基于时间拉伸的压缩超快成像装置、方法及存储介质
本申请涉及但不限于高速成像,尤其涉及一种基于时间拉伸的压缩超快成像装置、方法及存储介质。
背景技术:
1、超快成像技术是探知各种未知瞬态过程的一项关键核心技术,利用超快成像技术能够记录不可重复或难以产生的瞬态事件。相关技术中,压缩超快成像(compressed ultrafastphotography,cup)是超快成像中最常见的成像系统之一,在可视化的二维空间信息超快成像中广泛应用。但cup成像的时间分辨率受制于条纹相机中条纹管的响应时间分辨率,一般能够达到的时间分辨率只有皮秒级,超快成像时间分辨率较低。
技术实现思路
1、本申请实施例提供了一种基于时间拉伸的压缩超快成像装置、方法及存储介质,能够有效提高超快成像的时间分辨率。
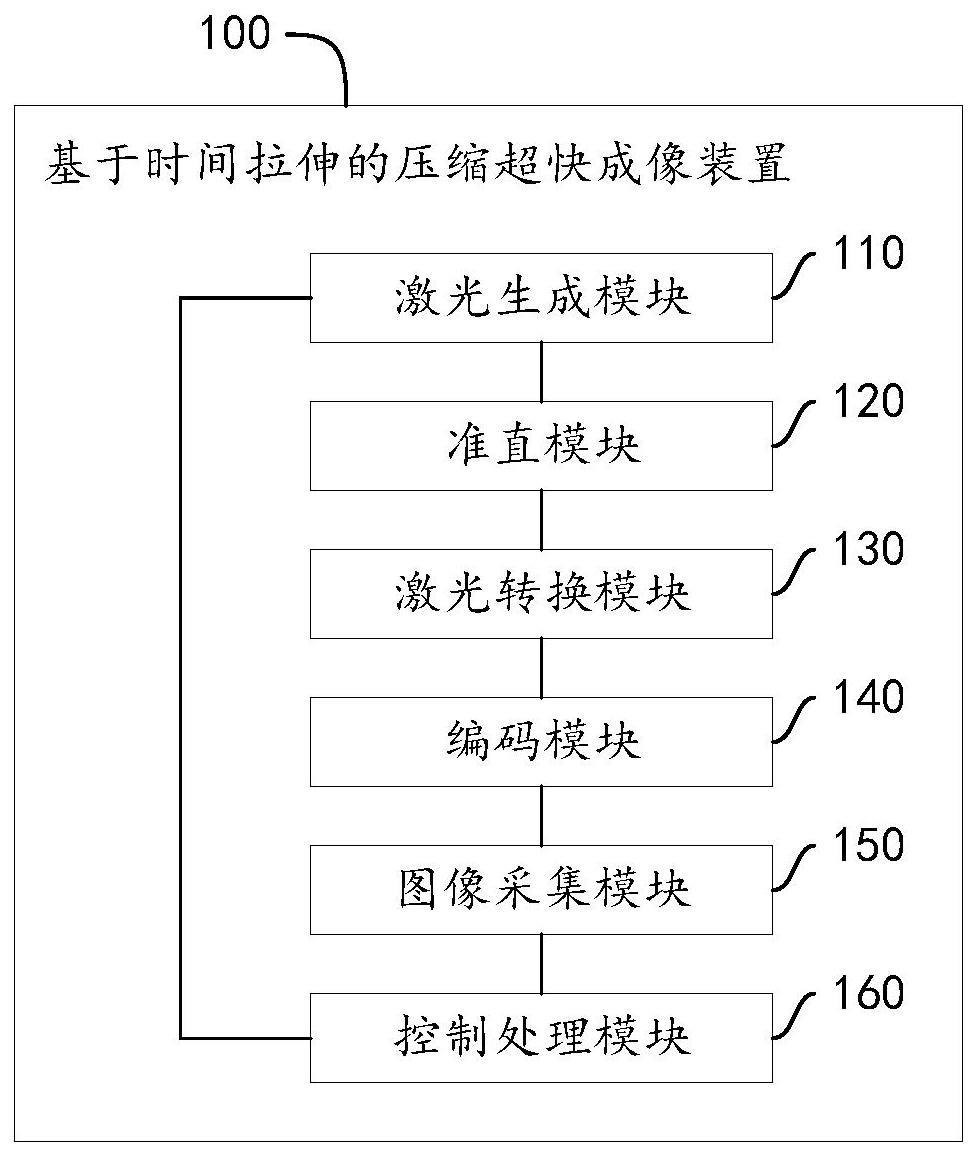
2、第一方面,本申请实施例提供了一种基于时间拉伸的压缩超快成像装置,包括:
3、激光生成模块,所述激光生成模块用于发出激光;
4、准直模块,所述准直模块与所述激光生成模块光路连接,所述准直模块用于对所述激光进行准直处理;
5、激光转换模块,所述激光转换模块与所述准直模块光路连接,所述激光转换模块用于将准直后的所述激光转换成空间光;
6、编码模块,所述编码模块与所述激光转换模块光路连接,所述编码模块用于根据所述空间光进行编码;
7、图像采集模块,所述图像采集模块与所述编码模块连接;
8、控制处理模块,所述控制处理模块分别与所述激光生成模块和所述图像采集模块通信连接,所述控制处理模块用于根据所述图像采集模块发送的观测图像得到目标图像序列帧。
9、根据本申请第一方面实施例的基于时间拉伸的压缩超快成像装置,至少具有如下有益效果:基于时间拉伸的压缩超快成像装置包括:激光生成模块、准直模块、激光转换模块、编码模块、图像采集模块和控制处理模块,其中,准直模块与激光生成模块光路连接,激光转换模块与准直模块光路连接,编码模块与激光转换模块光路连接,图像采集模块与编码模块连接,控制处理模块分别与激光生成模块和图像采集模块通信连接。控制处理模块控制激光生成模块发出激光,再利用准直模块对激光进行准直处理,以提高激光的方向稳定性,随后经激光转换模块将准直后的激光转换成空间光,以便于利用编码模块根据空间光进行编码,空间光完成编码后经光路传输至图像采集模块,图像采集模块用于采集观测图像,再通过控制处理模块根据图像采集模块发送的观测图像得到目标图像序列帧,能够有效提高超快成像的时间分辨率。基于本申请提供的基于时间拉伸的压缩超快成像装置,利用激光转换模块对激光进行时间拉伸得到空间光,再利用编码模块对空间光进行空间分离并进行编码,空间光完成编码后经光路传输至图像采集模块,能够实现超快动态场景的拍摄,再通过控制处理模块根据图像采集模块发送的观测图像得到目标图像序列帧,以重构出超快动态场景的目标图像序列帧,相较于相关技术中采用受制于条纹相机中条纹管的响应时间分辨率的cup成像,能够有效提高超快成像的时间分辨率。
