一种变焦云台相机的视场自动调整方法及系统
本发明涉及一种变焦云台相机的视场自动调整方法及系统。
背景技术:
1、相机视场(field of view),通俗上理解就是所能看到的视野范围。在实际应用中,比如在对场地架设相机时,往往希望能够调整相机的视场,使其集中于感兴趣的区域。
2、现有的调整相机视场的技术方案主要有人工操作法和云台操作法。
3、其中人工操作法为:在架设相机时,实时查看相机画面,调整相机角度和焦距从而调整当前的拍摄范围。
4、云台操作法为:架设变焦云台相机,实时查看相机画面,远程手动调节云台角度和变焦相机焦距以获得所需的拍摄范围。
5、由此可见,现有技术中的相机视场调整方法,存在人力消耗大、精确率高低、易受人主观影响等问题。
6、cn115222822a公开了一种基于远距离拍摄的移动相机定位校正方法及装置,该技术方案分别在位置1和位置2,调整焦距拍摄目标图像集并获取位置1坐标、位置1云台角度以及位置2坐标、位置2云台角度,将所拍摄的图像集经过卷积神经网络获得特征向量,通过随机样本一致性算法确定两组最相似匹配特征点,以此确定转换矩阵。结合位置1坐标、位置1云台角度、位置2坐标、位置2云台角度及转换矩阵即可确定位置3坐标与位置3云台角度,若位置3仍未达到预设位置,则将位置2、位置3分别作为位置1、位置2重复上述过程直到到达预设位置。该技术方案需要一致性算法确定最佳匹配特征点,速度较慢,比较适用于航空航天领域等远距离的拍摄。
7、cn113489970a公开了一种云台相机的校正方法和装置、存储介质及电子装置,该技术方案在待校正相机图像中存在目标地物,与标准地物相互匹配,当二者在图像中的坐标偏移量大于或者等于目标偏移量阈值的情况下确定对该相机进行校正。通过目标雷达获得目标地物的位置,与预设的位置信息比对获得相机姿态偏移,从而校正云台相机。但是,该技术方案使用了雷达,故成本较高。
技术实现思路
1、当我们需要对多块类似场地(如足球场,篮球场)进行相机架设,希望几块场地的相机视野是一样的或者是相似的,因此需要较低成本较高速度实现变焦云台相机的视场较高精度自动调整。本发明的的目的是克服现有技术的不足,提供一种变焦云台相机的视场自动调整方法及系统,由目标图像与待调整相机当前图像获得云台方位角和相机焦距的具体调整情况,由此实现不同场地的相机拥有相同的视场。
2、本发明提供的技术方案如下:
3、一种变焦云台相机的视场自动调整方法,
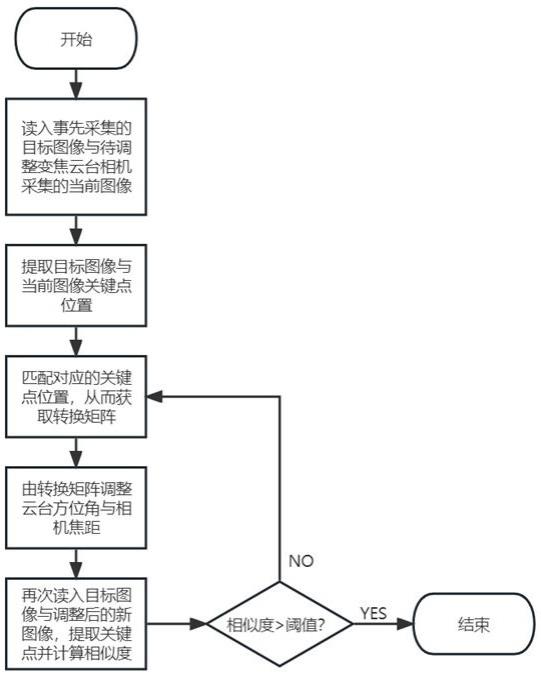
4、1)读入事先采集的目标图像与待调整变焦云台相机采集的当前图像;
5、2)提取目标图像与当前图像关键点的位置;
6、3)匹配对应的关键点位置,从而获取转换矩阵;
7、4)由转换矩阵调整云台方位角与相机焦距;
8、5)再次读入目标图像与调整后的图像,提取关键点并计算相似度;
9、6)如果相似度大于阈值,结束;如果如果相似度小于或者等于阈值,转到步骤3)。
10、所述的步骤1)中的目标图像为人为事先设置的图像,目标图像与当前图像均保持4k及以上分辨率。
11、所述的步骤2)中的关键点提取方法为深度神经网络算法。
12、所述的步骤3)中的关键点匹配方法为匈牙利算法,获取转换矩阵的方法为基本几何变换。
13、所述的步骤4)中的转换矩阵通过基本几何变换反运算获得相应的三轴旋转角与缩放情况从而调整云台方位角与相机焦距。
14、所述的步骤5)中的相似度计算方法为欧氏距离衡量相似度。
15、所述的步骤6)中的阈值人为设置,用以调节相似程度要求。
16、所述的步骤2)、步骤3)中采用霍夫变换图像处理方法识别匹配几何形状与关键点。
