一种考务用考场纪律监督机器人的制作方法
本技术涉及监督机器人,具体为一种考务用考场纪律监督机器人。
背景技术:
1、伴随着人工智能的发展,越来越多的机器人开始进入到各个行业发挥作用,例如物流行业中的分拣机器人,又例如工业行业中的机械臂,它们都算是机器人的一种。
2、对此,中国申请专利号:cn217011043u,公开了一种考务用考场纪律监督机器人,其技术方案要点是:包括外壳,所述外壳的顶面开设有连接槽,所述连接槽的内部底面固定安装有驱动电机a,所述外壳的顶面设置有调整块,所述调整块的底面开设有固定槽,所述固定槽的内圆壁面与所述驱动电机a旋转轴的外圆壁面固定套设;移动组件,所述移动组件设置在所述外壳的内部,用于带动所述外壳在考场内部移动,通过设置固定块,固定块可以为滚轮提供安装位置,通过设置滚轮,滚轮可以在驱动电机b旋转轴的带动下转动,从而带动外壳在考场内部移动,并最终在移动的过程中观察考场内部的考生情况,进而可以在监控考生避免考生作弊,通过设置固定块,固定块可以为滚轮提供安装位置。
3、但是通过滚轮进行移动时,仅仅通过底部的滚轮来对其进行支撑移动稳定,碰撞到物体容易倾斜,从而导致倾倒,没有一些定位部件来对装置整体进行限位,因此我们对上述问题进行完善和改进成为目前亟需解决的问题。
技术实现思路
1、本实用新型的目的在于提供一种考务用考场纪律监督机器人,以解决上述背景技术中提出的通过滚轮进行移动时,仅仅通过底部的滚轮来对其进行支撑移动稳定,碰撞到物体容易倾斜,从而导致倾倒,没有一些定位部件来对装置整体进行限位的问题。
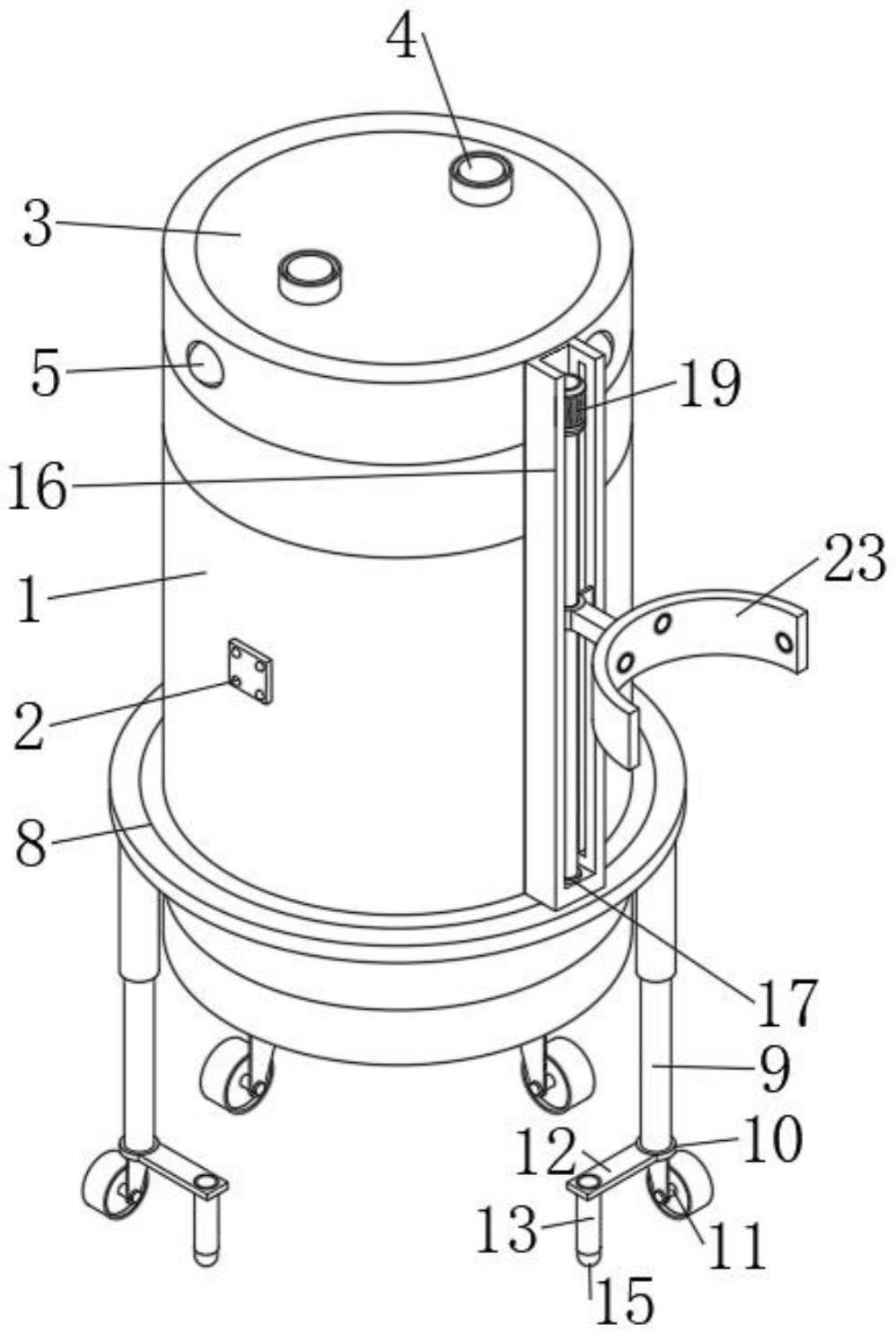
2、为实现上述目的,本实用新型提供如下技术方案:一种考务用考场纪律监督机器人,包括机器人本体,所述机器人本体的外表面设置有控制面板,所述机器人本体的表面一侧设置有外环,所述外环的底端固定连接有连接杆,所述连接杆设置有四组,四组所述连接杆皆安装在外环的底面;
3、安装轴承,所述安装轴承安装在连接杆的外表面上,所述连接杆的底端固定连接有限位轮,所述安装轴承的左侧表面设置有支撑板,所述支撑板的底端设置有支撑柱,所述支撑柱的内部设置有稳定轴。
4、优选的,所述稳定轴的内部设置有限位球,所述限位球安装在支撑柱的内部。
5、优选的,所述机器人本体的顶端设置有顶环,所述顶环的顶面设置有信号屏蔽器,所述顶环的外表面设置有监控器。
6、优选的,所述机器人本体的底端设置有驱动板,所述驱动板的底端设置有驱动轮。
7、优选的,所述机器人本体的表面另一侧固定连接有安装架,所述安装架的内底壁固定连接有底环,所述底环的顶端固定连接有往复丝杆本体,所述安装架的内侧壁开设有限位槽。
8、优选的,所述往复丝杆本体的顶面设置有电机本体,所述往复丝杆本体的外表面设置有往复环,所述往复环的左右两侧皆设置有限位块,限位块与限位槽之间相互适配。
9、优选的,所述往复环的右侧表面固定连接有连接板,所述连接板远离限位块的一端固定连接有金属检测环。
10、与现有技术相比,本实用新型的有益效果是:
11、1、该考务用考场纪律监督机器人,通过设置的驱动板、驱动轮、外环、连接杆、安装轴承、限位轮、支撑板、支撑柱、稳定轴和限位球,在使用时,首先通过驱动板和驱动轮的设计能够使得机器人本体整体进行移动,并且在移动的过程中,通过连接杆、安装轴承和限位轮的设计能够辅助驱动轮进行移动,避免机器人本体倾倒,同时通过支撑柱、稳定轴和限位球的设计能够进一步的对机器人本体进行辅助支撑,加强了机器人本体移动时的稳定性,体现了设计的功能性。
