深度相机误差校正方法、装置、深度相机及门锁系统与流程
本发明涉及光学及电子,尤其涉及一种深度相机误差校正方法、装置、深度相机及门锁系统。
背景技术:
1、在一些基于深度图像的应用中,需要深度相机获取精度及准度高的深度图像,然而由于深度相机由激光光源、光学元件、图像传感器等元器件构成,因此不可避免的受到自身温度以及环境温度的影响,温度会导致光学元件性能不稳定,同样也会使得深度相机本体发生热变形,这些因素都会使得深度图像的质量下降,从而使深度相机的精准度降低。
2、近年来,越来越多的门锁系统配置了深度相机,但由于季节、天气的变化等等,在进行门锁识别开锁时,环境温度会存在不同。深度相机的精准度降低导致门锁进行人脸识别开锁时,采集的图像不够准确,因此,存在门锁开锁的精确度不高以及人脸开锁效果不佳的问题。
技术实现思路
1、本发明提供一种深度相机误差校正方法、装置、深度相机及门锁系统,以解决上述背景技术中的至少一个问题。
2、为实现上述目的,本发明提供了一种深度相机误差校正方法,包括:利用发射模组向目标区域投射结构光图案化光束;利用成像模组接收目标区域反射的光束,得到结构光图像;获取成像模组和发射模组的当前温度值;根据当前温度值对结构光图像进行补偿,得到补偿后结构光图像;将补偿后结构光图像与参考结构光图像进行视差匹配,得到视差图像;根据视差图像及成像模组的标定焦距计算深度信息,得到深度图像。
3、本发明还提供的一种深度相机误差校正装置,包括:发射单元,用于利用发射模组向目标区域投射结构光图案化光束;接收单元,用于利用成像模组接收目标区域反射的光束,得到结构光图像;温测单元,用于获取成像模组和发射模组的当前温度值;补偿单元,用于根据当前温度值对结构光图像进行补偿,得到补偿后结构光图像;视差匹配单元,用于将补偿后结构光图像与参考结构光图像进行视差匹配,得到视差图像;深度计算单元,用于根据视差图像及成像模组的标定焦距计算深度信息,得到深度图像。
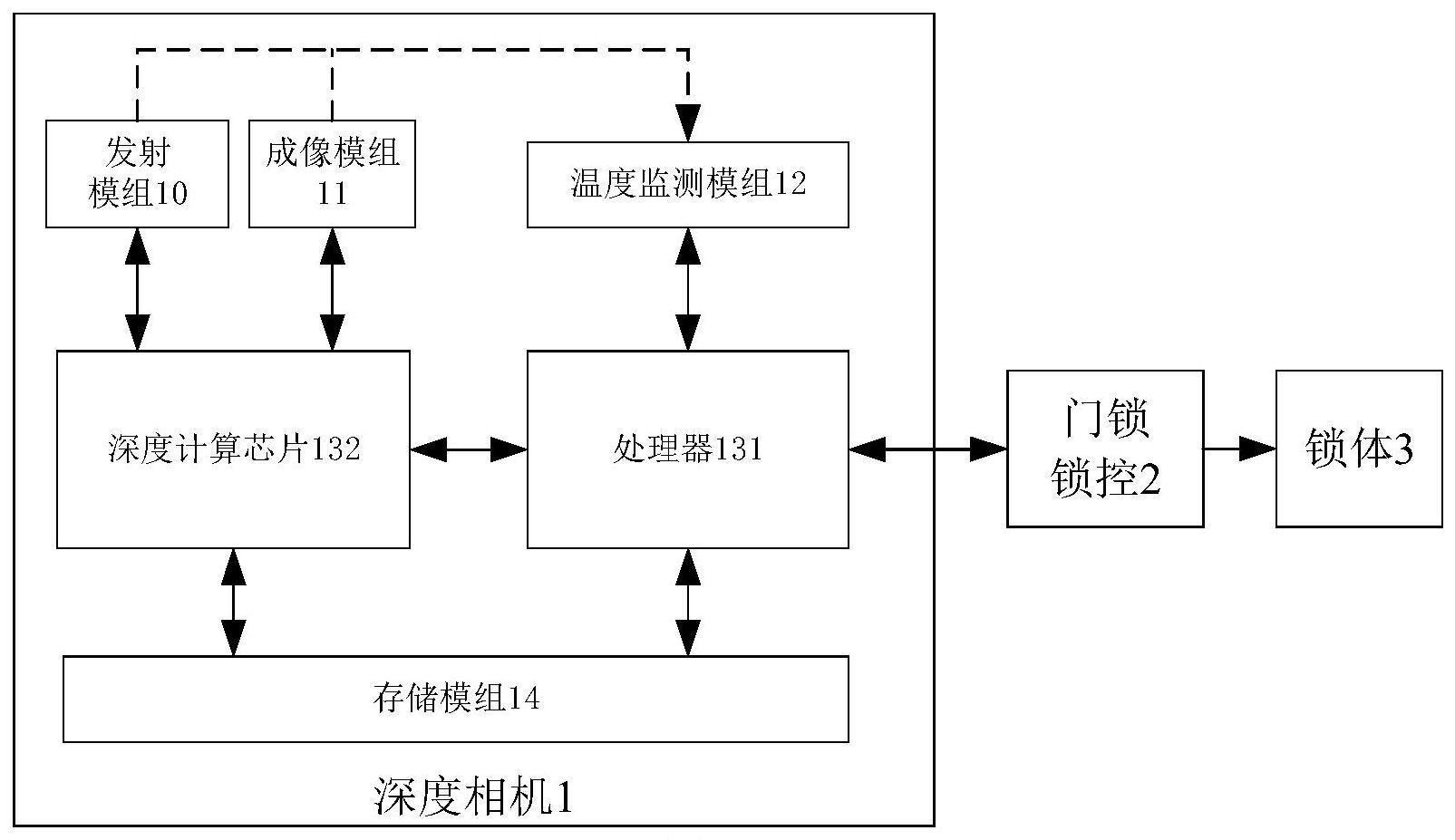
4、本发明还提供一种深度相机,包括:发射模组,用于向目标区域投射结构光图案化光束;成像模组,用于接收目标区域反射的光束,得到结构光图像;温度监测模组,用于获取成像模组和发射模组的当前温度值;处理模组,用于根据当前温度值对结构光图像进行补偿,得到补偿后结构光图像;将补偿后结构光图像与参考结构光图像进行视差匹配,得到视差图像;根据视差图像及成像模组的标定焦距计算深度信息,得到深度图像。
5、本发明还提供了一种门锁系统,包括如上述任意一项的深度相机、门锁锁控及锁体;深度相机,用于获取深度图像并根据深度图像进行人脸识别,得到识别结果;门锁锁控,用于根据识别结果控制锁体的开关。
