基于斯托克斯三维空间的幅值自适应相干光解偏方法
本发明涉及通信,尤其是指一种基于斯托克斯三维空间的幅值自适应相干光解偏方法。
背景技术:
1、偏振复用技术由于可以将相干光通信系统的信道容量提高一倍而被广泛使用。然而,双偏信号在光纤里传输,会受到超快的偏振态旋转影响,这将造成严重的信号质量下降。因此,研究用于追踪时变偏振态的高精度解偏算法是很有必要的。
2、目前已经有了多种解偏算法,例如,恒模算法。这是一种经典的解偏算法,它在纠正偏振态旋转的同时,对偏振模色散和偏振相关损耗都有一定的均衡,但是恒模算法的收敛速度不快并且存在着奇异性的问题。为了提高收敛速度,有学者提出了一种基于斯托克斯空间的解偏算法。这种算法的具体方法是先求出双偏信号在斯托克斯三维空间的最小二乘拟合平面,再求出拟合平面的法向量,最后用求出的法向量计算解偏矩阵用于解偏。这种方法在静态偏振态的条件下性能很好,但却不适用于偏振态随时间变化的情况。为了解决这个问题,有学者提出了一种基于斯托克斯三维空间的自适应解偏算法,并且这种算法无需计算双偏信号在斯托克斯三维空间的最小二乘拟合平面。此外,卡尔曼滤波也被用于偏振态的追踪和解偏。通过将两种方法进行研究比较,学者发现基于斯托克斯三维空间的自适应解偏算法可以表现出和基于卡尔曼滤波的解偏算法相似的性能,但计算复杂度却降低了约90%。尽管如此,基于斯托克斯三维空间的自适应解偏算法并没有对接收到的信号进行充分利用。对于m-qam信号,不同幅值组合的双偏信号在斯托克斯空间有着不同的分布。其中,幅值最小的双偏信号组合将会在斯托克斯空间形成四个幅值最小的团簇,而这些团簇里的信号在基于斯托克斯三维空间的自适应解偏算法中几乎没有作用。
技术实现思路
1、为此,本发明所要解决的技术问题在于提供一种收敛速度快、准确率高的基于斯托克斯三维空间的幅值自适应相干光解偏方法。
2、为解决上述技术问题,本发明提供了一种基于斯托克斯三维空间的幅值自适应相干光解偏方法,其包括以下步骤:
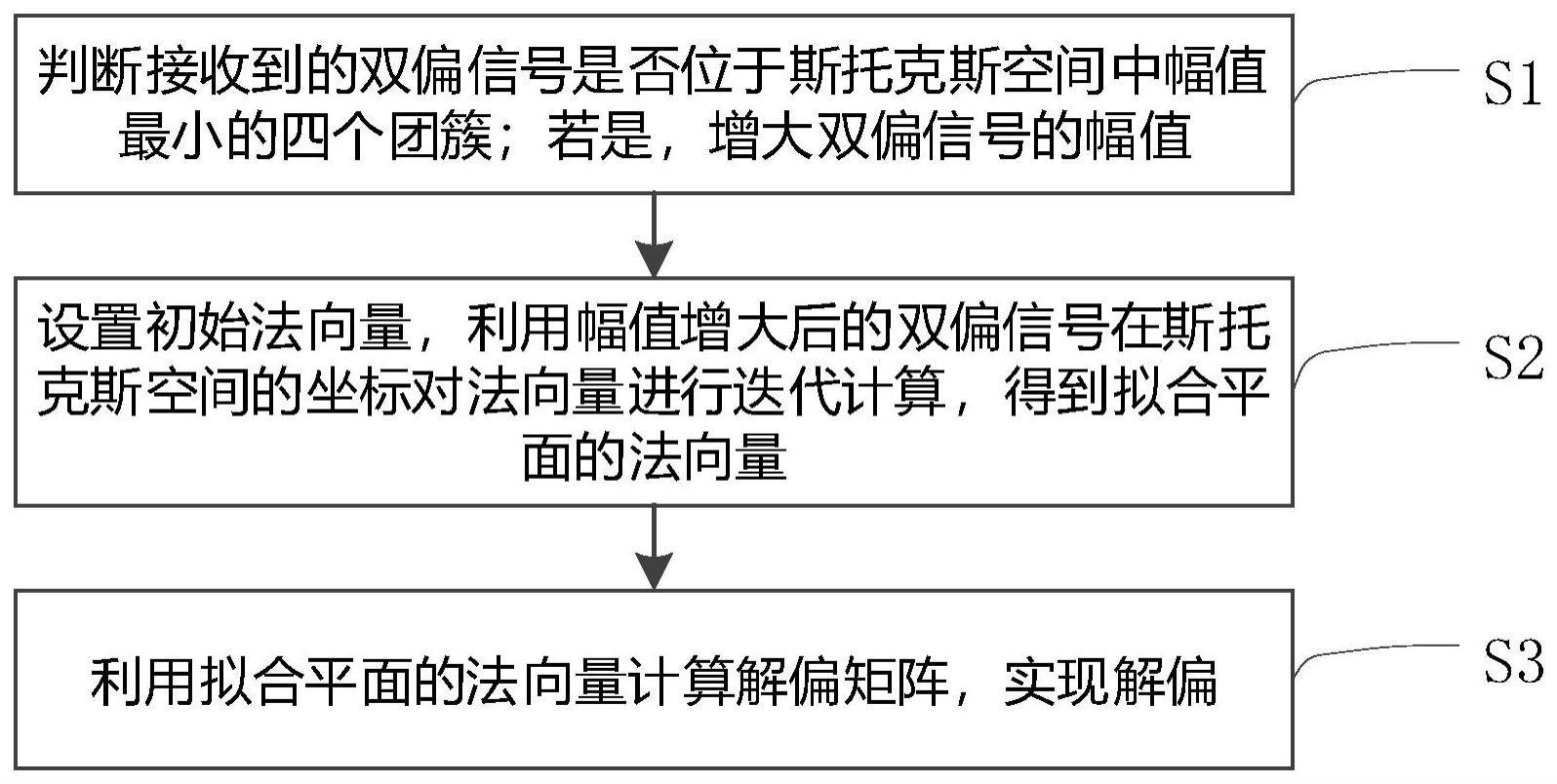
3、s1、判断接收到的双偏信号是否位于斯托克斯空间中幅值最小的四个团簇;若是,增大双偏信号的幅值;
4、s2、设置初始法向量,利用幅值增大后的双偏信号在斯托克斯空间的坐标对法向量进行迭代计算,得到拟合平面的法向量;
5、s3、利用拟合平面的法向量计算解偏矩阵,实现解偏。
6、在本发明的一个实施例中,所述步骤s1包括:先计算双偏信号在斯托克斯空间的期望幅值,判断双偏信号的幅值是否小于等于期望幅值的五分之一;若是,则判定双偏信号位于斯托克斯空间中幅值最小的四个团簇,并增大双偏信号的幅值。
7、在本发明的一个实施例中,其特征在于,通过以下公式计算双偏信号在斯托克斯空间的期望幅值sek:
8、sek=∑i∑j(|rx,k,i|2+|ry,k,j|2)*pij=20r
9、其中,r表示双偏信号;x表示x偏振;y表示y偏振;p表示概率;i和j分别对应x偏振和y偏振不同幅值符号出现的情况;k表示第k个双偏信号;r为归一化系数,数值随归一化不同而变化。
10、在本发明的一个实施例中,迭代计算的公式如下:
11、
12、
13、其中,为双偏信号在斯托克斯空间的坐标对;η为迭代步长;m为幅值增大的系数;为接收到第i个双偏信号后更新的法向量;a为为向量。
14、在本发明的一个实施例中,所述解偏矩阵如下:
15、
16、其中,p=atan(n1,(n2+n3)1/2)/2,q=atan(n2,n3)/2;拟合平面的法向量
17、在本发明的一个实施例中,当双偏信号为双偏16qam信号时,m=9。
18、本发明还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一项所述方法的步骤。