12、2、该考务用考场纪律监督机器人,通过设置的安装架、底环、往复丝杆本体、电机本体、往复环、限位块、连接板和金属检测环,在使用时,通过控制面板启动电机本体,通过电机本体带动往复丝杆本体转动,从而往复丝杆本体带动往复环进行上下的移动,并且在移动时,进考场的学生站在金属检测环的周围,通过往复环带动连接板和金属检测环上下升降一次,从而能够通过金属检测环对学生身上的违规品进行检查,增强了操作的智能效果,体现了设计的巧妙性。
技术特征:
1.一种考务用考场纪律监督机器人,包括机器人本体(1),所述机器人本体(1)的外表面设置有控制面板(2),其特征在于:所述机器人本体(1)的表面一侧设置有外环(8),所述外环(8)的底端固定连接有连接杆(9),所述连接杆(9)设置有四组,四组所述连接杆(9)皆安装在外环(8)的底面;
2.根据权利要求1所述的一种考务用考场纪律监督机器人,其特征在于:所述稳定轴(14)的内部设置有限位球(15),所述限位球(15)安装在支撑柱(13)的内部。
3.根据权利要求1所述的一种考务用考场纪律监督机器人,其特征在于:所述机器人本体(1)的顶端设置有顶环(3),所述顶环(3)的顶面设置有信号屏蔽器(4),所述顶环(3)的外表面设置有监控器(5)。
4.根据权利要求1所述的一种考务用考场纪律监督机器人,其特征在于:所述机器人本体(1)的底端设置有驱动板(6),所述驱动板(6)的底端设置有驱动轮(7)。
5.根据权利要求1所述的一种考务用考场纪律监督机器人,其特征在于:所述机器人本体(1)的表面另一侧固定连接有安装架(16),所述安装架(16)的内底壁固定连接有底环(17),所述底环(17)的顶端固定连接有往复丝杆本体(18),所述安装架(16)的内侧壁开设有限位槽。
6.根据权利要求5所述的一种考务用考场纪律监督机器人,其特征在于:所述往复丝杆本体(18)的顶面设置有电机本体(19),所述往复丝杆本体(18)的外表面设置有往复环(20),所述往复环(20)的左右两侧皆设置有限位块(21),限位块(21)与限位槽之间相互适配。
7.根据权利要求6所述的一种考务用考场纪律监督机器人,其特征在于:所述往复环(20)的右侧表面固定连接有连接板(22),所述连接板(22)远离限位块(21)的一端固定连接有金属检测环(23)。
技术总结
本技术涉及监督机器人技术领域,具体为一种考务用考场纪律监督机器人,包括机器人本体,所述机器人本体的外表面设置有控制面板,所述机器人本体的表面一侧设置有外环,所述外环的底端固定连接有连接杆,所述连接杆设置有四组,四组所述连接杆皆安装在外环的底面;安装轴承,所述安装轴承安装在连接杆的外表面上,所述连接杆的底端固定连接有限位轮。本技术通过连接杆、安装轴承和限位轮的设计能够辅助驱动轮进行移动,避免机器人本体倾倒,同时通过支撑柱、稳定轴和限位球的设计能够进一步的对机器人本体进行辅助支撑,加强了机器人本体移动时的稳定性。
技术研发人员:黄俊河,米强
受保护的技术使用者:中邦盈佳建设有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!