实现数据隔离的机器人网络硬件平台
本技术涉及机器人网络硬件平台,特别是涉及实现数据隔离的机器人网络硬件平台。
背景技术:
1、本部分的陈述仅仅是提到了与本实用新型相关的背景技术,并不必然构成现有技术。
2、目前,机器人大多采用模块化设计,各个模块之间与主控制器通信实现环境信息采集、运动控制、语音交互等。通信功能的稳定、高频、通畅是机器人响应快、定位精准的基础。使用较多的有rs485串口通信、can总线通信、网口通信等。部分机器人在工作时用到的传感器数据需要多个控制系统接收使用或监测,这类传感器的数据一般频率较高、数据量较大,需要较高的可扩展性便于调试,所以一般使用网口通信。
3、一般的机器人内部使用工业路由器,将激光雷达、热成像相机、深度相机、主控系统、运动控制系统置于一个局域网内,通过udp协议或tcp协议达到设备间数据的传输。路由器通过ap功能连接到车间或园区的网络,将机器人内部设备整体连接到局域网中,在调试时可以将电脑通过网线或无线网的形式连接到局域网,直接监测机器人内部设备的各个传感器数据。由于部分数据的传输频率高,数据量较大,这会引起机器人内部路由器的卡顿与阻塞,局域网内设备无法访问机器人内部,不利于数据的传输与监测。
4、机器人的各个传感器完全暴露在局域网中,非常容易受到数据影响或人为修改,这不利于机器人系统整体的稳定与安全。
5、综上所述,现有机器人内部设备的连接方法至少存在以下问题:工业路由器直接连接机器人内部设备,容易造成工业路由器数据阻塞;各个系统ip暴露在局域网中,影响机器人内部设备的安全性。
技术实现思路
1、为了解决现有技术的不足,本实用新型提供了实现数据隔离的机器人网络硬件平台;通过设置带有隔离的交换机,有效地隔离高频数据,保护机器人内部设备数据安全。
2、本实用新型提供了实现数据隔离的机器人网络硬件平台;
3、实现数据隔离的机器人网络硬件平台,包括:机器人内部网络设备;
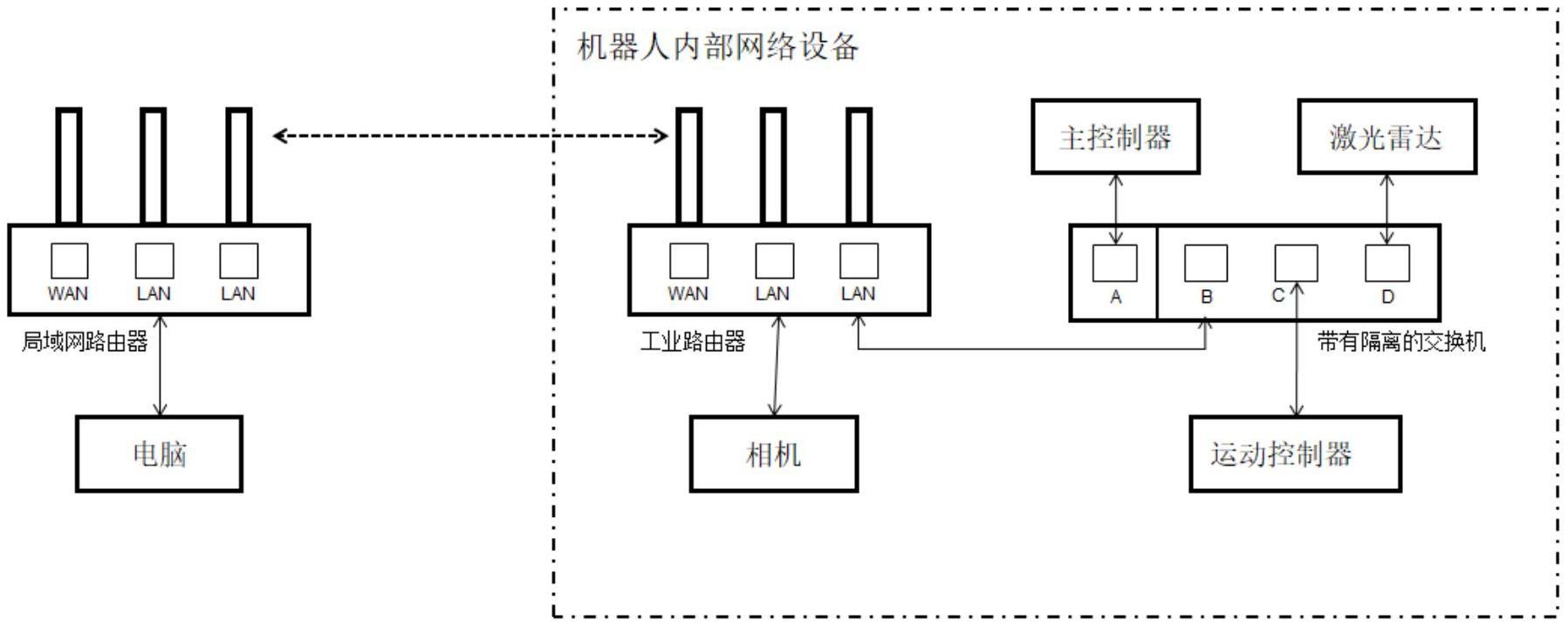
4、所述机器人内部网络设备,包括:工业路由器和带有隔离的交换机,所述工业路由器设有至少一个wan端口和至少两个lan端口;
5、带有隔离的交换机设有一个主端口和若干个副端口,主端口与副端口之间进行连接,副端口与副端口之间不连接;
6、工业路由器的第一lan端口与机器人的相机连接,工业路由器的第二lan端口与带有隔离的交换机的副端口连接,带有隔离的交换机的主端口与机器人的主控制器连接,所述工业路由器与局域网络路由器通信。
7、与现有技术相比,本实用新型的有益效果是:
