拍摄系统及拍摄方法与流程
本公开内容涉及拍摄系统及拍摄方法。
背景技术:
1、以往,已知有实时地识别由相机拍摄到的图像中映出的任意物体的技术。例如,已知有对图像中映出的人物的面部进行识别的面部识别技术(参照“岩井仪雄等著,《基于图像处理的面部检测与面部识别》,信息处理学会研究报告.cvim,[计算机视觉与图像介质]149,2005年5月13日,p343-368”非专利文献1)。
2、在非专利文献1中公开了根据图像中包含的各像素所具有的信息及各像素的相关关系等提取特征量,基于该特征量识别人物的面部。此外,在非专利文献1中记载了通过学习样本图像来生成用于面部识别的识别模型。
3、现有技术文献
4、非专利文献
5、非专利文献1:岩井仪雄等著,《基于图像处理的面部检测与面部识别》,信息处理学会研究报告.cvim,[计算机视觉与图像介质]149,2005年5月13日,p343-368
技术实现思路
1、发明要解决的技术问题
2、然而,在真实空间中存在各种各样种类的物体。为了从拍摄到的图像中包含的多种种类的物体中区分应显示的物体与不应显示的物体而生成与各物体对应的单独的识别模型会导致成本的增加。
3、本发明是为了解决这样的技术问题而完成的,其目的在于,在拍摄系统中,在不生成识别模型的情况下,在拍摄到的图像内区分应显示的物体与不应显示的物体,抑制成本的增加。
4、用于解决上述技术问题的方案
5、本公开内容的拍摄系统具备对配置于真实空间的物体进行拍摄的第1相机、控制部。控制部包含设定部、获取部、判定部、图像处理部。设定部设定真实空间中的第1范围。获取部获取第1相机的位置及姿态。判定部基于第1相机的位置及姿态,判定第1相机所拍摄的图像中包含的物体是否包含于第1范围。图像处理部根据判定部的判定结果,对第1相机拍摄到的图像实施不同的图像处理。
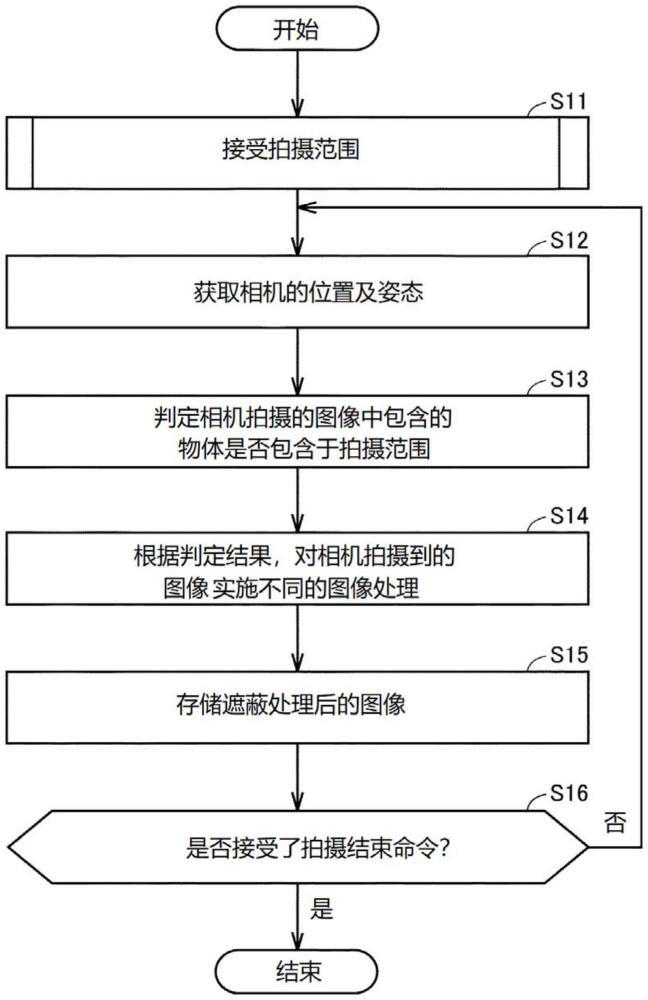
6、本公开内容的拍摄方法是使用相机对配置于真实空间的物体进行拍摄的拍摄方法。本公开内容的拍摄方法包括:设定真实空间中的第1范围的步骤;获取相机的位置及姿态的步骤;基于相机的位置及姿态,判定由相机拍摄的图像中包含的物体是否包含于第1范围的步骤;根据判定的步骤中的判定结果,对第1相机拍摄到的图像实施不同的图像处理的步骤。
7、发明效果
8、在本公开内容的拍摄系统中,由设定部设定第1范围,判定部判定拍摄到的图像中包含的物体是否为不包含于该第1范围的物体。图像处理部根据判定部的判定结果,对拍摄到的图像实施不同的图像处理。即,拍摄系统生成将配置于第1范围的物体与未配置于第1范围的物体区分显示的图像。通过这样的构成,在拍摄系统中,能够在不生成识别模型的情况下,在图像内区分应显示的物体与不应显示的物体,能够抑制成本的增加。
技术特征:
1.一种拍摄系统,其特征在于,具备对配置于真实空间的物体进行拍摄的第1相机、控制部,
2.如权利要求1所述的拍摄系统,其特征在于,所述图像处理部以由所述判定部判定为不包含于所述第1范围的物体为对象,对所述第1相机拍摄到的图像执行遮蔽处理。
3.如权利要求1所述的拍摄系统,其特征在于,所述第1相机包含惯性传感器,
