一种国产无人装备综合通导一体化设备的制作方法
本技术涉及通导一体化的,具体而言,涉及一种国产无人装备综合通导一体化设备。
背景技术:
1、通信、导航属于不同的领域,随着无线宽带通信和定位导航技术的快速发展,特别是无人装备行业的兴起,通信和导航的耦合程度不断加深,产生了通信导航一体化技术,基于天基的北斗卫星应用首次提出通导结合的场景,并成为了国内外研究热点。
2、将通信和导航功能共同在一个系统中实现,即可称为通信导航一体化。通信和导航的一体化程度经过了由松耦合到紧耦合的发展过程。
3、由于目前没有专门针对无人艇配置的通导一体化设备,采用通用设备与无人艇的使用需求并不吻合,具体来讲,存在以下几点问题:
4、1、通信带宽不匹配,不利于故障诊断,目前无人艇使用的通用通信设备中,移动通信专网设备上下行特点与无人艇的需求极不匹配;自组网设备上下行可灵活调整,带宽相对较宽,较为适合无人艇使用,但是其抗干扰性能和遥控链路的可靠性较差;无人机数据链较为可靠,但是其带宽一般在4~8mbps,承载业务能力弱,无法满足无人艇导航、雷达、光电、声呐、摄像头等集多种传感器于一身的通信带宽要求。
5、2、导航设备系统复杂,精度低,在通用导航设备中,传统组合导航设备配备组合的导航系统导航精度较差,不利于海洋测绘、精确定位的要求,而如果采用rtk导航系统就需要额外增加岸基基准站,窄带无线通信设备,不利于装备模块化部署,快速集成,对维修性,测试性都不利。
6、3、传统无人艇,通信、导航等载荷设备相对独立,不仅占用空间大,而且系统复杂度高,可靠性差,载荷之间协同控制难度大。
7、综上所述,现有无人艇通用载荷集成化程度低、通信带宽不足、导航精度差。故研制一种适合于无人艇应用的通导一体化载荷设备非常重要。
技术实现思路
1、本实用新型的目的在于:提供一种无人艇专用的通导一体化载荷设备。
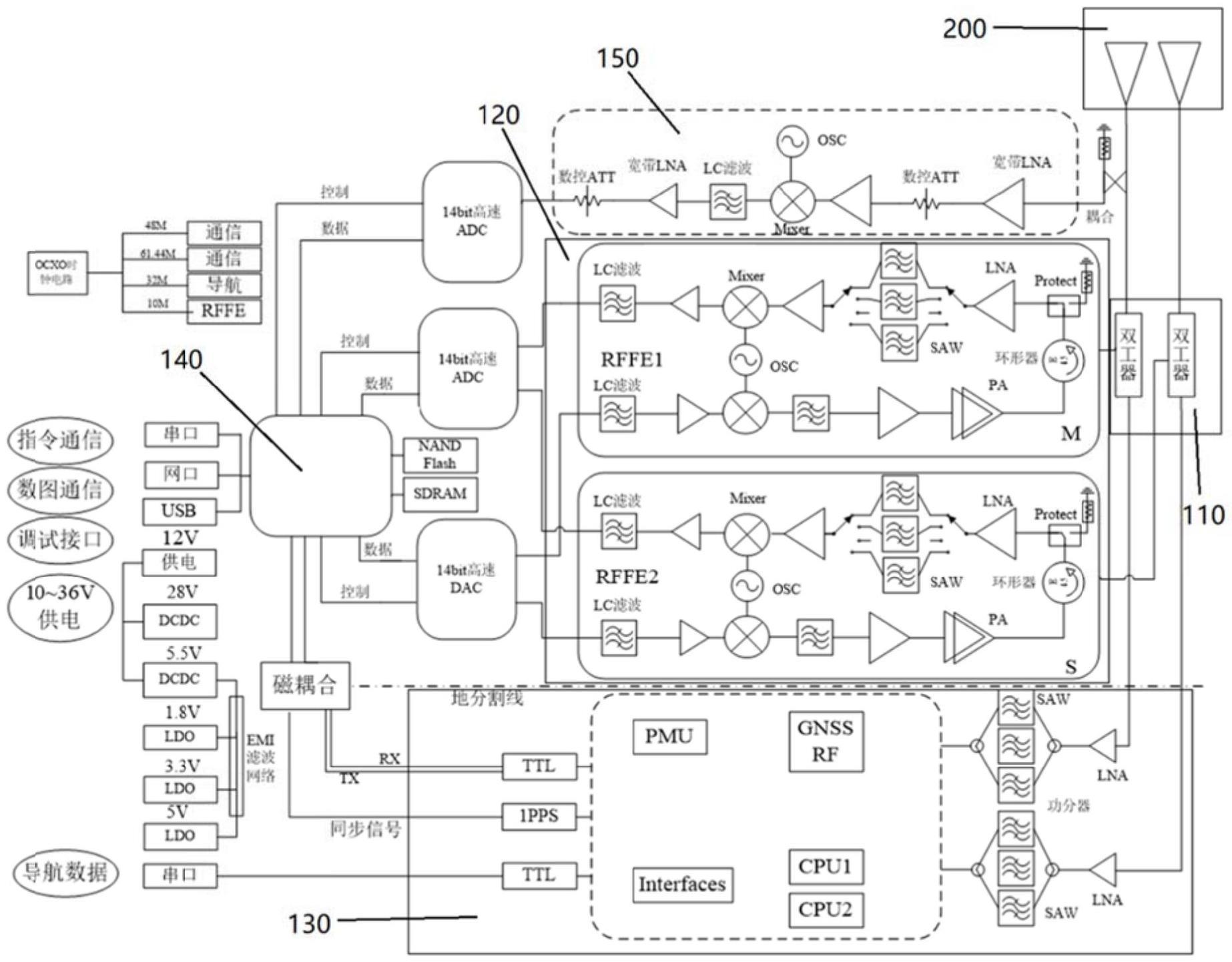
2、本实用新型的技术方案是:提供了一种国产无人装备综合通导一体化设备,该设备包括:天线、双工器、通信单元、导航单元、感知单元和mcu单元;
3、天线采取四臂螺旋式结构,四个相同的螺旋臂对称缠绕在棍状金属外壳侧壁,螺旋臂底端为规则切面,螺旋臂顶端分叉为三根不同电长度的耦合天线臂;天线包括:功分馈电网络,功分馈电网络包括四个输出端,分别与四个螺旋臂对应连接,输出信号至双工器;
4、双工器包括三个端口,依次连接天线、通信单元的一端和导航单元的一端;
5、感知单元的一端耦合连接天线;
6、mcu单元分别连接通信单元的另一端、导航单元的另一端和感知单元的另一端。
7、上述任一项技术方案中,进一步地,通信单元包括:环形器、发送通道和接收通道,环形器包括:双向端口、发送端口和接收端口;环形器的发送端口连接发送通道的输入端,环形器的接收端口连接接收通道的输出端,环形器的双向端口连接双工器。
8、上述任一项技术方案中,进一步地,导航单元包括:功分器,功分器的输入端连接双工器,功分器的输出端连接mcu单元。
9、上述任一项技术方案中,进一步地,感知单元包括:耦合器和信号通道,耦合器的一端耦合在天线上,耦合器的另一端连接信号通道的输入端,信号通道的输出端连接mcu单元。
10、上述任一项技术方案中,进一步地,通信单元包括:第一线路与第二线路,第一线路与第二线路各自包括了一个环形器、一条发送通道和一条接收通道。