6、本发明还提供了一种计算机可读存储介质,计算机可读存储介质中存储有至少一个计算机程序,至少一个计算机程序被执行以实现上述的深度相机误差校正方法。
7、本发明提供一种深度相机误差校正方法、装置、深度相机及门锁系统,其深度相机误差校正方法包括:利用发射模组向目标区域投射结构光图案化光束;利用成像模组接收目标区域反射的光束,得到结构光图像;获取成像模组和发射模组的当前温度值;根据当前温度值对结构光图像进行补偿,得到补偿后结构光图像;将补偿后结构光图像与参考结构光图像进行视差匹配,得到视差图像;根据视差图像及成像模组的标定焦距计算深度信息,得到深度图像。本发明通过温度值的变化改变对结构光图像的补偿,得到补偿后结构光图像再进行视差匹配得到深度图像,能够提高深度相机在温度改变后的测量精度,提高识别准确度。
技术特征:
1.一种深度相机误差校正方法,其特征在于,包括:
2.如权利要求1所述的深度相机误差校正方法,其特征在于,所述根据所述当前温度值对所述结构光图像进行补偿,得到补偿后结构光图像,包括:
3.如权利要求2所述的深度相机误差校正方法,其特征在于,所述根据所述当前温度值,计算所述成像模组随温度变化后的焦距,得到更新后的目标焦距,包括:
4.一种深度相机误差校正装置,其特征在于,包括:
5.如权利要求4所述的深度相机误差校正装置,其特征在于,所述补偿单元,具体用于:
6.一种深度相机,其特征在于,包括:
7.如权利要求6所述的深度相机,其特征在于,所述处理模组包括:
8.如权利要求6所述的深度相机,其特征在于,还包括:
9.一种门锁系统,其特征在于,包括如权利要求6至8任意一项所述的深度相机、门锁锁控及锁体;
10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求1至3中任意一项所述的深度相机误差校正方法。
技术总结
本发明涉及一种深度相机误差校正方法、装置、深度相机及门锁系统,其深度相机误差校正方法包括:利用发射模组向目标区域投射结构光图案化光束;利用成像模组接收目标区域反射的光束,得到结构光图像;获取成像模组和发射模组的当前温度值;根据当前温度值对结构光图像进行补偿,得到补偿后结构光图像;将补偿后结构光图像与参考结构光图像进行视差匹配,得到视差图像;根据视差图像及成像模组的标定焦距计算深度信息,得到深度图像。本发明通过温度值的变化改变对结构光图像的补偿,得到补偿后结构光图像再进行视差匹配得到深度图像,能够提高深度相机在温度改变后的测量精度,提高识别准确度。
技术研发人员:黄剑勇,付一鸣
受保护的技术使用者:奥比中光科技集团股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!