机器人用多维度监控模组的制作方法
本申请涉及视频监控,尤其是涉及一种机器人用多维度监控模组。
背景技术:
1、随着视频监控技术的迅猛发展,当前大多数视觉模组都可实现广角拍摄。为进一步扩宽视场,一些视觉模组增设上下俯仰调节结构以拓宽垂直视场,另一些视觉模组增设左右调节结构以扩宽水平视场,如此实现大视场范围的监控。然而,这些视场范围的调节仅限于在某一固定高度上进行俯仰调节或左右调节进行监控,当视觉模组跟随机器人移动过程中遇到在当前高度上有障碍物遮挡拍摄目标的时候,无论通过俯仰调节还是左右调节都难以实现对目标进行摄像作业。
2、为了解决上述问题,亟需提供一种机器人用多维度全视场的监控模组,克服视觉模组因受到障碍物遮挡造成的监控失效问题。
技术实现思路
1、为解决现有存在的技术问题,本申请提供一种机器人用多维度监控模组,能够实现俯仰调节、水平角度调节及高度调节,实现多维度监控拍摄。
2、为达到上述目的,本申请实施例的技术方案是这样实现的:
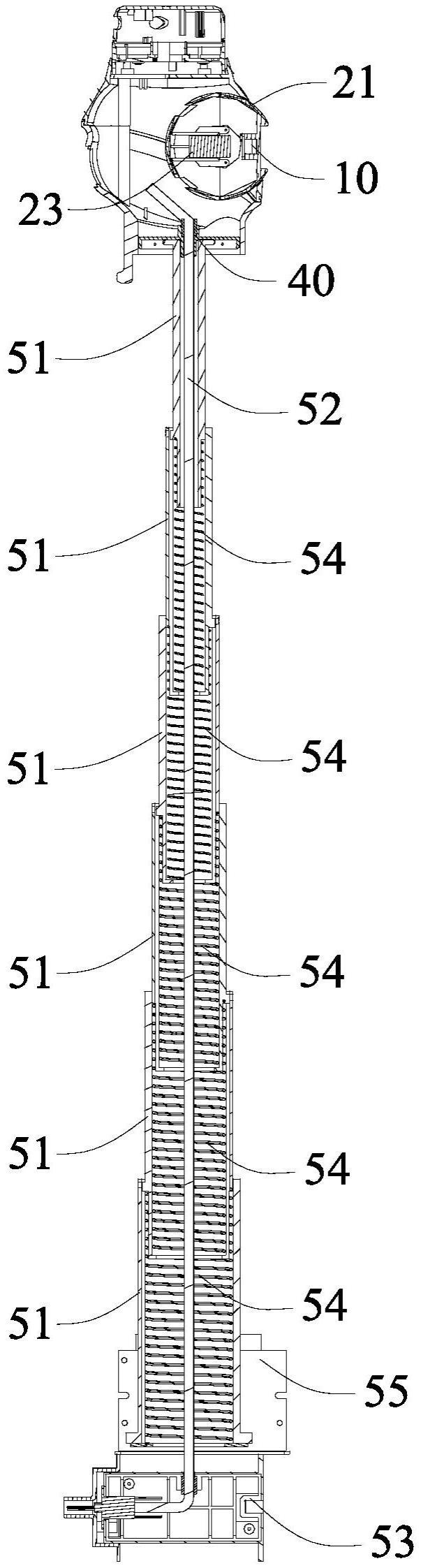
3、本申请实施例提供一种机器人用多维度监控模组,包括摄像模块、球机、外壳、水平旋转驱动电机及升降机构,所述摄像模块安装于所述球机内,所述球机可绕水平方向的俯仰轴线来回摆动地安装于所述外壳内;所述外壳通过所述水平旋转驱动电机安装于所述升降机构上,以使所述水平旋转驱动电机可驱动所述外壳绕竖直方向的旋转轴线转动;所述升降机构可沿所述旋转轴线方向进行高度调节。
4、在其中一个实施例中,所述球机包括球壳、俯仰销轴及舵机,所述摄像模块置于所述球壳内,所述俯仰销轴自所述球壳的一侧沿所述俯仰轴线方向连接于所述外壳,所述舵机安装于所述球壳内且所述舵机的动力输出轴自所述球壳的另一侧沿所述俯仰轴线方向连接于所述外壳。
5、在其中一个实施例中,所述水平旋转驱动电机固定于所述升降机构的顶部,且所述水平旋转驱动电机的动力输出轴沿所述旋转轴线方向连接于所述外壳底部。
6、在其中一个实施例中,所述水平旋转驱动电机为步进电机或伺服电机。
7、在其中一个实施例中,所述升降机构包括多个套杆、绳索、绕绳轮、压缩弹簧及升降驱动电机;所述多个套杆绕所述旋转轴线方向由外至内或由内至外顺次套设;所述绳索的一端连接于顶端的所述套杆,另一端沿所述旋转轴线方向穿过所述多个套杆可收放地连接于所述绕绳轮;所述压缩弹簧沿所述旋转轴线方向设置于相邻的所述套杆之间,以提供给相邻的所述套杆相对在所述旋转轴线方向上升的弹性力;所述升降驱动电机的动力输出轴连接于所述绕绳轮的转轴,以驱动所述绕绳轮回收或释放所述绳索。
8、在其中一个实施例中,所述绳索为钢丝绳,所述升降驱动电机为伺服电机。
9、在其中一个实施例中,所述摄像模块包括用于拍摄获得可见光图像的可见光相机及用于拍摄获得红外热成像图的红外相机。
10、在其中一个实施例中,所述可见光相机与所述红外相机在水平方向上并排设置。
11、本申请的机器人用多维度监控模组至少具有以下有益效果:本申请的机器人用多维度监控模组,外壳底部连接水平旋转驱动电机和升降机构,通过升降机构实现高度调整,通过水平旋转驱动电机实现左右调节,通过外壳内部的球机中的舵机实现摄像模块上下俯仰摆动,从而摄像模组可以实现多维度全视场监控,能够实现通过多维度调节越过障碍物拍摄,消除监控死角,提升监控能力。
技术特征:
