茶叶生产线的监视系统及方法与流程
本发明涉及远程监控,尤其涉及一种茶叶生产线的监视系统及方法。
背景技术:
1、在茶叶的生产制造过程中,需要对其生产过程进行监视。现有的监视方法通常采用人工巡视的方式,但人工巡视对象通常仅限于视线所及范围内各工控设备控制面板所显示状态,而对茶叶在生产过程中的实际状态以及部分始终在位置较高区域运转的工控设备的状态,则由于受制于提升上料机、斜面输送机等的拔高作用而处于视线所不能及的范围(具体可参照cn113397004a等专利);从而使得人工监视的效果大打折扣。
2、若通过在生产线上各环节固定安装图像采集设备的模式,一方面,未必有便于安装的物理空间,再者,及时存在安装的物理空间,也会因为在生产过程中所产生的振动会使得所采集的图像因为抖动而模糊,从而无法实现预期的监视效果。或者,若通过在天花板上吊装摄像头等图像采集设备,虽能克服抖动,但却无法解决会存在众多无法覆盖的视线盲区的缺陷。
技术实现思路
1、本发明目的在于公开一种茶叶生产线的监视系统及方法,为茶叶的智能制造提供配套的智能监视。
2、为达上述目的,本发明公开的茶叶生产线的监视系统包括:
3、设置有伸缩杆的滑动车,所述滑动车固定在预设限位轨道的牵引链上,所述伸缩杆上固定有能全方位旋转的云台;所述云台上固定有图像采集设备;
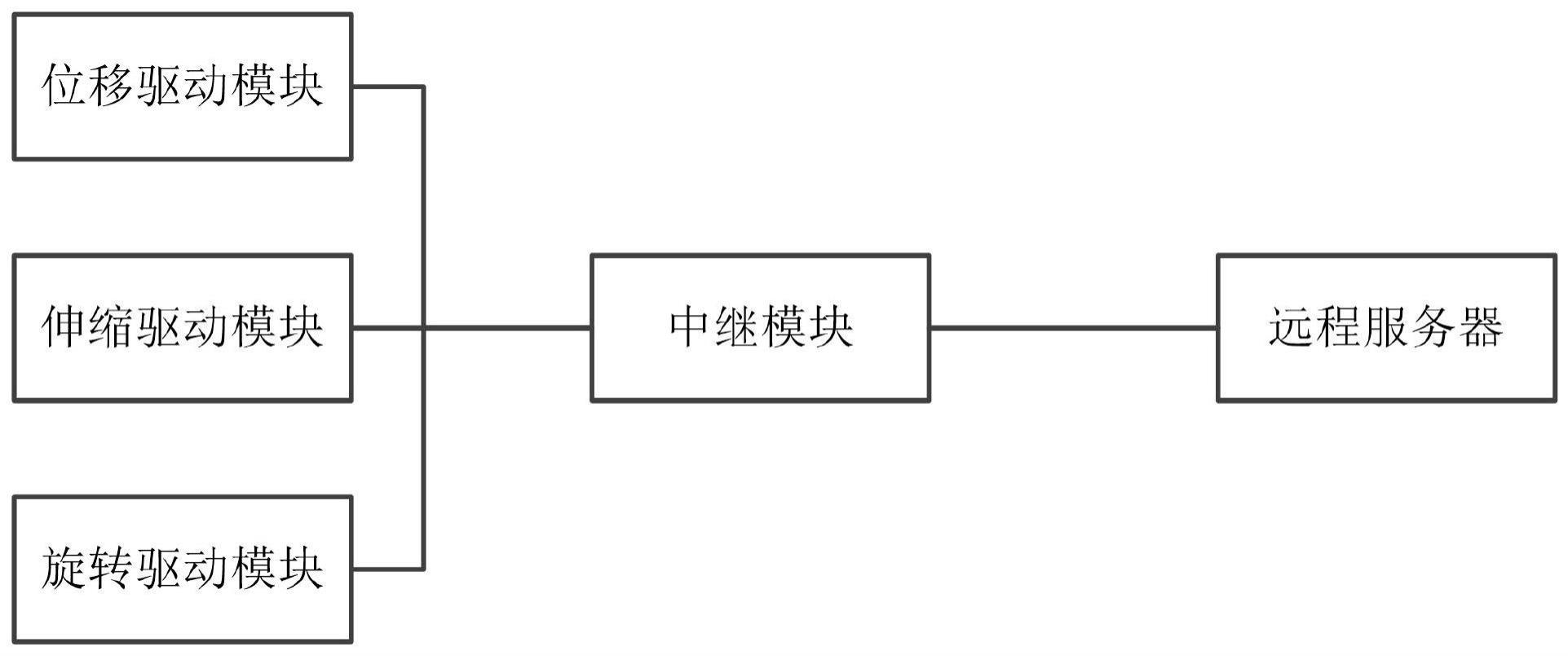
4、所述滑动车上设置有经无线通信模块与远程服务器建立通信连接的中继模块,所述中继模块分别与驱动所述滑动车随牵引链进行位移的位移驱动模块、驱动所述伸缩杆进行伸缩的伸缩驱动模块、驱动所述云台进行旋转的旋转驱动模块、及驱动所述图像采集设备进行相关设置及操作的采集控制模块连接;
5、所述远程服务器用于预先标定各个监视点位在所构建轨道地图中的坐标信息,且建立任一监视点位所分解的各个子任务分别与云台旋转状态、伸缩杆高度及图像采集模式之间的映射关系,所述图像采集模式至少包括拍照模式和对应指定帧率的摄像模式;所述远程服务器还用于执行下述步骤:
6、获取用户输入的第一监视任务,判断当前是否存在未执行完的在先监视任务,若不存在,解析所述第一监视任务中指定的监视点位信息,并根据解析出的点位信息进行路径规划,然后根据规划的路径生成供所述位移驱动模块驱动所述滑动车位移至目标监视点位的位移指令,并在所述滑动车抵达该监视点位后,解析所述第一监视任务在该监视点位的子任务,然后根据解析结果驱动相应的伸缩驱动模块、旋转驱动模块、采集控制模块按伸缩杆由低到高或由高到底的顺序逐一执行各个子任务,然后再根据规划的路径切换至下一监视点位的跟踪处理,依此类推,直至执行完所述第一监视任务中对应所有监视点位的所有子任务。