4.如权利要求1所述的拍摄系统,其特征在于,所述第1相机包含位置传感器,
5.如权利要求1所述的拍摄系统,其特征在于,所述获取部基于所述第1相机拍摄的图像中包含的物体在图像内的位置的变化量,获取所述第1相机的位置及姿态中的至少一方。
6.如权利要求5所述的拍摄系统,其特征在于,所述获取部基于视觉slam技术、sfm技术及vo技术中的至少一种技术,获取所述第1相机的位置及姿态,所述视觉slam技术为视觉同步定位与建图技术,所述sfm技术为运动恢复结构技术,所述vo技术为视觉里程计技术。
7.如权利要求1所述的拍摄系统,其特征在于,所述获取部提取所述图像中包含的标记,基于所述标记相对于基准形状的变化量,获取所述第1相机的位置及姿态。
8.如权利要求1所述的拍摄系统,其特征在于,还具备拍摄所述第1相机的第2相机,
9.如权利要求1所述的拍摄系统,其特征在于,所述判定部基于配置于真实空间的物体与所述第1相机之间的距离,判定所述图像中包含的物体是否包含于所述第1范围。
10.如权利要求9所述的拍摄系统,其特征在于,还具备距离传感器,所述距离传感器检测配置于真实空间的物体与所述第1相机之间的距离。
11.如权利要求9所述的拍摄系统,其特征在于,所述控制部基于通过进行机器学习而生成的推定模型及所述第1相机拍摄的图像,推定配置于真实空间的物体与所述第1相机之间的距离。
12.如权利要求1所述的拍摄系统,其特征在于,所述判定部基于所述第1相机的位置及姿态,判定所述第1相机拍摄的图像中包含的物体是否包含于所述第1范围。
13.如权利要求1所述的拍摄系统,其特征在于,还具备输入装置,
14.如权利要求1所述的拍摄系统,其特征在于,还具备输入装置,
15.如权利要求1所述的拍摄系统,其特征在于,所述设定部提取所述图像中包含的标记,基于所述标记相对于基准形状的变化量来设定所述第1范围。
16.如权利要求1所述的拍摄系统,其特征在于,还具备存储部,
17.如权利要求16所述的拍摄系统,其特征在于,所述控制部基于视觉slam技术或者sfm技术,生成所述特定信息,所述视觉slam技术为视觉同步定位与建图技术,所述sfm技术为运动恢复结构技术。
18.如权利要求1所述的拍摄系统,其特征在于,所述设定部变更基于来自用户的输入而设定的所述第1范围。
19.如权利要求2所述的拍摄系统,其特征在于,还具备显示装置,
20.一种拍摄方法,是使用相机对配置于真实空间的物体进行拍摄的拍摄方法,其特征在于,包括:
技术总结
一种拍摄系统,具备对配置于真实空间的物体进行拍摄的相机(20)、控制部(10)。控制部(10)包含:设定部(11),设定真实空间中的对象范围(Rg1);获取部(12),获取相机(20)的位置及姿态;判定部(13),基于相机(20)的位置及姿态,判定相机(20)所拍摄的图像中包含的物体是否包含于对象范围(Rg1);图像处理部(14),根据判定部(13)的判定结果,对相机(20)所拍摄的图像实施不同的图像处理。
技术研发人员:永岛知贵,田川雄介,高原一真,今井慎司,仓田星哉
受保护的技术使用者:株式会社岛津制作所
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!