1.一种机器人用多维度监控模组,其特征在于:包括摄像模块(10)、球机(20)、外壳(30)、水平旋转驱动电机(40)及升降机构(50),所述摄像模块(10)安装于所述球机(20)内,所述球机(20)可绕水平方向的俯仰轴线来回摆动地安装于所述外壳(30)内;所述外壳(30)通过所述水平旋转驱动电机(40)安装于所述升降机构(50)上,以使所述水平旋转驱动电机(40)可驱动所述外壳(30)绕竖直方向的旋转轴线转动;所述升降机构(50)可沿所述旋转轴线方向进行高度调节。
2.根据权利要求1所述的机器人用多维度监控模组,其特征在于:所述球机(20)包括球壳(21)、俯仰销轴(22)及舵机(23),所述摄像模块(10)置于所述球壳(21)内,所述俯仰销轴(22)自所述球壳(21)的一侧沿所述俯仰轴线方向连接于所述外壳(30),所述舵机(23)安装于所述球壳(21)内且所述舵机(23)的动力输出轴自所述球壳(21)的另一侧沿所述俯仰轴线方向连接于所述外壳(30)。
3.根据权利要求1所述的机器人用多维度监控模组,其特征在于:所述水平旋转驱动电机(40)固定于所述升降机构(50)的顶部,且所述水平旋转驱动电机(40)的动力输出轴沿所述旋转轴线方向连接于所述外壳(30)底部。
4.根据权利要求3所述的机器人用多维度监控模组,其特征在于:所述水平旋转驱动电机(40)为步进电机或伺服电机。
5.根据权利要求1所述的机器人用多维度监控模组,其特征在于:所述升降机构(50)包括多个套杆(51)、绳索(52)、绕绳轮(53)、压缩弹簧(54)及升降驱动电机(55);所述多个套杆(51)绕所述旋转轴线方向由外至内或由内至外顺次套设;所述绳索(52)的一端连接于顶端的所述套杆(51),另一端沿所述旋转轴线方向穿过所述多个套杆(51)可收放地连接于所述绕绳轮(53);所述压缩弹簧(54)沿所述旋转轴线方向设置于相邻的所述套杆(51)之间,以提供给相邻的所述套杆(51)相对在所述旋转轴线方向上升的弹性力;所述升降驱动电机(55)的动力输出轴连接于所述绕绳轮(53)的转轴,以驱动所述绕绳轮(53)回收或释放所述绳索(52)。
6.根据权利要求5所述的机器人用多维度监控模组,其特征在于:所述绳索(52)为钢丝绳,所述升降驱动电机(55)为伺服电机。
7.根据权利要求1至6中任一项所述的机器人用多维度监控模组,其特征在于:所述摄像模块(10)包括用于拍摄获得可见光图像的可见光相机(11)及用于拍摄获得红外热成像图的红外相机(12)。
8.根据权利要求7所述的机器人用多维度监控模组,其特征在于:所述可见光相机(11)与所述红外相机(12)在水平方向上并排设置。
技术总结
本申请提供一种机器人用多维度监控模组,包括摄像模块、球机、外壳、水平旋转驱动电机及升降机构,所述摄像模块安装于所述球机内,所述球机可绕水平方向的俯仰轴线来回摆动地安装于所述外壳内;所述外壳通过所述水平旋转驱动电机安装于所述升降机构上,以使所述水平旋转驱动电机可驱动所述外壳绕竖直方向的旋转轴线转动;所述升降机构可沿所述旋转轴线方向进行高度调节。本申请的机器人用多维度监控模组中,外壳底部连接水平旋转驱动电机和升降机构,通过升降机构实现高度调整,通过水平旋转驱动电机实现左右调节,通过球机中的舵机实现摄像模块上下俯仰调节,从而摄像模组可以实现多维度全视场监控,能够越过障碍物拍摄,提升监控能力。
技术研发人员:侯程坤,左昌文
受保护的技术使用者:烟台艾睿光电科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!