7、为达上述目的,本发明还公开一种应用于上述系统的茶叶生产线的监视方法,具体包括以下步骤:
8、所述中继模块经无线通信模块与远程服务器建立通信连接;
9、所述远程服务器预先标定各个监视点位在所构建轨道地图中的坐标信息,且建立任一监视点位所分解的各个子任务分别与云台旋转状态、伸缩杆高度及图像采集模式之间的映射关系,所述图像采集模式至少包括拍照模式和对应指定帧率的摄像模式;
10、所述远程服务器获取用户输入的第一监视任务,判断当前是否存在未执行完的在先监视任务,若不存在,解析所述第一监视任务中指定的监视点位信息,并根据解析出的点位信息进行路径规划,然后根据规划的路径生成供所述位移驱动模块驱动所述滑动车位移至当前监视点位的位移指令,并在所述滑动车抵达该监视点位后,解析所述第一监视任务在该监视点位的子任务,然后根据解析结果驱动相应的伸缩驱动模块、旋转驱动模块、采集控制模块按伸缩杆由低到高或由高到底的顺序逐一执行各个子任务,然后再根据规划的路径切换至下一监视点位的跟踪处理,依此类推,直至执行完所述第一监视任务中对应所有监视点位的所有子任务。
11、本发明具有以下有益效果:
12、1、图像采集设备独立于生产线之外,确保了图像采集质量不受生产线的影响而产生抖动。
13、2、用户可根据需要灵活配置监视任务并能实现远程监视。且本发明的远程服务器可对接多个不同生产线,具有很好的扩展性。
14、3、在滑动车配合执行监视任务的过程中,通过轨道进行限位,且牵引链(等同于输送皮带)由位移驱动模块(通常由电机和中间传送机构组成)带动,省略定位模块却可根据预先标定各个监视点位在所构建轨道地图中的坐标信息实现精准定位,确保了图像采集的质量。
15、4、通过监视点位的移动、伸缩杆高度和云台旋转状态,可实现生产线全方位的监视需求,彻底解决了人工巡检受制于视线盲区的困扰。而且,根据标定的各监视站点各子任务与云台旋转状态、伸缩杆高度及图像采集模式之间的映射关系进行联动;通过一套图像采集设备即可高质量完成所有的监视任务,极大地提高了资源利用率。
16、5、各功能模块在执行监视任务的联动过程中,各自所对应的时序逻辑简单可靠!确保了本发明技术在具体实施过程中的可靠性。
17、下面将参照附图,对本发明作进一步详细的说明。
技术特征:
1.一种茶叶生产线的监视系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,若存在在先未执行完的监视任务,按预先设置的冲突解决机制中进行相应处理。
3.根据权利要求2所述的系统,其特征在于,所述第一监视任务中携带有用户指定的优先级;若当前未执行完的在先监视任务的优先级低于所述第一监视任务的优先级,暂停在先监视任务,并在完成该第一监视任务后再恢复执行该在先监视任务中的未完成部分。