11、上述任一项技术方案中,进一步地,双工器包括第一双工器和第二双工器,第一双工器连接通信单元第一线路的环形器,第二双工器连接通信单元第二线路的环形器。
12、上述任一项技术方案中,进一步地,天线包括:第一天线和第二天线,第一天线连接第一双工器,第二天线连接第二双工器。
13、本实用新型的有益效果是:
14、本实用新型中的技术方案将通信与导航技术领域产品进行深度融合的一体化设计;仅用单一设备就解决无人艇、智能装备等无人载荷设备空天地一体集群控制和跨域互联的问题;本方案中使用四臂螺旋式结构的天线收发信号,具有抗干扰能力强的优点。
技术特征:
1.一种国产无人装备综合通导一体化设备,其特征在于,所述设备包括:天线(200)、双工器(110)、通信单元(120)、导航单元(130)、感知单元(150)和mcu单元(140);
2.如权利要求1所述的国产无人装备综合通导一体化设备,其特征在于,所述通信单元(120)包括:环形器、发送通道和接收通道,所述环形器包括:双向端口、发送端口和接收端口;所述环形器的发送端口连接所述发送通道的输入端,所述环形器的接收端口连接所述接收通道的输出端,所述环形器的双向端口连接所述双工器(110)。
3.如权利要求1所述的国产无人装备综合通导一体化设备,其特征在于,所述导航单元(130)包括:功分器,所述功分器的输入端连接所述双工器(110),所述功分器的输出端连接所述mcu单元(140)。
4.如权利要求1所述的国产无人装备综合通导一体化设备,其特征在于,所述感知单元(150)包括:耦合器和信号通道,所述耦合器的一端耦合在所述天线(200)上,所述耦合器的另一端连接所述信号通道的输入端,所述信号通道的输出端连接所述mcu单元(140)。
5.如权利要求2所述的国产无人装备综合通导一体化设备,其特征在于,所述通信单元(120)包括:第一线路与第二线路,所述第一线路与所述第二线路各自包括了一个所述环形器、一条所述发送通道和一条所述接收通道。
6.如权利要求5所述的国产无人装备综合通导一体化设备,其特征在于,所述双工器(110)包括第一双工器和第二双工器,所述第一双工器连接所述通信单元(120)第一线路的环形器,所述第二双工器连接所述通信单元(120)第二线路的环形器。
7.如权利要求6所述的国产无人装备综合通导一体化设备,其特征在于,所述天线(200)包括:第一天线和第二天线,所述第一天线连接所述第一双工器,所述第二天线连接所述第二双工器。
技术总结
本技术公开了一种国产无人装备综合通导一体化设备,涉及通导一体化的技术领域,该设备包括:天线、双工器、通信单元、导航单元和MCU单元;通信单元包括:环形器、发送通道和接收通道,其中,环形器包括:双向端口、发送端口和接收端口;环形器的双向端口连接双工器的另一个端口,环形器的发送端口连接发送通道一端,环形器的接收端口连接接收通道一端;导航单元包括:功分器和芯片,其中,功分器一端连接双工器的另一个端口,功分器另一端连接芯片;MCU单元通过ADC转换器连接通信单元的发送通道另一端,MCU单元通过DAC转换器连接通信单元的接收通道另一端,MCU单元连接导航单元的芯片。
技术研发人员:郭成龙,杜俭业,鲍永亮,范新革,卢佳音
受保护的技术使用者:航天科工深圳(集团)有限公司
技术研发日:20221012
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!