8、带有端口隔离的交换机能够将机器人内部设备与运动控制器保护在机器人内部,只允许运动控制器和激光雷达与机器人的主控制器进行数据交互,运动控制器和激光雷达不易受到局域网中数据的影响,保证了机器人内部运行的稳定性与安全性。当机器人中有隐私性较强数据时,本实用新型的带有隔离的交换机能够有效的保证机器人内部数据的安全性,使机器人的运行不受外界干扰。
技术特征:
1.实现数据隔离的机器人网络硬件平台,其特征是,包括:机器人内部网络设备;
2.如权利要求1所述的实现数据隔离的机器人网络硬件平台,其特征是,所述带有隔离的交换机设有主端口a、副端口b、副端口c和副端口d。
3.如权利要求2所述的实现数据隔离的机器人网络硬件平台,其特征是,所述主端口a分别与副端口b、副端口c和副端口d通信。
4.如权利要求3所述的实现数据隔离的机器人网络硬件平台,其特征是,所述副端口b、副端口c和副端口d彼此之间不通信。
5.如权利要求4所述的实现数据隔离的机器人网络硬件平台,其特征是,工业路由器的第二lan端口与带有隔离的交换机的副端口b连接。
6.如权利要求4所述的实现数据隔离的机器人网络硬件平台,其特征是,带有隔离的交换机的副端口c与机器人的运动控制器连接。
7.如权利要求4所述的实现数据隔离的机器人网络硬件平台,其特征是,带有隔离的交换机的副端口d与机器人的激光雷达连接。
8.如权利要求1所述的实现数据隔离的机器人网络硬件平台,其特征是,所述局域网络路由器与电脑连接。
9.如权利要求1所述的实现数据隔离的机器人网络硬件平台,其特征是,所述相机用于向局域网传输数据。
10.如权利要求1所述的实现数据隔离的机器人网络硬件平台,其特征是,工业路由器与局域网路由器之间通过无线网连接,在同一个ip网段,连接到局域网路由器的设备允许访问工业路由器中的设备。
技术总结
本技术公开了实现数据隔离的机器人网络硬件平台,所述平台,包括:机器人内部网络设备;所述机器人内部网络设备,包括:工业路由器和带有隔离的交换机,所述工业路由器设有至少一个WAN端口和至少两个LAN端口;带有隔离的交换机设有一个主端口和若干个副端口,主端口与副端口之间进行连接,副端口与副端口之间不连接;工业路由器的第一LAN端口与机器人的相机连接,工业路由器的第二LAN端口与带有隔离的交换机的副端口连接,带有隔离的交换机的主端口与机器人的主控制器连接,所述工业路由器与局域网络路由器通信。
技术研发人员:万熠,张桂新,侯嘉瑞,梁西昌,李亚男,迟峰,王永,刘淑强
受保护的技术使用者:山东大学
技术研发日:20221128
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!