特征在于,所述报文内包含:帧编号、时隙编号、基站编号、基站坐标、消息的本地发送时间、本基站接收到的前几个其他基站广播报文的本地接收时间。
9.根据权利要求6所述的uwb下行tdoa实时定位系统,其特征在于,所述距离差分估计模块采用对每一对基站进行距离差分估计,其中,tf为定位子帧的时长,tr(m)为接收第二个定位子帧内第m个基站报文的时间,tr(m)′为接收第一个定位子帧内第m个基站报文的时间;tm为第二个定位子帧第m个基站发送报文时刻相对于解算定义的起始时刻的偏移量;tr(n)为接收第二个定位子帧内第n个基站报文的时间,tr(n)′为接收第一个定位子帧内第n个基站报文的时间;tn为第二个定位子帧第n个基站发送报文时刻相对于解算定义的起始时刻的偏移量;为第二个定位子帧内第n个基站的报文发送时刻,为第一个定位子帧内第n个基站的报文发送时刻;为第二个子帧内第n个基站收到第m个基站报文的接收时间,为第一个子帧内第n个基站收到第m个基站报文的接收时间;tofm,n为第m个基站与第n个基站之间的距离,
10.根据权利要求6所述的uwb下行tdoa实时定位系统,其特征在于,所述位置估计模块采用chan算法利用距离差分估计进行位置估计。
技术总结
本发明涉及一种UWB下行TDOA实时定位方法和系统,其中,方法包括:在接收到任何基站发送的报文后,计算下一个定位子帧的时间;在每个定位子帧唤醒UWB芯片进行报文接收,完成对定位基本单元的接收,并从报文中得到定位参数;其中,所述定位基本单元由连续的两个定位子帧构成,每个定位子帧内包含若干基站按照时分的方式分别发送广播报文,且每个基站的发送时隙之间设有相同的保护时间;根据定位参数对每一对基站进行距离差分估计;利用距离差分估计进行位置估计。本发明在定位过程中无需依赖时钟同步,并且能够保障定位基站的低功耗运行。
技术研发人员:唐珂,屠恩源
受保护的技术使用者:芯与物(上海)技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!