17、一种变焦云台相机的视场自动调整系统,采用了所述的一种变焦云台相机的视场自动调整方法;包括:摄像装置、云台、录像设备与网络传输设备、服务器;
18、所述的摄像装置用于拍摄场景中已知的关键线与关键点;
19、所述的云台用于远程控制调整相机方位角;
20、所述的录像设备与网络传输设备用于录制存储摄像装置拍摄的内容并传输给服务器。
21、所述的关键线与关键点为场地已有的标准尺寸线与点,或者场地新设置的尺寸线与点。
22、本发明的有益效果:
23、1. 针对多块类似场地相机架设时希望不同场地相机拥有相同的视场,本发明提供了一种变焦云台相机的视场自动调整方法,通过利用场地的关键点信息自动调整云台方位角与相机焦距,能够实现不同场地下变焦云台相机拥有相同的视场。相比于现有技术,速度更快,自动化更方便,可同时用于多块场地。
24、2. 同时云台与相机均可拆卸,对于临时场地使用非常方便,用完即可拆除重复利用。相比于现有技术,成本较低,设备可重复利用。
25、3. 可用于多种场地,如足球场、篮球场可以直接利用其自带的标志线标志点,边线中线禁区线及其线段角点等等,若无标志线可人为自行放置标志物(如带颜色的球)进行识别定位,所以可以拓展到任意场地,应用场景广泛。
技术特征:
1.一种变焦云台相机的视场自动调整方法,其特征在于,
2.根据权利要求1所述的一种变焦云台相机的视场自动调整方法,其特征在于,所述的步骤1)中的目标图像为人为事先设置的图像,目标图像与当前图像均保持4k及以上分辨率。
3.根据权利要求1所述的一种变焦云台相机的视场自动调整方法,其特征在于,所述的步骤2)中的关键点提取方法为深度神经网络算法。
4.根据权利要求1所述的一种变焦云台相机的视场自动调整方法,其特征在于,所述的步骤3)中的关键点匹配方法为匈牙利算法,获取转换矩阵的方法为基本几何变换。
5.根据权利要求1所述的一种变焦云台相机的视场自动调整方法,其特征在于,所述的步骤4)中的转换矩阵通过基本几何变换反运算获得相应的三轴旋转角与缩放情况从而调整云台方位角与相机焦距。
6.根据权利要求1所述的一种变焦云台相机的视场自动调整方法,其特征在于,所述的步骤5)中的相似度计算方法为欧氏距离衡量相似度。
7.根据权利要求1所述的一种变焦云台相机的视场自动调整方法,其特征在于,所述的步骤6)中的阈值人为设置,用以调节相似程度要求。
8.根据权利要求1所述的一种变焦云台相机的视场自动调整方法,其特征在于,所述的步骤2)、步骤3)中采用霍夫变换图像处理方法识别匹配几何形状与关键点。
9.一种变焦云台相机的视场自动调整系统,其特征在于,根据权利要求1所述的一种变焦云台相机的视场自动调整方法;包括:摄像装置、云台、录像设备与网络传输设备、服务器;
10.根据权利要求9所述的一种变焦云台相机的视场自动调整系统,其特征在于,所述的关键线与关键点为场地已有的标准尺寸线与点,或者场地新设置的尺寸线与点。
技术总结
本发明公开了一种变焦云台相机的视场自动调整方法及系统。所述方法,1)读入事先采集的目标图像与待调整变焦云台相机采集的当前图像;2)提取目标图像与当前图像关键点的位置;3)匹配对应的关键点位置,从而获取转换矩阵;4)由转换矩阵调整云台方位角与相机焦距;5)再次读入目标图像与调整后的图像,提取关键点并计算相似度;6)如果相似度大于阈值,结束;如果如果相似度小于或者等于阈值,转到步骤3)。所述系统包括:摄像装置、云台、录像设备与网络传输设备、服务器。相比于现有技术,本发明速度更快,自动化更方便,设备可重复利用,可同时用于多块场地。
技术研发人员:何赛灵,林文杰
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!