10、根据本申请第一方面的一些实施例,所述激光生成模块包括激光器和衰减器,所述激光器与所述衰减器光路连接。
11、根据本申请第一方面的一些实施例,所述准直模块包括第一反射镜、第二反射镜和第三反射镜,所述第一反射镜、所述第二反射镜和所述第三反射镜依次光路连接。
12、根据本申请第一方面的一些实施例,所述激光转换模块包括第一准直器、第二准直器和时间色散器,所述时间色散器分别与所述第一准直器和所述第二准直器光路连接。
13、根据本申请第一方面的一些实施例,所述编码模块包括空间色散器、第四反射镜、第五反射镜、第六反射镜、第一透镜、第二透镜、第三透镜、第四透镜和掩码板,所述空间色散器、所述第四反射镜、所述第五反射镜、所述第一透镜、所述第二透镜、所述掩码板、所述第三透镜、所述第四透镜和所述第六反射镜依次光路连接。
14、第二方面,本申请实施例提供了一种基于时间拉伸的压缩超快成像方法,应用于第一方面所述的基于时间拉伸的压缩超快成像装置的控制处理模块,包括:
15、获取所述图像采集模块发送的所述观测图像;
16、利用欠定方程组对所述观测图像进行处理,得到所述观测图像对应的原信号;
17、根据两步迭代收缩/阈值算法对所述原信号进行图像重建,得到所述目标图像序列帧。
18、根据本申请第二方面实施例的基于时间拉伸的压缩超快成像方法,至少具有如下有益效果:获取图像采集模块发送的观测图像,随后利用欠定方程组对观测图像进行处理,得到观测图像对应的原信号,能够有效提高计算效率,再根据两步迭代收缩/阈值算法对原信号进行图像重建,以保证精确重构原信号,得到目标图像序列帧,能够有效提高超快成像的时间分辨率。
19、根据本申请第二方面的一些实施例,所述欠定方程组为y=φx=φψs=as,
20、其中,y表示已知测量值,y∈rm,φ表示测量矩阵,φ的大小为m×n,x表示所述原信号,x∈rn,ψ表示稀疏基矩阵,s表示稀疏系数,s中非零元素的个数为c,且c<m<n,a表示感知矩阵,a=φψ,a的大小为m×n。
21、根据本申请第二方面的一些实施例,所述利用欠定方程组对所述观测图像进行处理,得到所述观测图像对应的原信号,包括:
22、当所述感知矩阵满足限制等距特性准则,利用预设的信号重构算法,得目标稀疏系数;
23、根据所述目标稀疏系数和所述欠定方程组,确定所述原信号。
24、根据本申请第二方面的一些实施例,所述两步迭代收缩/阈值算法为
25、
26、其中,‖·‖2是l2范数,‖·‖tv是tv函数,r表示调整正则化参数与测量保真度的权重比,i表示动态场景数据,t表示时间-空间积分算子,s表示垂直方向上的时间剪切算子,c表示编码算子,e表示所述观测图像的图像数据。
27、第三方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第二方面所述的基于时间拉伸的压缩超快成像方法。