4.根据权利要求1至3任一所述的系统,其特征在于,所述远程服务器还用于在切换子任务的过程中,判断是否接收到当前子任务所对应的图像采集结果,如果是,再判断所接收图像采集结果的文件大小是否与否和预先标定的范围,如果符合,切换至下一子任务,如果不符合,指示所述采集控制模块重新进行图像采集;否则,在接收等待时间超过设定的阈值后,判定通信网络是否存在故障,如果存在,输出第一告警;如果不存在通信网络故障,指令所述采集控制模块重新进行图像采集;且在连续两次重新进行的图像采集都失败后,输出第二告警。
5.根据权利要求4所述的系统,其特征在于,所述远程服务器与安装在移动通信终端的app客户端建立通信连接,所述app客户端用于显示所述远程服务器与用户交互的操控界面及监视结果。
6.根据权利要求4所述的系统,其特征在于,所述拍照模式用于采集生产线上各设备所对应指示灯及界面不发生切换的控制面板的状态,所述摄像模式用于采集界面不发生切换的控制面板及茶叶在各设备中的实际状态;且相应子任务所对应摄像模式下的视场角参数、帧率及采集时长都预先予以标定,相应子任务所对应拍照模式下的视场角参数也预先予以标定。
7.根据权利要求4所述的系统,其特征在于,同一监视点位对应同一伸缩杆高度但不同云台旋转参数的监视任务视为不同的子任务,且所述第一监视任务的配置界面中按树状结构排布任一监视点位的各级任务清单列表以供用户指定。
8.根据权利要求7所述的系统,其特征在于,在所述树状结构的各节点中,包括有所监视对象的关键字信息,并根据用户检索输入的关键字自动查找并配齐针对相应监视对象在不同监视点位进行全方位监视的第一监视任务。
9.一种茶叶生产线的监视方法,应用于如权利要求1至8任一所述的系统中,其特征在于,包括以下步骤:
技术总结
本发明涉及智能制造技术领域,公开一种茶叶生产线的监视系统及方法,为茶叶的智能制造提供配套的智能监视。本发明系统包括:设置有伸缩杆的滑动车,所述滑动车固定在预设限位轨道的牵引链上,所述伸缩杆上固定有能全方位旋转的云台;所述云台上固定有图像采集设备;所述滑动车上设置有经无线通信模块与远程服务器建立通信连接的中继模块,所述中继模块分别与驱动所述滑动车随牵引链进行位移的位移驱动模块、驱动所述伸缩杆进行伸缩的伸缩驱动模块、驱动所述云台进行旋转的旋转驱动模块、及驱动所述图像采集设备进行相关设置及操作的采集控制模块连接。
技术研发人员:胡剑
受保护的技术使用者:浮梁县农业开发有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!