19、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述任一项所述方法的步骤。
20、本发明还提供了一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述任一项所述的方法。
21、本发明还提供了一种基于斯托克斯三维空间的幅值自适应相干光解偏系统,其包括:
22、判断模块,用于判断接收到的双偏信号是否位于斯托克斯空间中幅值最小的四个团簇;
23、幅值增大模块,用于在判断模块判定接收到的双偏信号位于斯托克斯空间中幅值最小的四个团簇时,增大双偏信号的幅值;
24、迭代计算模块,用于设置初始法向量,利用幅值增大后的双偏信号在斯托克斯空间的坐标对法向量进行迭代计算,得到拟合平面的法向量;
25、解偏模块,用于利用拟合平面的法向量计算解偏矩阵,实现解偏。
26、本发明的上述技术方案相比现有技术具有以下优点:
27、本发明基于斯托克斯三维空间的幅值自适应相干光解偏方法在接收到的双偏信号位于斯托克斯空间中幅值最小的四个团簇时,增大双偏信号的幅值,让这些信号在解偏过程中发挥自身的作用。与原有的基于斯托克斯三维空间的自适应解偏算法相比,本发明所提出方法表现出了更快的收敛速度和更高的恢复精度。
28、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.基于斯托克斯三维空间的幅值自适应相干光解偏方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于斯托克斯三维空间的幅值自适应相干光解偏方法,其特征在于,所述步骤s1包括:先计算双偏信号在斯托克斯空间的期望幅值,判断双偏信号的幅值是否小于等于期望幅值的五分之一;若是,则判定双偏信号位于斯托克斯空间中幅值最小的四个团簇,并增大双偏信号的幅值。
3.根据权利要求2所述的基于斯托克斯三维空间的幅值自适应相干光解偏方法,其特征在于,通过以下公式计算双偏信号在斯托克斯空间的期望幅值sek:
4.根据权利要求1所述的基于斯托克斯三维空间的幅值自适应相干光解偏方法,其特征在于,迭代计算的公式如下:
5.根据权利要求1所述的基于斯托克斯三维空间的幅值自适应相干光解偏方法,其特征在于,所述解偏矩阵如下:
6.根据权利要求4所述的基于斯托克斯三维空间的幅值自适应相干光解偏方法,其特征在于,当双偏信号为双偏16qam信号时,m=9。
7.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1到7任一项所述方法的步骤。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1到7任一项所述方法的步骤。
9.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行权利要求1到7任一项所述的方法。
10.基于斯托克斯三维空间的幅值自适应相干光解偏系统,其特征在于,包括:
技术总结
本发明涉及一种基于斯托克斯三维空间的幅值自适应相干光解偏方法。包括:S1、判断接收到的双偏信号是否位于斯托克斯空间中幅值最小的四个团簇;若是,增大双偏信号的幅值;S2、设置初始法向量,利用幅值增大后的双偏信号在斯托克斯空间的坐标对法向量进行迭代计算,得到拟合平面的法向量;S3、利用拟合平面的法向量计算解偏矩阵,实现解偏。本发明在接收到的双偏信号位于斯托克斯空间中幅值最小的四个团簇时,增大双偏信号的幅值,让这些信号在解偏过程中发挥自身的作用。与原有的基于斯托克斯三维空间的自适应解偏算法相比,本发明所提出方法表现出了更快的收敛速度和更高的恢复精度。
技术研发人员:高明义,王鹏飞
受保护的技术使用者:苏州大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!