技术特征:
1.一种基于时间拉伸的压缩超快成像装置,其特征在于,包括:
2.根据权利要求1所述的基于时间拉伸的压缩超快成像装置,其特征在于,所述激光生成模块包括激光器和衰减器,所述激光器与所述衰减器光路连接。
3.根据权利要求1所述的基于时间拉伸的压缩超快成像装置,其特征在于,所述准直模块包括第一反射镜、第二反射镜和第三反射镜,所述第一反射镜、所述第二反射镜和所述第三反射镜依次光路连接。
4.根据权利要求1所述的基于时间拉伸的压缩超快成像装置,其特征在于,所述激光转换模块包括第一准直器、第二准直器和时间色散器,所述时间色散器分别与所述第一准直器和所述第二准直器光路连接。
5.根据权利要求1所述的基于时间拉伸的压缩超快成像装置,其特征在于,所述编码模块包括空间色散器、第四反射镜、第五反射镜、第六反射镜、第一透镜、第二透镜、第三透镜、第四透镜和掩码板,所述空间色散器、所述第四反射镜、所述第五反射镜、所述第一透镜、所述第二透镜、所述掩码板、所述第三透镜、所述第四透镜和所述第六反射镜依次光路连接。
6.一种基于时间拉伸的压缩超快成像方法,应用于权利要求1至5任意一项所述的基于时间拉伸的压缩超快成像装置的控制处理模块,其特征在于,包括:
7.根据权利要求6所述的基于时间拉伸的压缩超快成像方法,其特征在于,所述欠定方程组为y=φx=φψs=as,
8.根据权利要求7所述的基于时间拉伸的压缩超快成像方法,其特征在于,所述利用欠定方程组对所述观测图像进行处理,得到所述观测图像对应的原信号,包括:
9.根据权利要求6所述的基于时间拉伸的压缩超快成像方法,其特征在于,所述两步迭代收缩/阈值算法为
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如权利要求6至9中任一项所述的基于时间拉伸的压缩超快成像方法。
技术总结
本申请公开了一种基于时间拉伸的压缩超快成像装置、方法及存储介质,其中,基于时间拉伸的压缩超快成像装置包括:激光生成模块,激光生成模块用于发出激光;准直模块,准直模块与激光生成模块光路连接,准直模块用于对激光进行准直处理;激光转换模块,激光转换模块与准直模块光路连接,激光转换模块用于将准直后的激光转换成空间光;编码模块,编码模块与激光转换模块光路连接,编码模块用于根据空间光进行编码;图像采集模块,图像采集模块与编码模块连接;控制处理模块,控制处理模块分别与激光生成模块和图像采集模块通信连接,控制处理模块用于根据图像采集模块发送的观测图像得到目标图像序列帧,能够有效提高超快成像的时间分辨率。
技术研发人员:孟垂松,丁毅,黄克森,马钊,李英荣,卓节锴,潘剑
受保护的技术使用者:五邑大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!